Экспресс идентификация математической модели объекта.
1) Структурная идентификация.
2) Параметрическая идентификация.
 (1)
(1)
 (2)
(2)

 рис.1
рис.1
 (3)
(3)
В начале рекомендуется выделить чистое запаздывание.
 (4)
(4)
Предварительное значение Т0 определяется следующим образом, проводится касательная из начало координат к переходной функции.
 рис.2
рис.2
Наилучший результат такой идентификации достигается путём вольирования параметров  и Т0 таким образом, чтобы абсолютное значение наибольшей отрицательной и положительной погрешности стали бы одинаковыми.
и Т0 таким образом, чтобы абсолютное значение наибольшей отрицательной и положительной погрешности стали бы одинаковыми.
Метод идентификации Аликперова.
Исходными данными для идентификации математической модели является переходный процесс объекта управления заданный графиком, либо заданный таблично но в дальнейшем изображённый графичеки.
 рис.3
рис.3
Входным воздействием желательно иметь скачкообразное воздействие.
Основная идея Аликперова заключается в аппроксимации кривой переходного процесса следующей функции:
 (5)
(5)
Количество слагаемых определяется неравенством:
 (6)
(6)
Дальше пользуются формальным понятием передаточная функция.
 рис.4
рис.4
 (7)
(7)
 (8)
(8)
 (9)
(9)
Преобразование Лапласа это линейный оператор.
 (10)
(10) 



Определение параметров d и K:
 (11)
(11)
Рекомендация: передаточную функцию объекта представлять в виде суммы
 (12)
(12)
Технология метода Аликперова.
|
|
|
1. Определение времени чистого запаздывания.
По графику определяем время чистого запаздывания и сдвигаем время на величину чистого запаздывания.
 (13)
(13)
2. Используем в качестве аппроксимирующей функции скачкообразную функцию a*1(t)
a- определяется точно
 (14)
(14)
Определяем невязку первого приближения
 (15)
(15)
 рис.5
рис.5
3. Аппроксимация невязки первого приближения экспонентой.
При аппроксимации экспонентой следует стремиться к максимально точному совпадению невязки первого приближения и экспоненты в последней третьей невязки первого приближения.
Для второго случая надо достичь достаточно точного совпадения невязки первого приближения с аппроксимирующей экспонентой на участке от экстремума невязки первого приближения до конца его переходного процесса.
Формальная процедура определение параметров  и
и  . Если мы прологарифмируем аппроксимирующую экспоненту, то получим линейную функцию.
. Если мы прологарифмируем аппроксимирующую экспоненту, то получим линейную функцию.
 (16)
(16)
Если мы прологарифмируем невязку первого приближения, то получим следующий график.
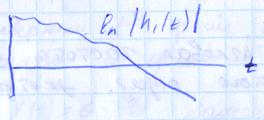 рис.6
рис.6
Прямая проводится так, чтобы она наилучшим образом совпадала бы с логарифмом невязки первого сопряжения.
Отрезок которая отсекает эта линия на оси ординат равна  , а коэффициент наклона этой линии равен величине
, а коэффициент наклона этой линии равен величине  .
.
|
|
|
4. Построение невязки второго приближения:
 (17)
(17)
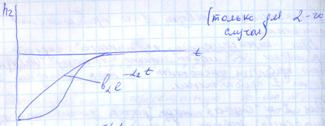 рис.7
рис.7
 (18)
(18)
5. Первой определяется угловая частота аппроксимирующей синусоиды. Для этого определяется экстремум невязки (визуально).
 рис.8
рис.8
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (21)
(21)
 (22)
(22)
Определение параметра .
На графике определяется момент первого экстремума и его значений, и момент второго экстремума и его значений.
 (23)
(23)
 (24)
(24)
§3. Идентификация ММ обьекта с формальным использованием интегрального преобразования Лапласа.
Исходными данными являются: функция изменения входного воздействия во времени.
1.µ(t)


Рисунок 1.Функция изменения выходного воздействия.

Интеграл от свертки двух функций, а именно функция которую преобразуем и функция  .
.
Пусть функция

В этом методе идентификации структура ММ принимается:
Пусть ПФ объекта  структурно представлена в виде дробно рациональной функции.
структурно представлена в виде дробно рациональной функции.
Основная задача идентификации в определении коэффицентов ММ по результатам натурального эксперимента.


Пусть переменная s=c (действительное число)
|
|
|




Получилось линейное алгебраическое уравнение:


Величину следует выбирать так, чтобы отношение интегралов сверток A(c) существенно зависело от этой величины.
В таком случае несобственный интеграл функции будет существенно зависеть от величины t.

Рисунок 2.
Т - длительность переходного процесса
Т1 – длительность импульса

Если с очень мало

с должно находиться в следующем размерном ряду:

Если на переходном процессе выходной величины явно видно запаздывание , то его следует учесть звеном чистого запаздывания и тогда переходная функция будет иметь вид:

Рисунок 3.
Звено чистого запаздывания легко определяется и легко моделируется, но тяжело реализуется.
Минимальное значение величины с должно быть таким, чтобы  было несколько отлично от 0 при t=T.
было несколько отлично от 0 при t=T.
Пусть

Рекомендации по принятию значения величины С.
 принимается равной
принимается равной 
 принимается равной
принимается равной 
Остальные значения значения величины С принимаются путем разбиения интервала  на участки равной длины.
на участки равной длины.
После определяем отношение интервалов сверток при этих величинах, подставить полученные значения в систему уравнений и решить эту систему уравнений.
После того как получен коэффициент, сравнивают переходный процесс экспериментально полученной кривой.
|
|
|
В результате сравнения возникает абсолютная погрешность идентификации.
Если она не происходит максимально допустимую, то процесс идентификации на этом останавливают.
Если превосходит, то усложняют структуру ММ.









Тема 9 Моделирование линейных многоконтурных САУ
Системы управления с компенсацией возмущения



Если объект управления может информационно разбит на 2 части.
Системы каскадного регулирования

Во внутренний контур входит одно динамическое звено
Очень часто при управлении приводами, задающее воздействие в приводах изменяется по гармоническому закону, которое необходимо воспроизвести с максимальной динамической точностью.



S=200 мм/мин


Максимально плоская АЧХ (могут быть для звеньев со 2-го порядка)

Максимально плоской АЧХ соответствует коэффициент демпфирования, равный 
Передаточная функция для звена второго порядка
Передаточная функция для звена третьего порядка с МАХ АЧХ

В ТАУ полученные передаточные функции звеньев с максимально плоской АЧХ до 9-го порядка.


Внутренние контура каскадных систем всегда настраивают на максимальное быстродействие, при этом получена максимально плоские АЧХ.
Для фильтрации замкнутых сигналов используют фильтры с максимально плоской АЧХ(фильтры Чебышева и Батерворда).
Дата добавления: 2018-05-31; просмотров: 812; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!