Вимірювання відстані між об’єктами
- Методи вимірювання відстані між об’єктами
Найточнішими методами вимірювань відстаней між об'єктами є спектрометричні методи, зокрема локаційний метод, заснований на вимірюванні часу проходження вимірюваної відстані променем, швидкість якого відома і залишається незмінною під час вимірювання. Практично для реалізації локаційного методу можна використати всі види випромінювань, але найпоширенішими є методи та засоби радіолокації, оптичної та акустичної локації. Локаційний метод, що грунтується на застосуванні звукових та ультразвукових хвиль, називають ехо-звуковим.
У локаційних засобах джерело випромінювання та приймач знаходяться на одній границі вимірюваного розміру, а на іншій границі – спеціальний відбивач або замість останнього використовується границя об'єкта, відстань до якого визначається.
Радіолокаційний та оптичний локаційний методи застосовуються для вимірювань великих відстаней – від десятків та сотень метрів до багатьох мільйонів кілометрів.
Акустична локація застосовується в твердих, рідких та газоподібних середовищах для вимірювань розмірів та відстаней від одиниць міліметрів до декількох кілометрів, тобто в діапазоні, в якому застосування радіо- та оптичної локації ускладнено через необхідність вимірювати дуже малі часові інтервали (  ...
...  с). Це зумовлено великою швидкістю розповсюдження електромагнітних хвиль, або внаслідок швидкого загасання електромагнітних коливань в рідких та твердих середовищах.
с). Це зумовлено великою швидкістю розповсюдження електромагнітних хвиль, або внаслідок швидкого загасання електромагнітних коливань в рідких та твердих середовищах.
|
|
|
Швидкість розповсюдження звукових та ультразвукових хвиль в повітрі дорівнює 333 м/с, в морській воді 1500 м/с, а в металах 3000...10 000 м/с. Це на 4...6 порядків менше від швидкості розповсюдження електромагнітних коливань, що дозволяє застосовувати акустичну локацію для вимірювання малих відстаней.
Інформація про відстань до контрольованого тіла, точніше до деякої відбиваючої зони, що належить поверхні контрольованого тіла, визначається часовим запізненням прийнятого сигналу, відносно випроміненого. Приблизно таким же чином кажани орієнтуються в просторі. Вони випромінюють вперед направлений пучок ультразвукових коливань і приймають відбитий сигнал. Звукові хвилі розповсюджуються в повітрі з відомою швидкістю, тому по затримці надходження відбитого сигналу можна судити про те, на якій відстані знаходиться предмет, який відбив звук.
- Акустична локація
Ультразвуковий далекомір (віддалемір) проводить вимірювання відстані до контрольованого тіла за схемою ехо-локації (рис. 3.8).
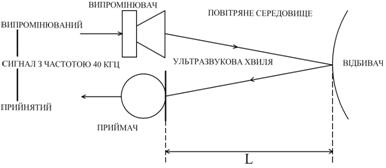
Рис.3.8. Схема дії ультразвукового далекоміра, який працює
за принципом ехо-локації
|
|
|
Часова діаграма ехо-локаційного вимірювального засобу наведена на рис.3.9.
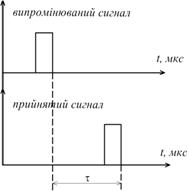
Рис. 3.9. Часова діаграма ехо-локаційного засобу:  - час проходження ультразвукового променя від випромінювача до приймача
- час проходження ультразвукового променя від випромінювача до приймача
Для вимірювання відстані  (
(  , де
, де  - швидкість ультразвукового променя), в повітряному середовищі застосовуються п’єзокерамічні перетворювачі, що працюють на частоті 40 кГц. Два п’єзокерамічні перетворювачі (випромінюваний і приймальний) підібрані так, щоб резонансна частота випромінювання першого перетворювача співпадала з резонансною частотою другого перетворювача.
- швидкість ультразвукового променя), в повітряному середовищі застосовуються п’єзокерамічні перетворювачі, що працюють на частоті 40 кГц. Два п’єзокерамічні перетворювачі (випромінюваний і приймальний) підібрані так, щоб резонансна частота випромінювання першого перетворювача співпадала з резонансною частотою другого перетворювача.
Перевагами застосування таких перетворювачів в повітряному середовищі є: простота випромінювання і прийому коливань, компактність, висока стійкість до шумового, хімічного і оптичного забруднення навколишнього середовища, можливість роботи в агресивних середовищах при високому тиску, можливість значного віддалення вторинної апаратури від місця вимірювань, тривалий термін служби, простота у використанні, порівняно мала вартість, нечутливість до електромагнітних перешкод, висока надійність, несприйнятність органів слуху людини до ультразвука частотою 40 кГц тощо.
Прикладами застосування ультразвукового далекоміра є: контроль дистанції між автотранспортом при його русі в умовах недостатньої видимості, вимірювання рівня заповнення резервуарів рідкою речовиною, рівня завантаження бункерів або кузовів автомобілів сипким або роздробленим матеріалом, контроль розмірів продукції, вимірювання дистанції від борту судна до причальної стінки тощо.
|
|
|
Розглянемо можливу схему і принцип дії ультразвукового віддалеміра (рис. 3.10, рис. 3.11).
При увімкненні живлення та виборі функції вимірювання відстані з допомогою відповідних кнопок кнопочного пульту КП (рис.3.10) (на дисплеї вибирається функція Volume (рис.3.11)) і відбувається процес вимірювання, тобто мікроконтролер МК (рис.3.10) за програмою подає імпульс на блок випромінення, де він підсилюється і подається на пє’зоперетворювач ПВ, що випромінює ультразвуковий сигнал частотою 40 кГц. Відбитий сигнал приймається п’єзоприймачем ПП і підсилюється високочастотним трикаскадним транзисторним підсилювачем до необхідного рівня, оскільки амплітуда прийнятого сигналу внаслідок поглинання повітрям значно менша від випромінюваного. Піковий детектор виділяє із високочастотного прийнятого і підсиленого сигналу імпульс вимірювання.
|
|
|
Оскільки в процесі вимірювання, випромінений сигнал відбивається не тільки від поверхні, до якої необхідно виміряти віддаль, але й від інших навколишніх поверхонь, то для виділення інформативного сигналу після детектора вмикають компаратор. Компаратор відсікає багатократно відбиті сигнали від основного і на його виході з’являється рівень сигналу, подібний до логічного (до 5 В). Цей логічний сигнал надходить до мікроконтролера МК, який запускає програму для обробки процесу вимірювання і відображення результату в рядку 1 на дисплеї віддалеміра (рис.3.11).
Крім вимірювання віддалей, ультразвуковий віддалемір може обраховувати площу та об’єм різноманітних об’єктів.
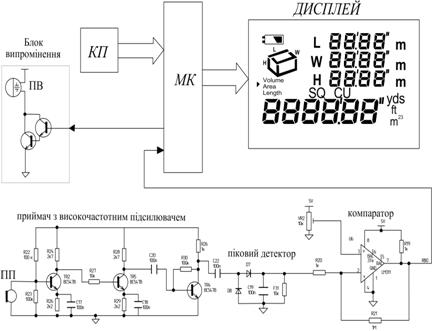
Рис.3.10. Схема ультразвукового віддалеміра:
ПП – п’єзоприймач, ПВ – пє’зовипрмінювач,
КП – кнопочний пульт, МК – мікроконтролер
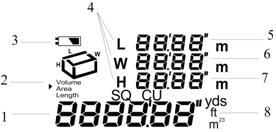
Рис.3.11. Дисплей ультразвукового віддалеміра у збільшеному вигляді:
1 – рядок індикації результуючого вимірювання, 2 – покази режиму вимірювання, 3 – індикатор стану джерела живлення, 4 – позначення сторін об’єкту при вимірюванні площі і об’єму, 5 – рядок індикації віддалі L (при першому вимірюванні), 6 – рядок індикації ширини W (при другому вимірюванні), 7 – рядок індикації висоти H (при третьому вимірюванні), 8 – одиниці вимірювання
- Оптична локація
Є два основні способи реалізації локаційного методу: імпульсний та модуляційний (фазовий). В першому способі застосовується випромінювання у вигляді коротких імпульсів, а в другому – безперервне модульоване випромінювання, фаза якого містить інформацію про вимірювану відстань. На рис. 3.12 наведені спрощені принципові схеми оптичних локаційних світловіддалемірів, основаних на використанні імпульсного (рис.3.12 а) та модульованого (рис. 3.12 б) випромінювань.
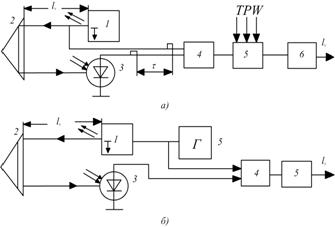
Рис. 3.12. Спрощені схеми оптичних локаційних світловіддалемірів на основі імпульсного (а) та модульованого (б) випромінювань
В імпульсних локаторах випромінювання у вигляді короткого імпульсу від джерела випромінювання – лазера 1 спрямовується на об’єкт 2, відстань до якого вимірюється. Відбитий від об’єкта імпульс приймається оптоелектронним чутливим елементом 3. Інтервал часу, протягом якого імпульс проходить подвійну вимірювану відстань, визначається вимірювачем інтервалів часу 4. Якщо відома швидкість розповсюдження променя, то вимірювана відстань  визначається за допомогою обчислювального пристрою 5 за відомою формулою
визначається за допомогою обчислювального пристрою 5 за відомою формулою  і безпосередньо відраховується відліковим пристроєм 6.
і безпосередньо відраховується відліковим пристроєм 6.
Швидкість розповсюдження електромагнітного випромінювання, зокрема оптичного, в повітряному середовищі визначається за формулою  , де
, де  - швидкість світла у вакуумі;
- швидкість світла у вакуумі;  - показник заломлення світла в середовищі, який залежить від його температури, тиску та вологості.
- показник заломлення світла в середовищі, який залежить від його температури, тиску та вологості.
У сучасних високочастотних світловіддалемірах одночасно з вимірюванням відстаней здійснюються допоміжні вимірювання метеорологічних параметрів середовища (температури  , тиску
, тиску  та вологості
та вологості  ) в декількох точках вздовж вимірюваної відстані, результати яких вводяться в мікропроцесор 5 для уточнення значення швидкості світла в даному середовищі в момент вимірювання відстані. Цей спосіб надзвичайно трудомісткий і використовується лише при дуже точних метрологічних вимірюваннях відстаней до декількох кілометрів, наприклад, в установках для відтворення одиниці довжини на ділянці 50... 1000 м.
) в декількох точках вздовж вимірюваної відстані, результати яких вводяться в мікропроцесор 5 для уточнення значення швидкості світла в даному середовищі в момент вимірювання відстані. Цей спосіб надзвичайно трудомісткий і використовується лише при дуже точних метрологічних вимірюваннях відстаней до декількох кілометрів, наприклад, в установках для відтворення одиниці довжини на ділянці 50... 1000 м.
Інший спосіб уточнення швидкості світла у цьому середовищі полягає у використанні двохвильового дисперсійного методу, при якому показник заломлення визначають, вимірюючи відстані при двох різних довжинах хвиль із застосуванням двочастотного лазера. Цей спосіб використовується в світловіддалемірах для точних вимірювань великих відстаней (до сотень км).
У фазових (модуляційних) локаційних віддалемірах (рис. 3.12 б) використовується неперервне випромінювання лазера 1, модульоване за інтенсивністю синусоїдним сигналом з частотою  від генератора 5. Як інформативний параметр для визначення часу проходження променем подвійної вимірюваної відстані приймається кут фазового зсуву між напругою на виході приймача випромінювання 3 та модулювальною напругою, який вимірюється за допомогою фазометра 4 і здійснюється на частоті модуляції:
від генератора 5. Як інформативний параметр для визначення часу проходження променем подвійної вимірюваної відстані приймається кут фазового зсуву між напругою на виході приймача випромінювання 3 та модулювальною напругою, який вимірюється за допомогою фазометра 4 і здійснюється на частоті модуляції:
 , (3.14)
, (3.14)
де  та
та  - фази коливань відповідно в моменти часу
- фази коливань відповідно в моменти часу  та
та  ;
;  - повна кількість фазових циклів;
- повна кількість фазових циклів;  - кут фазового зсуву в границях неповного фазового циклу; - частота генератора.
- кут фазового зсуву в границях неповного фазового циклу; - частота генератора.
Вимірювана відстань визначається в обчислювальному пристрої 5 за формулою
 . (3.15)
. (3.15)
Отже, при вимірюваннях фазовими локаційними віддалемірами відстаней, більших від половини довжини хвилі модуляційного сигналу, необхідно визначити повну кількість фазових циклів і кут фазового зсуву в границях неповного (останнього) циклу. Частота модуляції лежить, звичайно, в межах від 10 до 100 МГц.
За допомогою оптичної локації та лазерів відстань від Землі до відбивачів, установлених на Місяці, була визначена з точністю до 2...6 см, тобто з похибкою меншою за  .
.
Для вимірювання малих відстаней (від метра до долі мікрометра) застосовують лазерні інтерферометри.
На рис.3.13 представлено лазерний прилад для вимірювання переміщення деталей.
Лазер випромінює світловий потік  , який поділяється на два потоки
, який поділяється на два потоки  і
і  з допомогою напівпрозорого нахиленого дзеркала 4. Потік відбиваючись від дзеркала 4, а потім від дзеркала 5, попадає на фотоелемент 3. Потік проходить через дзеркало 4, відбивається від об’єкту 1, потім від дзеркала 4 і попадає на фотоелемент 3. В фотоелементі 3 потоки складаються.
з допомогою напівпрозорого нахиленого дзеркала 4. Потік відбиваючись від дзеркала 4, а потім від дзеркала 5, попадає на фотоелемент 3. Потік проходить через дзеркало 4, відбивається від об’єкту 1, потім від дзеркала 4 і попадає на фотоелемент 3. В фотоелементі 3 потоки складаються.
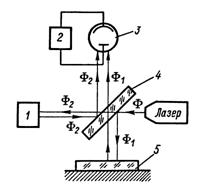
Рис.3.13. Лазерний прилад для вимірювання переміщення деталей
При зміні відстані до об’єкту інтенсивність сумарного потоку буде змінюватись, що викликає модуляцію фотоструму. Число підрахованих з допомогою лічильника 2 періодів  фотоструму і переміщення деталі на відстань
фотоструму і переміщення деталі на відстань  пов’язані співвідношенням
пов’язані співвідношенням
 , (3.16)
, (3.16)
де  - довжина хвилі світла (
- довжина хвилі світла (  ).
).
При зміні відстані до 1м похибка становить 0,1-1,0 мкм.
Запитання для самоконтролю
1. Методи вимірювання відстані між об’єктами.
2. Акустична локація.
3. Аналіз принципової схеми ультразвукового віддалеміра.
4. Оптичні локаційні віддалеміри на основі імпульсного та модульованого випромінювань.
5. Лазерний прилад для вимірювання переміщення деталей.
Вимірювання тиску
Дата добавления: 2018-06-27; просмотров: 649; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!