Настройка внутреннего контура систем управления.
 ξ=
ξ= 
Расчет параметров настроек привода главного движения металлорежущего станка.

 – электромагнитная постоянная двигателя
– электромагнитная постоянная двигателя
Тя>T=0,01
Крт - коэффициент усиления по току.
Трт – время регулирования  регулятора тока.
регулятора тока.
Рассмотрим стандартную методику П - регулятора.
Основывается на том, что обратной связью по противо-ЭДС можно пренебречь.


Если это неравенство выполняется, то обратной связью по противо-ЭДС можно пренебречь, если не выполняется, то нельзя.
Трт = Тя


Кт – коэффициент усиления датчика тока.
Подставим в передаточную функцию замкнутой системы Wзт(s)

Приравняем
Подставим найденные параметры настроек регулятора в передаточную функцию замкнутой системы:
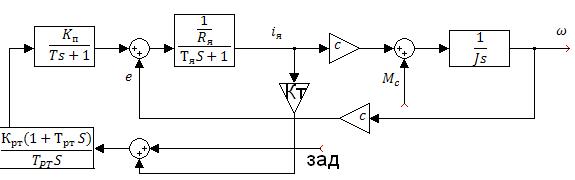
Моделирование системы подчиненного управления
Приводом главного движения станка.
Процедура оптимальной настройки системы управления
1) Проверка возможности пренебрежения обратной связи по противо-ЭДС
2) Расчет оптимальных параметров настройки П - регулятора контура тока
3) Моделирование контура тока с введённым элементом отсечки по току
4) Расчёт оптимальных параметров настройки П – регулятора контура скорости: 
5) Моделирование контура скорости
Система управления с релейной системой
Передаточная функция рассогласования:

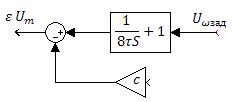
Настройка контура скорости.
Коэффициент регулятора П – регулятора скорости и времени регулирования этого регулятора выбираются из условия получения передаточной функции замкнутой системы привода, имеющей максимально плоскую АЧХ третьего порядка:

Передаточная функция замкнутой системы будет равна:
Если приведённые параметры настроек регулятора подставить в передаточную функцию разомкнутой системы, а последнюю затем подставить в передаточную функцию замкнутой системы, то мы получим передаточную функцию замкнутой системы привода:

Тема 10 Моделирование нелинейных многоконтурных САУ
Системы управления с переменной структурой.
Релейно-форсирующие системы
§1. Основные понятия о фазовом пространстве.
Основное назначение фазового пространства – анализ свободного движения линейной системы относительно положения равновесия. Поэтому выходной величиной системы является отклонения системы от положения равновесия. Представляет собой рассогласование системы.
Для системы n-ного порядка фазовое пространство представляет собой n-мерное пространство с осями

§2. Основные принципы синтеза СПС (системы с переменными структурами)
Для синтеза СПС в фазовом пространстве синтезируется плоскость, проходящая через начало системы координат

Напишем уравнение системы второго порядка

 ;
; 
Плоскость переключения должна обладать следующими свойствами:
1) изображающая точка должна попадать на плоскость переключения из её любого положения на фазовом пространстве
2) фазовые траектории в окрестности плоскости переключения должны быть направлены к ней
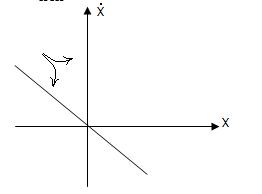
Рис.1
3) Алгоритм переключения системы управления должен обеспечивать нахождение изображающей точки в окрестности плоскости переключения.
§3 Пример релейно-форсирующей систем электропривода с асинхронным двигателем.
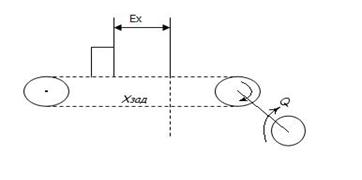
Рис.2
Уравнение движения привода
ρ-радиус приведения
Статическая характеристика
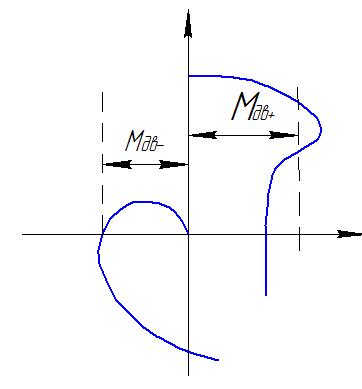
Рис.3
Возможны 3 варианта уравнений:






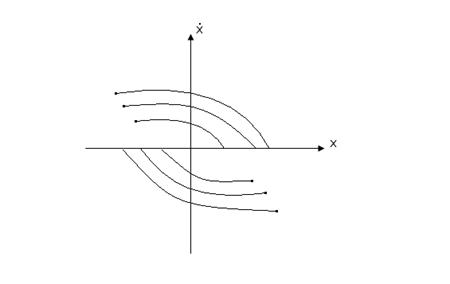
Получим фазовый портреты этой системы
∆М-постоянная для каждого из 3-х режимов
Выразим из первого уравнения время

И подставим во второе уравнение
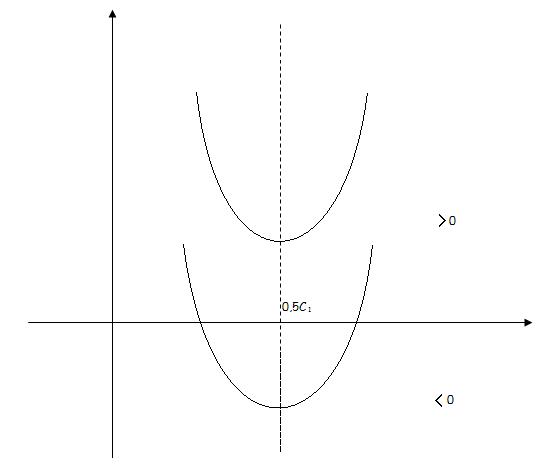
Рис.4
 < >0
< >0
Алгоритм вспомогательной под системы
Перестроим эту кривую в фазовой плоскости
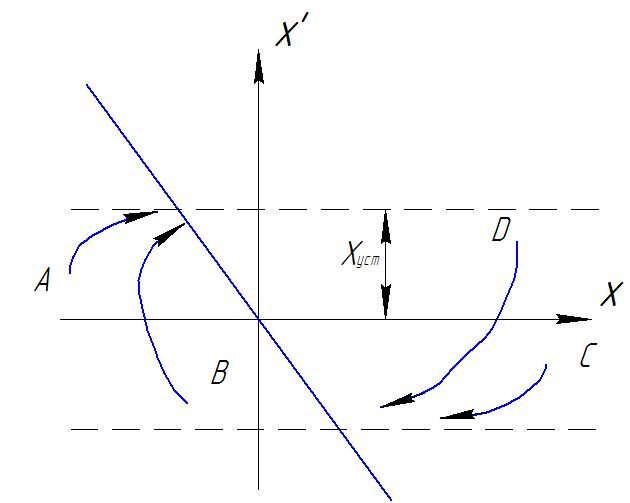
Рис.6
Больше чем эти установившиеся скорости привод развить не может.
Для точки А М=1; х<0; С<0
Для точки В М=1; х<0; С<0
Для точки С М=-1; х<0; С>0
Для точки D М=-1; х>0; С>0
Задача 2 обеспечение движение по линии передвижения
Алгоритм форсирующей релейной системы
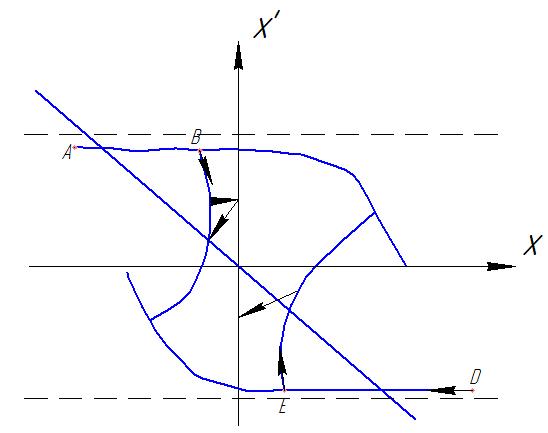
Рис.7
1) т.А х<0 c<0 μ=0
2) т.B x<0 c>0 μ=1
3) т.C x>0 c>0 μ=0
4) т.D x>0 c<0 μ=1
Задача 2 обеспечения движения по линии переключения
 M=0
M=0
Рис.8
M=1
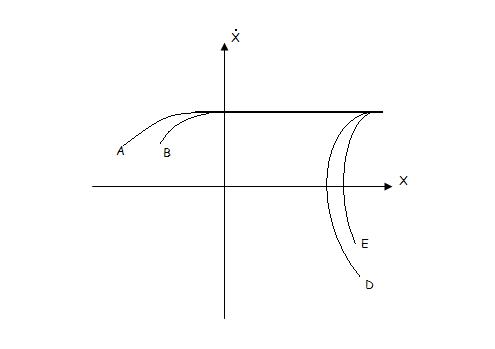
Рис.9
M=-1
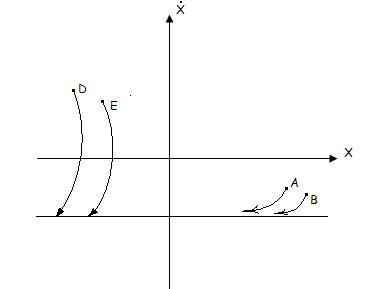
Рис. 10
Устойчивость РФС
Условие при котором изображенная точка попала на линию переключения.
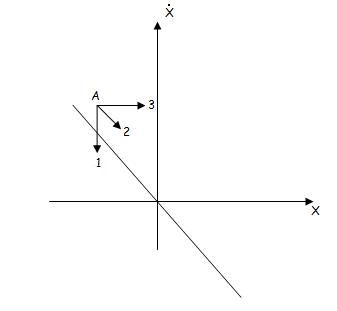
Рис.11
Фазовая траектория в окрестности линии переключения может быть направлена к линии переключения параллельно ей, и направлена от неё.
Чем определяется крутизна линии фазовых траекторий. Она определяется величиной производной 
 >а
>а
 >a
>a
 >a
>a
Предельные значения коэффициента наклонной линии переключения в курсовом проекте провести повыше приведенной методике
Рассмотрим другой случай
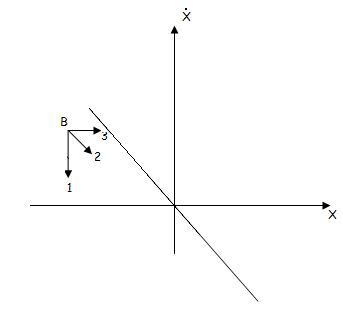
Рис.12
 <a , если С<0
<a , если С<0
Выполнить самостоятельно при разработке курсового проекта.
Дата добавления: 2018-05-31; просмотров: 296; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!