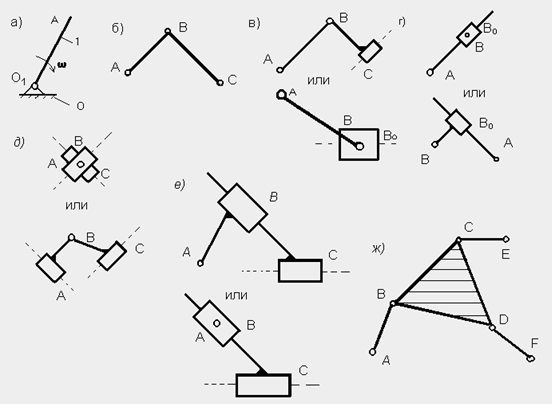
Разновидности (модификации) 2-х поводковых групп.
Группой Ассура называется кинематическая цепь, которая в случае ее присоединения элементами внешних пар к стойке получает нулевую степень подвижности, т.е. образует ферму. Группа Ассура характеризуется классом, порядком и видом.
Класс группыАссура определяется максимальным классом контура входящего в группу. Класс контура– наибольшее число кинематических пар образующих в группе замкнутый контур. Если группа Ассура образована двумя звеньями ей в качестве исключения присваивается 2-й класс.
Порядок группы Ассура определяется числом кинематических пар, которыми она присоединяется к основному механизму.
Вид группы Ассура (её характеристика) определяется соотношением входящих в неё вращательных и поступательных кинематических пар. Поводкомназывается звено, входящее в группе в две кинематические пары, одна из которых свободная и служит для присоединения к одному из подвижных звеньев механизма или к стойке. Порядок структурных групп определяется числом поводков.
Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп. Особенность структурных групп Ассура - их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая конструкция. Используя группы Ассура удобно проводить структурный, кинематический и силовой анализ механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 2-го класса 2-го порядка.
Задачи и методы кинематического анализа механизмов.
Кинематический анализ механизмов состоит в определении движения его звеньев по заданному движению начальных звеньев.
Основные задачи:
· определение положений звеньев и траекторий отдельных точек;
· определение линейных скоростей и ускорений точек и угловых скоростей и ускорений звеньев;
· определение передаточных функций или отношений между звеньями.
Методы кинематического анализа:
· графический – основан на графическом дифференцировании и интегрировании.;
· аналитические – в общем случае сложны и требуют громоздких вычислений.
4 Избыточные звенья и связи в механизмах.
Механизм без избыточных связей можно собрать без натягов при любых неточностях изготовления, что уменьшает силы трения в кинематических парах и увеличивает срок службы и надежность механизма. Такой механизм легко приспосабливается к деформации основания.
W+S=6
Уравнение позволяет определять число активных связей s через число степеней свободы w и наоборот
Число степеней свободы любого механического объекта будет равно минимальному количеству координат, замораживание которых лишает объект подвижности относительно выбранной системы отсчёта его движений.
Активные связи делятся на активные и пассивные связи для механизма. Первые- необходимые, вторые избыточные.
Избыточными связями называют такие связи, удаление которых не увеличивает числа степеней свободы механизма.
Последовательное удаление радиальных связей также не увеличивает число степеней свободы, из чего следует что эти связи тоже избыточные. Оставшиеся связи необходимы или их удаление уже послужит увеличению числа степеней свободы.
Q=W+S-6N
Устранение избытков связей одноконтурных механизмов
Алгебраический метод
Метод деформации звеньев
Дата добавления: 2018-06-01; просмотров: 327; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!