Определение рабочей зоны манипулятора
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ
Кафедра : «Управление техническими системами»
Курсовая работа
Расчет кинематических параметров манипулятора и моделирование в среде SimMechanics
Выполнил: студент гр.МР-09-1
Солдатов М.Р.
Проверил: профессор д.т.н.
Круглов С.П.
Иркутск 2013
Оглавление
Задание. 3
Определение систем координат. 5
Определение параметров четырехзвенного манипулятора. 6
Однородные матрицы преобразований. 7
Решение прямой задачи. 8
Определение рабочей зоны манипулятора. 10
Решение обратной задачи кинематики. 11
Приложение 1. 18
Приложение 2. 19
Приложение 3. 20
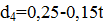
Задание
В задании указана кинематическая схема 4-хзвеного манипулятора.
1. Определить параметры манипулятора по представлению Денавита-Хартенберга (система координат, параметры звеньев и сочленение).
2. Сформировать однородные матрица преобразований для всех переходов системы координат.
3. Решить прямую задачу кинематики по заданным значениям присоединенных координат с реализацией в среде SimMechanics. Продолжительность моделирования-1сек. Реализовать визуализацию.

 2
2
4. Определить рабочую зону манипулятора.
5. Решить обратную задачу кинематики при движении схвата по заданной прямой в пространстве с учетом рабочей зоны. Провести прямую между точками с координатами (x,y,z):
A=(0,15; -0,4; 0,55)
B=(0,9; -0,8; 1,05)
Реализовать в среде SimMechanics. Считать что звенья тонкие прутья (1м=10 кг).
|
|
|
6. Оформить работу (исходное задание, расчеты, результаты моделирования, графики, выводы, анимации).
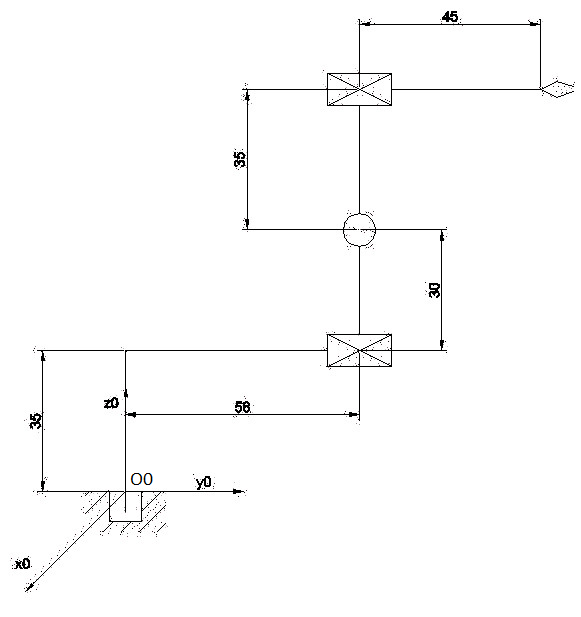
Рисунок 1-Схема четырехзвенного манипулятора
Определение систем координат
Для каждого звена сформируем ортонормированную систему координат. 
Рисунок 2-Системы координат каждого звена
Определение параметров четырехзвенного манипулятора
Определим расстояния между звеньями:
 1=0.35
1=0.35
2=0.58 (данная величина переменная)
3=0
4=0.45( данная величина переменная)
Определим длины звеньев:
 1=0
1=0
2=0.3
3=0.35
4=0
Определим углы поворотов звеньев:


 ( данная величина переменная)
( данная величина переменная)

Определим углы скрутки:




Однородные матрицы преобразований
Так как параметры звеньев известны, сформируем однородные матрицы преобразований, для системы координат каждого звена.


Найдем матрицу преобразования  :
:
 =
= 

Решение прямой задачи
Из условий известно, что обобщенные координаты изменяются по следующим законам:


 2
2

Необходимо решить прямую задачу кинематики, время моделирования 1 сек, шаг моделирования 0,01 сек. Координаты возьмем из однородной матрицы преобразования .
|
|
|
X= 
Y= 
Z= 
Построим графики, полученные в результате моделирования в среде MatLab:
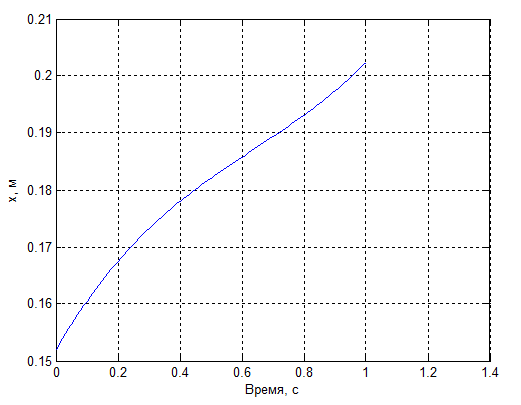
Рисунок 3-Зависимость координаты х от времени t
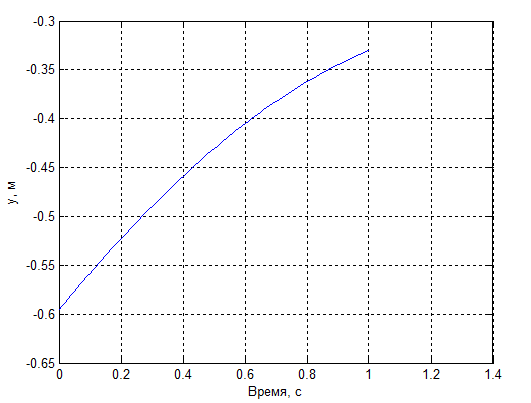
Рисунок 4-Зависимость координаты y от времени t
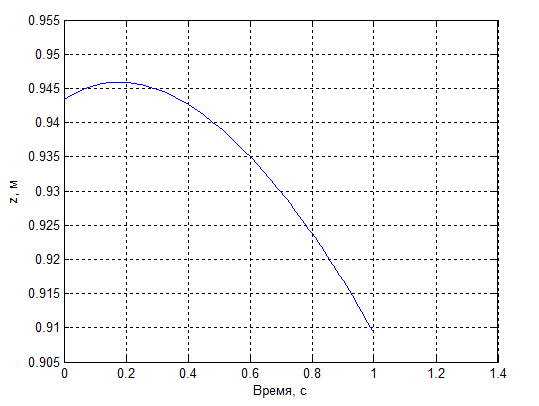
Рисунок 5-Зависимость координаты z от времени t
Определение рабочей зоны манипулятора
Первая обобщенная координата является вращательной, значит рабочая зона является телом вращения.

Рисунок 6-Рабочая зона манипулятора
Дата добавления: 2018-06-27; просмотров: 755; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!