Решение обратной задачи кинематики
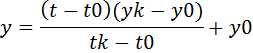
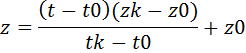
Требуется решить обратную задачу кинематики при движении схвата по заданной прямой в пространстве с учетом рабочей зоны( прямая задана конечными точками в пространстве с координатами (0,15; -0,4; 0,55)и (0,9;-0,8;1,05). Для начала найдем уравнение прямой в пространстве. Уравнение прямой в пространстве по двум точкам имеет вид:
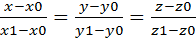
Выполним подстановку известных координат:

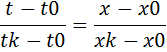
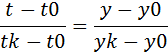
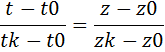
Выведем зависимость от времени:
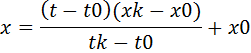


X= 
Y= 
Z= 

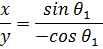
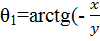
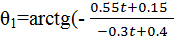
θ1=-arctg (  )
)
θ1=arctg (  )
)
х = 












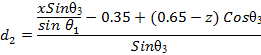
d2=  - 0.35sin
- 0.35sin 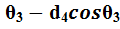
 )
)
 )
)
d4= 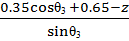
d4= 
d2=  - 0.35sin
- 0.35sin 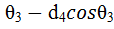
d2= 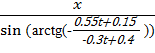 - 0.35sin
- 0.35sin
Построим графики, полученные в результате моделирования в среде MatLab:
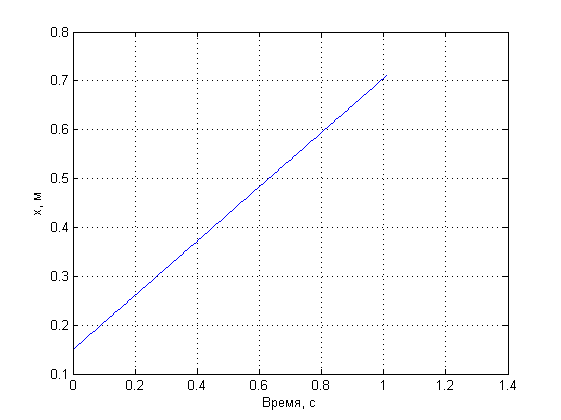
Рисунок 7-Зависимость координаты х от времени t
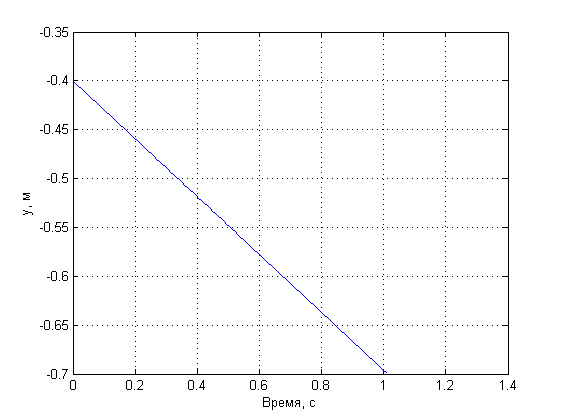
Рисунок 8-Зависимость координаты y от времени t
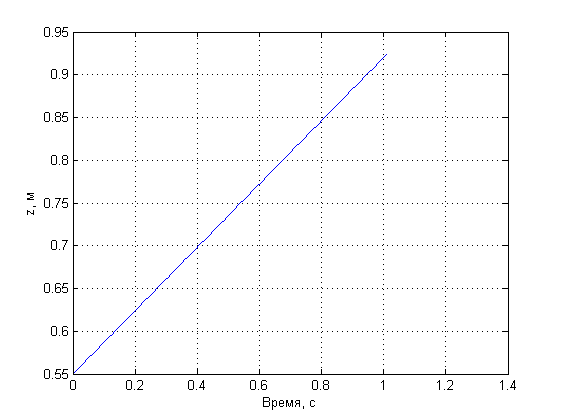
Рисунок 9-Зависимость координаты z от времени t
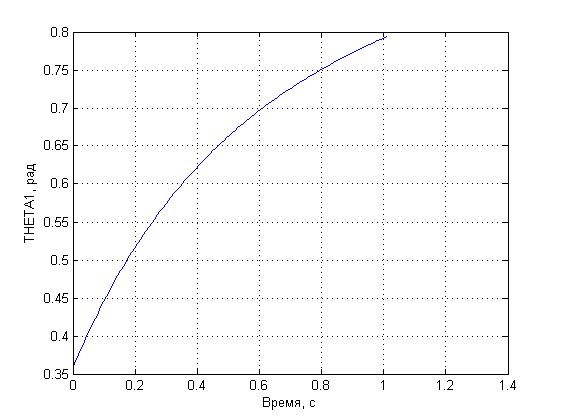
Рисунок 10-Зависимость обобщённой координаты  от времени t
от времени t
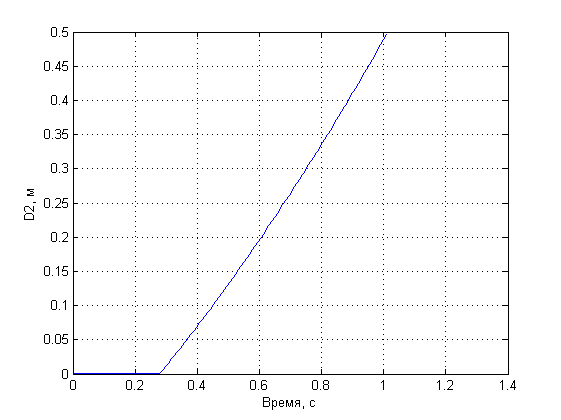
Рисунок 11-Зависимость обобщённой координаты d2 от времени t
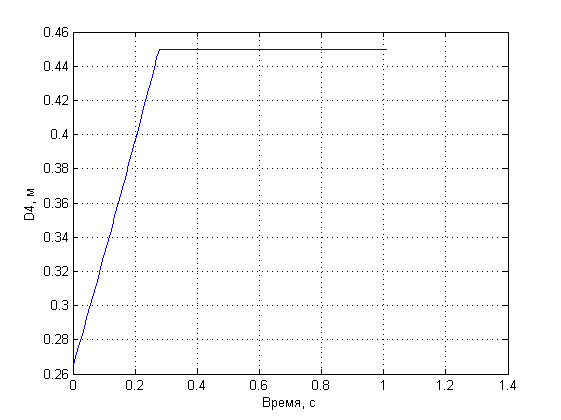
Рисунок 12-Зависимость обобщённой координаты d4 от времени t
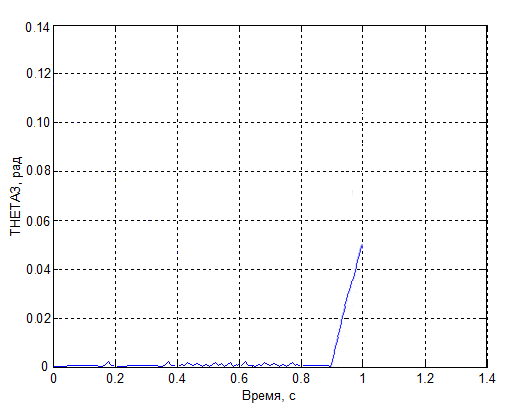
Рисунок 13-Зависимость обобщённой координаты θ3 от времени t
Приложение 1
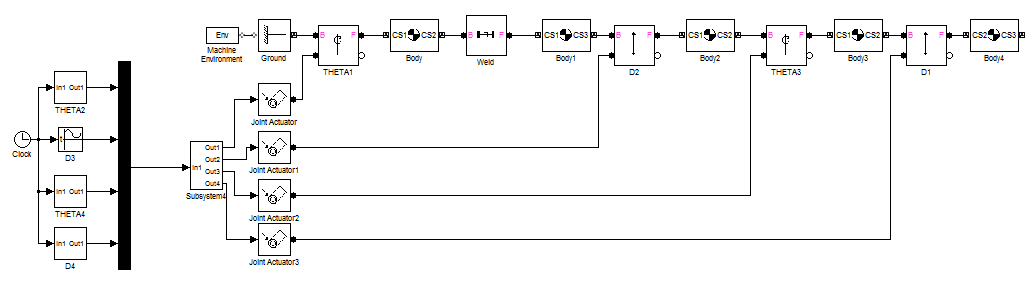
Рисунок 14-Модель Simulink четырехзвенного манипулятора для прямой задачи
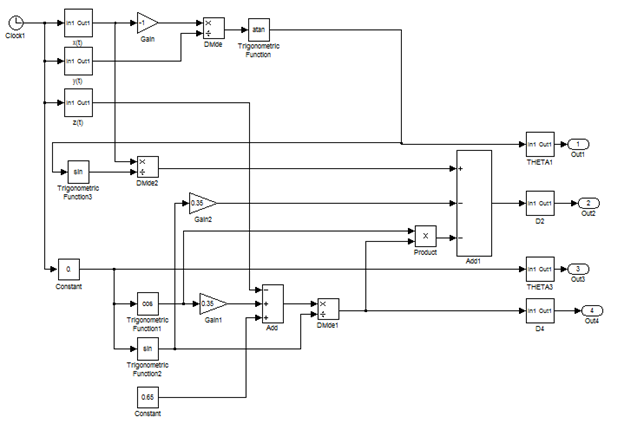
Приложение 2
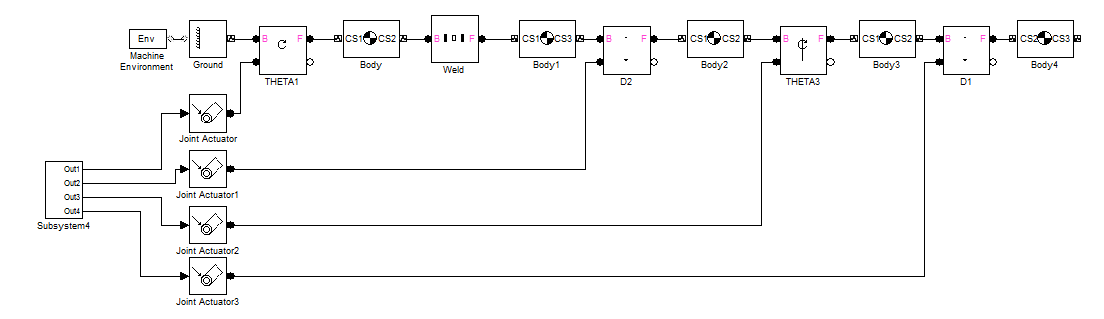
Рисунок 15-Модель Simulink четырехзвенного манипулятора для обратной задачи
Приложение 3
|
|
|
Вывод: в проделанной курсовой работе я определил параметры манипулятора по представлению Денавита-Хартенберга (система координат, параметры звеньев и сочленение).
Сформировал однородные матрица преобразований для всех переходов системы координат.
Решил прямую задачу кинематики по заданным значениям присоединенных координат с реализацией в среде SimMechanics.
Определить рабочую зону манипулятора.
Решил обратную задачу кинематики при движении схвата по заданной прямой в пространстве с учетом рабочей зоны.
Дата добавления: 2018-06-27; просмотров: 474; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!