Система автоматического управления автомобилем
К традиционной трансмиссии добавляются устройства для управления двигателем, сцеплением, переключением передач и тормозами, которые вместо водителя производят по командам ЭБУ необходимые действия. Такой автомобиль является своего рода роботизированной системой. В этой системе управление переключением передач производится воздействием на механизмы включения сцепления и переключения передач, на дроссельную заслонку и т. п. соответственно электромагнитной муфтой, гидравлическим исполнительным устройством трансмиссии и шаговым двигателем.
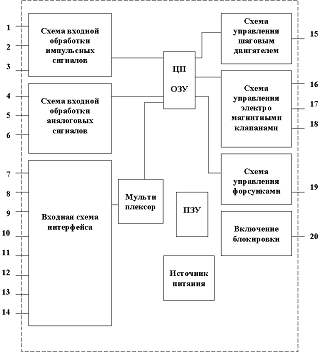
На рисунке 11.54 показана блок-схема системы, а на рисунке 11.55 — блок-схема ее ЭБУ.
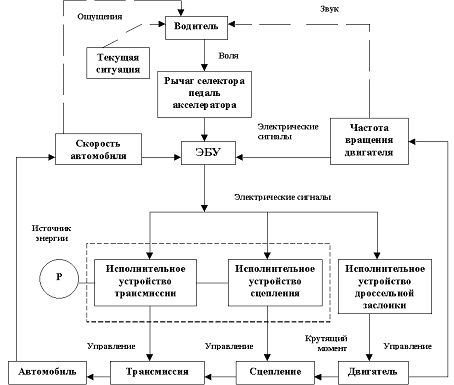
Рис. 11.54 Система автоматического управления трансмиссией («Исудзу»)
1. Датчик включенной передачи
2. Датчик частоты вращения коленчатого вала двигателя
3. Датчик частоты вращения выходного вала
4. Датчик положения педали акселератора
5. Датчик включения сцепления
6. Датчик температуры охлаждающей жидкости
7. Положение шестерен
8. Рычаг селектора
9. Концевой выключатель дроссельной заслонки
10. Концевой выключатель педали акселератора
11. Выключатель кондиционера воздуха
12. Концевой выключатель тормоза
13. Выключатель режима движения с заданной скоростью
14. Выключатель освещения
15. Шаговый двигатель управления положением дроссельной заслонки
16. Сцепление
17. Коробка передач
18. HSA (устройство для движения на крутых уклонах)
19. Форсунки
20. Реле блокировки
Рис. 11.55 Схема ЭБУ системы автоматического управления
Автомобиля («Исудзу»)
Бесступенчатая трансмиссия
Ряд фирм проводит разработки трансмиссий с непрерывно изменяемым передаточным отношением, обеспечивающим как трогание, так и изменение скорости движения с минимальной к максимальной. Основные элементы системы (электромагнитная муфта и клиноременный вариатор с использованием стальных ремней) управляются по сигналам ЭБУ. Они обеспечивают плавное изменение передаточного отношения при малых потерях, отсутствии толчков и ударов. Распространение таких систем, позволяющих одновременно достичь хороших тягово-скоростных свойств автомобиля и высокой топливной экономичности, ожидается в ближайшие годы.
Управление ходовой частью
Управление подвеской
Подвеска, рассматриваемая в настоящем разделе, - это совокупность узлов, которые размещаются между рамой или кузовом автомобиля и мостами. Подвеска содержит рессоры, амортизаторы, стабилизаторы и т. п. Они предназначены для уменьшения колебаний кузова из-за неровностей на поверхности дороги, повышения комфортабельности и обеспечения безопасности движения. Вообще говоря, свойства комфортабельности и безопасности взаимосвязаны. Например, мягкие рессоры повышают комфортабельность, но из-за увеличения возможного смещения центра тяжести автомобиля снижают безопасность движения. С другой стороны, жесткие рессоры повышают безопасность, но снижают комфортабельность, передавая даже самые незначительные неровности дороги.
При проектировании подвески учитывают оба этих свойства и в зависимости от характера транспортного средства осуществляют их согласование. Более того, используя электронную технику, предусматривают управление параметрами подвески в соответствии с условиями движения.
Проектирование такой подвески начинают с разработки системы управления высотой кузова автомобиля относительно поверхности дороги, затем разрабатывают систему управления сопротивлением амортизаторов и, наконец, систему управления жесткостью подвески. В последней системе используют одновременно узлы регулирования высоты и узлы изменения сопротивления. Поэтому ее называют комплексной системой управления подвеской. В системах повышенной комфортабельности предусматривают управление опорами двигателя по аналогии с управлением подвеской. Масса двигателя составляет существенную долю в общей массе автомобиля. Для того чтобы колебания и вибрации двигателя не передавались на шасси автомобиля, используют противовибрационную резину и амортизаторы.
При управлении опорами двигателя с помощью электроники регулируют их характеристики (сопротивление и т. п.) в соответствии с положением автомобиля, обеспечивая тем самым еще больший эффект управления. В основном принципы управления опорой двигателя совпадают с принципами управления подвеской.
12.1.1 Управление сопротивлением амортизаторов
При движении автомобиль испытывает толчки от поверхности дороги. Эти толчки гасятся рессорами и из-за отдачи возникают продолжительные колебания, которые, как показано на рисунке 12.1, демпфируются амортизаторами.
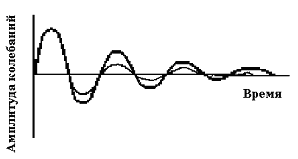
Рис. 12.1 Колебания кузова без амортизаторов (сплошная линия) и с амортизаторами (тонкая линия).
Амортизатор состоит из цилиндра со специальной жидкостью, поршня и отверстия. Во время сжатия, вызванного наездом на препятствие и колебаниями кузова автомобиля, за счет поглощения энергии жидкостью, проникающей через отверстие, возникает усилие сопротивления. Если диаметр отверстия амортизатора достаточно мал, т. е. при большом сопротивлении продолжительность демпфирования будет невелика, но толчки будут поглощаться слабо, что ухудшит комфортабельность. С другой стороны, при большом диаметре отверстия (малом сопротивлении), колебания будут более продолжительными, но сцепление шин с дорогой ухудшится.
Характерной особенностью амортизаторов является увеличение сопротивления с ростом скорости движения поршня. Скорость поршня составляет примерно 0,08 м/с при перемещении по хорошей асфальтовой дороге и 0,2 - 0,3 м/с - по грубой мостовой, т. е. с ухудшением дорожного покрытия скорость поршня увеличивается.
При проектировании амортизаторов сначала целесообразно определить с помощью различных оценок и испытаний в разнообразных дорожных условиях желаемые значения силы сопротивления. Для плохих дорог следует отдавать предпочтение комфортабельности, снижая сопротивление, а для хороших - безопасности движения. Решить задачу совмещения двух свойств с использованием обычной подвески, имеющей только один режим работы, довольно трудно. В связи с этим вводится управление силой сопротивления - ее многоступенчатое изменение в соответствии с условиями движения.
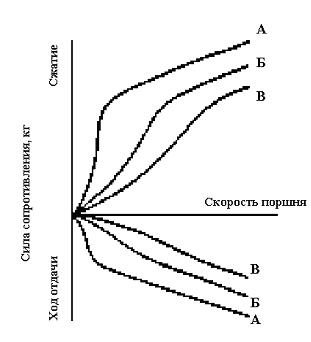
На рисунке 12.2 показана характеристика амортизатора с непрерывным управлением силой сопротивления и тремя режимами ее работы.
А - большое сопротивление, Б - среднее сопротивление; В - малое сопротивление
Рис. 12.2 Зависимость силы сопротивления амортизаторов от скорости поршня для трех режимов работы
Обладая такой характеристикой, даже при небольшой скорости поршня за счет увеличения демпфирующей силы можно предотвратить подъем, «оседание» задней части и крен кузова, возникающие при торможении, ускорении и на поворотах. Это позволяет уменьшить изменение положения кузова автомобиля и повысить безопасность движения.
Приводы и амортизаторы
Привод устанавливается на амортизаторе и приводит в действие управляющий стержень, который составляет единое целое с клапаном, изменяющим силу сопротивления амортизатора.
Привод состоит из двигателя постоянного тока, зубчатой передачи и соленоида (рисунок 12.3).
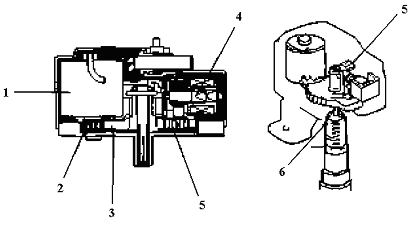
1 - электродвигатель; 2 - ведущее зубчатое колесо; 3 - зубчатый сегмент; 4 - соленоид; 5 - стопор; 6 - управляющий стержень
Рис. 12.3 Исполнительный механизм: общий вид (справа) и в разрезе (слева)
Изменением токов, проходящих через двигатель и соленоид, осуществляется 3-ступенчатое переключение силы сопротивления. Ток пропускается в течение 150 мс только при переключении. Если ток протекает только через двигатель, то зубчатый сегмент в соответствии с полярностью тока двигается влево или вправо, а если ток проходит и через двигатель, и через соленоид, то зубчатый сегмент занимает промежуточное положение.
В амортизаторе, как показано на рисунке 12.4, поворотный золотник имеет три отверстия, а стержень поршня - два пропускных отверстия.
Привод, вращая поворотный золотник, открывает или закрывает отверстие, т. е. уменьшает или увеличивает площадь сечения перепускного канала. В результате обеспечивается переключение на один из трех режимов работы подвески (малая, средняя или большая сила сопротивления).
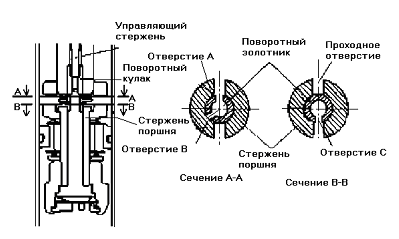
Рис. 12.4 Конструкция амортизатора.
При малой силе отверстия А и С поворотного золотника открыты, при средней - открыто отверстие В, а при большой - закрыты все отверстия. Такая конструкция работает как невозвратный клапан.
Датчик положения рулевого колеса вырабатывает сигналы, пропорциональные углу и направлению поворота рулевого колеса. Хотя существуют различные аналоговые датчики, ниже приведен датчик цифрового типа, использующий так называемый фотопрерыватель.
Фотопрерыватель представляет собой полупроводниковый прибор, содержащий пару из светоизлучающего диода и фототранзистора. В зависимости от наличия или отсутствия излучения светодиода фототранзистор открыт или закрыт.
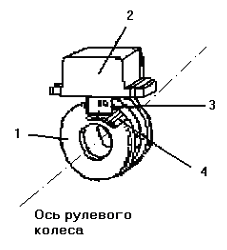
Датчик положения рулевого колеса содержит, как показано на рисунке 12.5, фотопрерыватель и диск с прорезями, который помещается между светодиодом и фототранзистором фотопрерывателя.
1 - диск рулевого управления 2 - корпус датчика; 3 - фотопрерыватель; 4 - прорези
Рис. 12.5 Датчик положения рулевого колеса
Фотопрерыватель устанавливается на рулевой колонке, а диск - на валу рулевого колеса. При повороте рулевого колеса диск вращается, и фототранзистор попеременно открывается и закрывается (переходит в состояние пропускания тока или отсечки). В результате появляется цифровой сигнал, содержащий информацию об угле поворота рулевого колеса. Однако при использовании только одного фотопрерывателя сигналы поворота влево и вправо оказываются одинаковыми, поэтому для обнаружения направления необходимы два фотопрерывателя.
Направление определяется при этом по разности фаз сигналов фотопрерывателей. Описанный датчик имеет 20 прорезей, что соответствует углу в 18°.
12.1.2 Управление высотой кузова автомобиля
При изменении числа пассажиров и массы груза изменяется расстояние между кузовом и поверхностью дороги (клиренс). Управление высотой кузова позволяет стабилизировать это расстояние, что повышает безопасность движения. Поддержание высоты постоянной дает возможность также уменьшить изменение положения оптической оси светового пучка фар. Более того, сохраняется неизменным ход рессор и предотвращается касание элементов кузова о грунт при движении по плохой дороге.
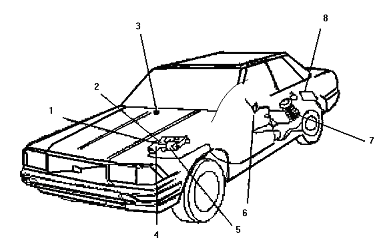
1 - реле; 2 - двигатель компрессора; 3 - индикаторная лампа; 4 - фильтр-водоотделитель; 5 - компрессор; 6 - датчик высоты; 7 - амортизатор; 8 – ЭБУ
Рис. 12.6 Пример системы управления высотой автомобиля («Тойота»)
Уменьшая на высокой скорости высоту, можно повысить безопасность движения и уменьшить сопротивление воздуха.
Управление высотой производится обычно с помощью пневматических упругих элементов.
Структура системы
Управление высотой может осуществляться на всех четырех колесах или только на двух задних.
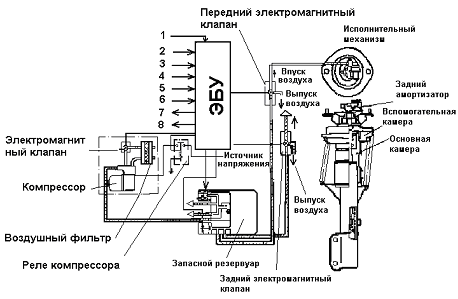
На рисунке 12.7 показан пример системы управления двумя колесами. Сигнал от датчика высоты поступает в ЭБУ. При отличии текущей высоты от номинальной ЭБУ, управляя компрессором или выпускным клапаном, регулирует давление в упругих элементах и поддерживает высоту постоянной. Компрессор работает от малогабаритного двигателя, источником напряжения для которого служит аккумуляторная батарея. При необходимости увеличения высоты компрессор по сигналу от ЭБУ посылает сжатый воздух в фильтр-водоотделитель. Фильтр представляет небольшую камеру, наполненную силикагелем, и предназначен для удаления влаги из проходящего воздуха. Кроме того, в камере имеется клапан для выпуска воздуха из системы при уменьшении высоты. Это позволяет одновременно с выпуском воздуха удалить и влагу, поглощенную силикагелем. Упругие элементы составляют с амортизаторами единую конструкцию, в которой изменение давления воздуха в упругих элементах приводит к изменению высоты амортизаторов.
В системе, показанной на рисунке, применены гидравлические амортизаторы и упругие элементы.
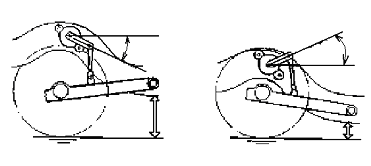
Рис. 12.7 Положение рычага датчика высоты при высоком (слева) и низком (справа) положениях кузова.
Датчик высоты устанавливается на шасси автомобиля и имеет шарнирно закрепленный рычаг, который соединен с рычагом заднего амортизатора. При изменении высоты рычаг датчика, как показано на рисунке 12.7, перемещается вверх или вниз. Датчик содержит два фотопрерывателя, аналогичные тем, которые использованы в датчике положения рулевого колеса, причем фотопрерыватели смещены относительно друг друга по периметру диска, соосного с рычагом датчика. Комбинация сигналов двух фотопрерывателей позволяет определить четыре состояния высоты автомобиля. Такой датчик очень удобен для цифровых схем, поскольку выдает импульсные сигналы, и в отличие от аналоговых не требует преобразователя.
12.1.3 Комплексное управление подвеской
Выше были описаны системы управления силой сопротивления амортизаторов и высотой автомобиля. Кроме этого, находят применение системы управления жесткостью подвески, в качестве которой обычно используют пневматическую или гидропневматическую подвеску. Чем меньше жесткость подвески, тем меньше колебания кузова и выше комфортабельность. Жесткость пневматической подвески можно сделать достаточно малой, однако это повлечет за собой появление крена и продольных колебаний. По этой причине управление жесткостью подвески в большинстве случаев комбинируют с управлением высотой кузова и силой сопротивления амортизаторов.
Структура системы
На рисунке 12.8 показан пример системы управления силой сопротивления и жесткостью подвески.
1. Передний датчик высоты
2. Переключатель режимов «автоматический/ручной»
3. Датчик высоты
4. Датчик положения рулевого колеса
5. Датчик ускорения G
6. Датчик степени открытия дроссельной заслонки
7. Сигналы для внешних средств диагностики
8. Индикаторная лампа режима
Рис. 12.8 Пример системы управления жесткостью подвески (показано управление только передними колесами) («Мицубиси»).
Принцип и функции управления в основном такие же, как при управлении силой сопротивления.
Сигналы от датчиков скорости автомобиля, угла поворота рулевого колеса, ускорения, угла открытия дроссельной заслонки поступают в ЭБУ, который одновременно регулирует жесткость подвески и силу сопротивления. Управление жесткостью осуществляется изменением эффективного объема за счет открывания или закрывания клапана, установленного между вспомогательной и основной камерами пневматической подвески; управление силой сопротивления производится изменением площади сечения отверстия.
Одновременность переключения достигается тем, что управляющий стержень, проходящий через амортизатор, поворачивается исполнительным механизмом, управляемым электромагнитным клапаном.
Дата добавления: 2018-05-31; просмотров: 799; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!