Дифференциальное уравнение САР
Получив передаточные функции замкнутой системы по задающему воздействию  и возмущающему фактору
и возмущающему фактору  , структурную схему САР, представленную на рис. 3 можно изобразить (см. рис. 8).
, структурную схему САР, представленную на рис. 3 можно изобразить (см. рис. 8).
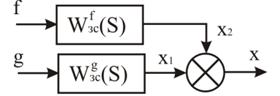
Рис. 8. Структурная схема САР
Запишем уравнение выходного сигнала САР в изображении S как,
 (7)
(7)
Где G(s) и F(s) изображения задающего g(t) воздействия и возмущающего фактора f(t).
Введем обозначения  и запишем (7):
и запишем (7):
 (8)
(8)
где А(s), B(s) , C(s) – полиномы изображения s



Тогда (8) примет вид:

Если знаменатель передаточной функции САР A(s) приравнять к нулю, получим характеристическое уравнение:
 (9)
(9)
Решая данное уравнение, определяются корни характеристического уравнения s1, s2,… sn-1, sn . Переходя от изображений сигналов к их оригиналам и, заменяя  , получим дифференциальное уравнение САР:
, получим дифференциальное уравнение САР:
 (10)
(10)
Оценка устойчивости САР по корням характеристического уравнения системы
Решением дифференциального уравнения (10) при известных g(t), f(t) является закон изменения выходной регулируемой величины X(t). Вся теория автоматического управления базируется на использовании передаточных функции САУ. Следовательно, чтобы найти переходные процессы, протекающие в САР, необходимо применить к уравнению (7) обратное преобразование
Лапласа:
 (11)
(11)
|
|
|
Если интегралы (11) являются неберущимися, то для определения переходного процесса используется формула Хэвисайда:

(12)
где: U0 – амплитуда входного воздействия;  – значение производной знаменателя передаточной функции при значении si все; n – количество корне характеристического уравнения системы .
– значение производной знаменателя передаточной функции при значении si все; n – количество корне характеристического уравнения системы .
Из уравнения (12) можно отметить, что время t и корни характеристического уравнения входят в показатель экспоненты.
Корни характеристического уравнения системы (рис. 9) могут быть вещественными (корень S1), комплексно - сопряженными (S2 ,S3 ,S7 ,S8 ), мнимыми (S5 ,S6) . Кроме того, корни могут располагаться: в левой полуплоскости, в правой либо на оси ординат и, соответственно, будут левыми, правыми либо нулевыми.
Система будет устойчива, если переходный процесс при  стремится к установившемуся значению X
стремится к установившемуся значению X  =Xуст. А это значит, что показатель экспоненты уравнения (12) должен быть отрицательным , то есть все корни характеристического уравнения системы должны располагаться в левой полуплоскости Si – корней (рис. 9).
=Xуст. А это значит, что показатель экспоненты уравнения (12) должен быть отрицательным , то есть все корни характеристического уравнения системы должны располагаться в левой полуплоскости Si – корней (рис. 9).
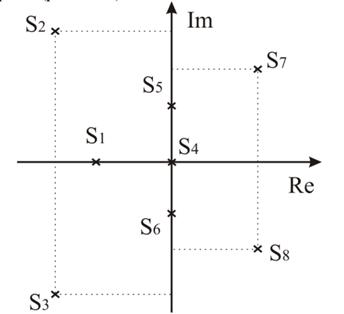
Рис.9. Расположение Si корней характеристического уравнения
|
|
|
Для того, чтобы САР была устойчивой необходимо и достаточно чтобы все корни характеристического уравнения системы были левыми. Если среди корней характеристического уравнения системы есть хотя бы один правы, а остальные левые, то САР является неустойчивой.
Если среди корней характеристического уравнения системы есть хотя бы один нулевой, а остальные левые, то САР является нейтральной , то есть находится на границе устойчивости.
2.3.7 Оценка устойчивости САР с помощью критерия Михайлова
Данный критерий является частотным, и для оценки устойчивости САР необходимо получить уравнение кривой Михайлова. Для этого воспользуемся характеристическим уравнением замкнутой системы (9).
 (13)
(13)
Переходя в частотный диапазон , заменяя  , выделяя вещественную и мнимую составляющие , получим уравнение кривой Михайлова.
, выделяя вещественную и мнимую составляющие , получим уравнение кривой Михайлова.
 (14)
(14)
где  вещественная и мнимая составляющие уравнения кривой Михайлова.
вещественная и мнимая составляющие уравнения кривой Михайлова.
Задавая частотный диапазон, строиться по уравнению (14) в комплексной плоскости кривая Михайлова (см. рис. 10).

Рис. 10. Кривые Михайлова , построенные для n=1, n =2, n =3, n =4
Для того, чтобы САР была устойчивой необходимо и достаточно выполнение следующих условий:
|
|
|
- при  годограф кривой Михайлова должен начинаться на положительной вещественной оси ;
годограф кривой Михайлова должен начинаться на положительной вещественной оси ;
- при изменении частоты до  годограф кривой Михайлова должен:
годограф кривой Михайлова должен:
· поочередно;
· нигде не обращаясь в ноль;
· в положительном (против часовой стрелки) направлении;
· пройти n квадрантов.
Если годограф кривой Михайлова при конкретной частоте , не равной нулю, проходит через начало координат, то система является нейтральной.
При невыполнении хотя бы одного из сформулированных условий система является неустойчивой.
2.3.8 Оценка устойчивости САР с помощью критерия Найквиста
Данный критерий является частотным, и для оценки устойчивости САР необходимо воспользоваться передаточной функцией разомкнутой системы и, переходя в частотный диапазон, заменяя , построить годограф АФЧХ разомкнутой системы. Особенностью данного критерия является то, что по виду годограф АФЧХ разомкнутой системы оценивается устойчивость САР в замкнутом состоянии.
Система автоматического управления в разомкнутом состоянии может быть устойчивой либо неустойчивой или нейтральной. Поэтому существует два подхода в оценке устойчивости системы.
|
|
|
I. Подход. Система в разомкнутом состоянии устойчивая.
Если система в разомкнутом состоянии устойчивая, то для того, что бы она была устойчивой и в замкнутом состоянии, необходимо и достаточно чтобы годограф АФЧХ разомкнутой системы не охватывал точку с координатами [-1; j0].
Если годограф АФЧХ разомкнутой системы охватывает точку с координатами
[-1; j0], то система в замкнутом состоянии является не устойчивой.
И, если годограф АФЧХ разомкнутой системы проходит через точку с координатами [-1; j0], то система в замкнутом состоянии является нейтральной, то есть находится на границе устойчивости.
На рис. 11 для годографа 1 САУ в замкнутом состоянии является устойчивой, для 2 – нейтральной, для 3 – неустойчивой.
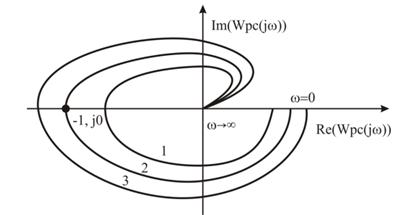
Рис. 11 Годографы АФЧХ разомкнутой системы
II. Подход. Система в разомкнутом состоянии является неустойчивой или нейтральной.
В данном случае, в характеристическом уравнении разомкнутой системы среди левых корней имеется хотя бы один правый корень или нулевой.
Если система в разомкнутом состоянии является неустойчивой или нейтрально, то для того, что бы она была устойчивой и в замкнутом состоянии, необходимо и достаточно чтобы годограф АФЧХ разомкнутой системы охватывал точку с координатами [-1; j0] в положительном направлении К/2 раз, где К – количество правых или левых корней.
На рис. 12 изображен годограф АФЧХ неустойчивой разомкнутой системы, которая имеет один правый корень.

Рис. 12 Годограф АФЧХ разомкнутой системы при К=1
Годограф АФЧХ охватывает точку с координатами [-1; j0] в положительном направлении 0,5 раза, следовательно, система в замкнутом состоянии является устойчивой.
2.3.9 Критический коэффициент САР. Критерий Гурвица
Под критическим (граничным) коэффициентом ККР системы автоматического регулирование понимается то значение коэффициента разомкнутой системы КРС , когда САР в замкнутом состоянии является нейтральной. Для определения значения критического коэффициента ККР системы можно использовать любой из критериев устойчивости. В данном случае рассмотрим использование критерия Гурвица для определения ККР.
Для этого необходимо воспользоваться характеристическим уравнением замкнутой системы:

Из коэффициентов уравнения составляется главный определитель Гурвица,
опираясь на следующие правила:
· По главной диагонали определителя Гурвица располагаем коэффициенты характеристического уравнения, начиная с а1 ;
· Столбцы определителя заполняются коэффициентами относительно главной диагонали : вверх с возрастающими, вниз - с убывающими индексами;
· Вместо отсутствующих коэффициентов ставятся нули.
Остальные определители Гурвица составляются из главного определителя,
путем выделения количества строк (столбцов), равных порядковому номеру определителя.

Для того чтобы система была устойчивой необходимо и достаточно чтобы
все определители Гурвица были положительными.
Если хотя бы один определитель меньше нуля, то система является неустойчивой.
И, если хотя бы один определитель равен нулю, а остальные больше нуля, то система является нейтральной.
Согласно последней формулировки, для определения значения критического коэффициента ККР системы достаточно воспользоваться предпоследним определителем, и приравняв его к нулю, находим значение ККР .
2.10 Построение области устойчивости в плоскости параметров системы
Использование критериев устойчивости не позволяет получить ответ: «В каких пределах можно варьировать параметры системы, сохранив ее устойчивость?».
Данную задачу решил Нейморк, и этот метод вошел в теорию автоматического управления, как: «Построение области устойчивости в плоскости параметров системы».
Метод является графоаналитическим и позволяет определить пределы варьирования одного или двух параметров системы.
Суть метода. Изменяя параметры системы в определенной последовательности, можно выбрать те комбинации параметров, когда корни характеристического уравнения системы являются нулевыми (расположены на оси ординат). На рис. 13 точки 1,2,3…m являются той комбинацией параметров M и N, когда хотя бы одна пара из корней характеристического уравнения системы (13) является мнимой. Соединив точки, получаем кривую, которая называется – кривая D-разбиения.

Рис. 13 Кривая D – разбиения в плоскости параметров C и D
Кривая D-разбиения разбивает плоскость параметров M и N на области с различным содержанием левых и правых корней. Та область, где все корни характеристического уравнения системы являются левыми, претендует на область устойчивости. Для выявления области устойчивости используется штриховка кривой D-разбиения. Исходным уравнением для построения область устойчивости является характеристического уравнения замкнутой системы, которое содержит варьируемые параметры M и N.
Рассмотрим алгоритм построения области устойчивости в плоскости одного
параметра системы N.
1. В характеристическом уравнении замкнутой системы выявляется варьируемый параметр N.
2. Выражается данное уравнение относительно варьируемого параметра N.
3. Переходя в частотный диапазон, заменяя , выделяя вещественную и мнимую составляющие, получаем уравнение кривой D-разбиения  .
.
4. Задавая частоту до , строим одну ветвь кривой D-разбиения и при  до 0 – другую ветвь.
до 0 – другую ветвь.
5. Нанося штриховку на ветви кривой D-разбиения, выделяем область устойчивости .
6. Из области устойчивости выбираем пределы варьирования параметра N.
7. Для выбранного значения N, и, используя любой критерий устойчивости,
выполняем проверку найденной области.
2.11 Переходная характеристика системы и показатели качества процесса
регулирования
Качество работы любой системы регулирования характеризуется количественными и качественными показателями, которые определяют непосредственно по кривой переходного процесса либо по другим динамическим характеристикам системы . Переходный процесс в системе является ее реакцией на внешнее воздействие, которое в общем случае может быть сложной функцией времени. Обычно рассматривают поведение системы при следующих типовых воздействиях: единичной ступенчатой функции  , импульсной
, импульсной  функции и гармонической функции. Чаще всего прямые оценки качества такие, как характер переходного процесса, время регулирования (
функции и гармонической функции. Чаще всего прямые оценки качества такие, как характер переходного процесса, время регулирования (  ) и перерегулирование (
) и перерегулирование (  ) получают по кривой переходной характеристики
) получают по кривой переходной характеристики  , т.е. при воздействии единичной ступенчатой функции .
, т.е. при воздействии единичной ступенчатой функции .
На характер переходного процесса влияют как числитель, так и знаменатель передаточной функции. Если передаточная функция замкнутой системы не имеет нулей, т.е. вида:
 (15)
(15)
то характер переходного процесса полностью определяется корнями характеристического уравнения замкнутой системы:
 (16)
(16)
Если корни характеристического уравнения (16) вещественные  , то характер переходного процесса апериодический, рис. 14.
, то характер переходного процесса апериодический, рис. 14.
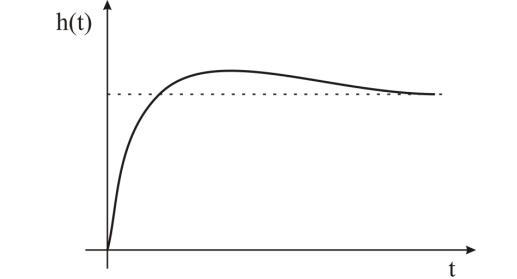
Рис. 14. Апериодический переходный процесс
Если корни вещественные и комплексно-сопряженные и комплексных корней много больше вещественных, то характер переходного процесса колебательный (периодический), рис. 15.

Рис. 15 Колебательный переходный процесс
Если корни вещественные и комплексно- сопряженные и комплексных корней меньше вещественных, то характер переходного процесса монотонный (рис. 16).

Рис.16 Монотонный переходный процесс
Если один из корней находится в плоскости si - корней на оси ординат, а остальные в левой полуплоскости – переходный процесс колебательный с постоянной амплитудой и частотой. Система находится на границе устойчивости.
Если корни характеристического полинома замкнутой системы отрицательные, находятся в левой полуплоскости, то такую систему принято считать устойчивой.
Если хотя бы один из корней находятся в правой полуплоскости а остальные в левой, то такую систему принято считать неустойчивой.
Склонность системы к колебаниям характеризуется максимальным значением регулируемой величины  (рис. 17) или так называемым перерегулированием –
(рис. 17) или так называемым перерегулированием –  ,%.
,%.

 где
где  – установившееся значение регулируемой величины после завершения переходного процесса.
– установившееся значение регулируемой величины после завершения переходного процесса.
Рис. 17. Показатели качества переходного процесса
Качество процесса регулирования системы считается хорошим, если величина перерегулирования , % не превышает 30%. Быстродействие системы характеризуется длительностью переходного процесса tp . Время регулирования tp (длительность переходного процесса) определяется как время, протекающее от момента приложения на вход системы воздействия до момента, после которого имеет «место» следующее неравенство:

где Δ – малая постоянная величина, представляющая собой заданную точность. В
ТАУ принято задавать Δ = 0,05 [5].
Колебательные переходные процессы характеризуются периодом Тсоб и  частотой собственных колебаний.
частотой собственных колебаний.
Степень устойчивости  представляет собой абсолютное значение вещественной оси до ближайшего корня (либо до пары комплексных корней). Колебательность
представляет собой абсолютное значение вещественной оси до ближайшего корня (либо до пары комплексных корней). Колебательность  представляет собой (см. рис. 18). Время переходного процесса tp и ,% связаны со степенью устойчивости и колебательностью следующими соотношениями:
представляет собой (см. рис. 18). Время переходного процесса tp и ,% связаны со степенью устойчивости и колебательностью следующими соотношениями:

Для более точной оценки tp и ,% по данным соотношениям необходимо, чтобы все корни характеристического уравнения системы были расположены внутри или на границе трапеции в плоскости корней рис. 18.

Рис. 18. Корневые показатели качества
2.3.12 Оценка точности процесса регулирования САР
Исследование точности регулирования систем автоматического управления проводят путем анализа установившихся режимов ее функционирования. То есть, точность регулирования системы оценивается установившимися ошибками, которые в свою очередь определяются структурой системы (передаточными функциями) и воздействиями (задающими воздействиям и возмущающими факторами).
Ошибка регулирования в системах стабилизации.
При оценке точности регулирования систем стабилизации принимается, что
задающее воздействие является постоянным, т.е.  . Полную ошибку регулирования
. Полную ошибку регулирования  для линейной системы, функциональная схема которой приведена на рис. 19, можно представить как,
для линейной системы, функциональная схема которой приведена на рис. 19, можно представить как,

где  – задающее воздействие;
– задающее воздействие;  – выходной сигнал системы.
– выходной сигнал системы.
В области изображений уравнение запишется как
 (17)
(17)
Связь между задающим воздействием , возмущающим фактором  и выходным сигналом системы в области изображений s устанавливается с помощью передаточных функций.
и выходным сигналом системы в области изображений s устанавливается с помощью передаточных функций.
 (18)
(18)
где  – передаточная функция замкнутой системы по задающему воздействию ;
– передаточная функция замкнутой системы по задающему воздействию ;
 – передаточная функция замкнутой системы по возмущающему фактору .
– передаточная функция замкнутой системы по возмущающему фактору .
Для данной системы регулирования (рис. 19) передаточные функции имеют вид:
 (19)
(19)
где  передаточная функция разомкнутой системы;
передаточная функция разомкнутой системы;  – передаточная функция регулятора;
– передаточная функция регулятора;  – передаточная функция объекта.
– передаточная функция объекта.
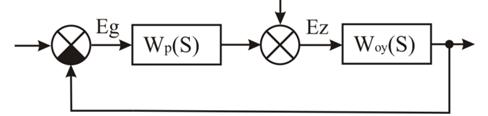
Рис. 19. Структурная схема типовой САР
Подставляя выражения (19), (18) в (17), имеем
 (20)
(20)
где  – передаточная функция замкнутой системы по ошибке регулирования.
– передаточная функция замкнутой системы по ошибке регулирования.
Следовательно, полная ошибка регулирования  состоит из 2 составляющих
состоит из 2 составляющих
 (21)
(21)
где  – ошибка регулирования, вызванная задающим воздействием ;
– ошибка регулирования, вызванная задающим воздействием ;
 – ошибка регулирования, вызванная возмущающим фактором .
– ошибка регулирования, вызванная возмущающим фактором .
Используя выражения (20), (21) и теорему о предельных значениях  , при типовых воздействиях ,
, при типовых воздействиях ,  установившиеся ошибки системы можно определить по следующим выражениям:
установившиеся ошибки системы можно определить по следующим выражениям:
 (22)
(22)
 (23)
(23)
 (24)
(24)
где  – установившееся значение полной ошибки;
– установившееся значение полной ошибки;  – установившееся
– установившееся
значение ошибки, вызванной задающим воздействием;  – установившееся значение ошибки, вызванной возмущающим фактором.
– установившееся значение ошибки, вызванной возмущающим фактором.
Уравнения (22)–(24) являются уравнениями статики, которые в статическом стационарном режиме (  ,
,  ) связывают значения установившихся ошибок регулирования со значениями передаточных функций, определяемых при s=0.
) связывают значения установившихся ошибок регулирования со значениями передаточных функций, определяемых при s=0.
Первую составляющую полной ошибки регулирования в системах стабилизации (  ) можно свести к нулю путем масштабирования. Тогда точность системы регулирования будет полностью характеризоваться статической ошибкой
) можно свести к нулю путем масштабирования. Тогда точность системы регулирования будет полностью характеризоваться статической ошибкой  :
:
3. Примерное содержание курсового проекта
3.1 Примерная тематика курсового проектирования
1 Анализ САР напряжения синхронного генератора
2 Анализ САР температуры в электропечи
3 Анализ САР частоты вращения двигателя постоянного тока
4 Анализ CAP температуры в теплообменник
5 Анализ CAP частоты вращения турбореактивного двигателя
6 Анализ комбинированной CAP частоты вращения двигателя постоянного тока
3.2 Содержание расчетно-пояснительной записки курсового проекта.
1. Введение
2. Дать краткое описание системы автоматического регулирования САР.
3. Используя линейные модели элементов САУ, составить по принципиальной схеме системы функциональную и структурную схемы.
4. Описать принцип регулирования САР.
5. Получить передаточную функцию системы в разомкнутом состоянии Wрс(s). Найти передаточные функции замкнутой системы по задающему воздействию и возмущающему фактору .
6. Записать дифференциальное уравнение САР.
7. Проверить САР на устойчивость по корням характеристического уравнения системы.
8. Проверить САР на устойчивость, используя критерий устойчивости Михайлова
9. Проверить САР на устойчивость, используя критерий устойчивости Найквиста. Определить запасы устойчивости системы по модулю, амплитуде и фазе.
10. Определить по критерию устойчивости Гурвица критический коэффициент усиления разомкнутой системы Крс .
11. Построить область устойчивости в плоскости одного параметра – Крс.
12. Приняв начальные условия нулевыми, построить переходную характеристику системы и определить по ней показатели качества .
13. Определить полную установившуюся ошибку системы.
Примечание: Индивидуальное задание на курсовое проектирование определяется преподавателем в зависимости от темы.
Графическая часть представляется двумя листами чертежей формата А-1.
3.3 Содержание графической части курсового проекта (примерное)
Требования к графическому материалу курсового проекта:
- функциональные и структурную схемы системы должны быть выполнены в соответствии с ЕСКД (ГОСТ 2.702-75, 2.703-63, 2.728-74, 2.3336-78);
- на структурных схемах должны быть проставлены направления движения сигналов с их наименованиями;
- графики должны быть представлены с размерными осями и обязательно с сеткой,
Дата добавления: 2018-05-12; просмотров: 909; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!