Общие характеристики элементов автоматических систем
Любая система автоматики представляет собой совокупность различных элементов(звеньев) одни из которых являются основными, а другие вспомогательными.
Основные элементы, выполняющие в системе те или иные основные функции, их называют основные функциональные элементы. Общим их признаком является передача поступающих на них возмущений в определенном направлении, а так же то или иное преобразования сигнала по величине, но не зависимо от назначения физических принципов, лежащих в основе действия элементов не зависимо от их конструкции все элементы обладают общими характеристиками.
Статические характеристики звеньев
Если входная величина элемента с течением времени не изменяется, режим элемента называют статическим.
Если входная величина элемента изменяется, то это сопровождается соответствующими изменениями выходной величины, в элементе возникает переходной процесс. Такой режим называют динамическим.
В соответствии со статическими или динамическими режимами работе/ элемента различают его статические или динамические характеристики.
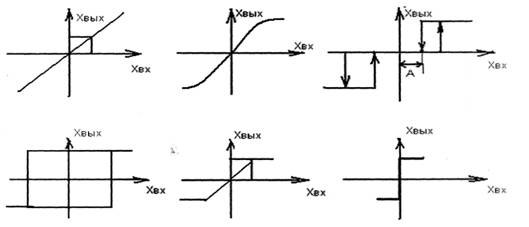
а) Линейная статическая характеристика звена;
б) Не линейная;
в) Релейная с зоной нечувствительности (А);
г) Релейная без зоны нечувствительности;
д) С ограничениями верхнего и нижнего значения выходного сигнала;
е) Идеальное реле.
|
|
Практически многие звенья обладают нестабильностью статической характеристики, обусловленных износу элементов всевозможного рода отложениями в аппарате и т.д. или внешними факторами (температура, давления, влажность) не стабильность выражается в самопроизвольном изменении выходной величины элементов, при неизменной входной величине.
|
|
|
Разность между наименьшим значением Хвых и физическим значением Хвых - абсолютно статическая погрешность.
Линейная статическая характеристика - прямая проходящая под некоторым углом к оси абсцисс. Угол наклона характеристики - есть величина постоянная, а его tg определяет передаточный коэффициент элемента К. Он является важнейшим показателем элемента. Он может иметь ту или иную размерность или быть безразмерной величиной. Применительно к различным функциональным элементам, передаточный коэффициент носит разные названия: ДМ датчиков – чувствительность, усилителей -коэффициент усиления. Для стабилизаторов - величину коэффициент стабилизации. Для преобразователей - коэффициент преобразования.
Линейный элемент обладает постоянным коэффициентом передачу В не линейном - передаточный коэффициент в различных точках характеристики различен и характеризуется tg угла наклона касательной, проведенной в не линейной характеристике интересующей нас точке.
|
|
|
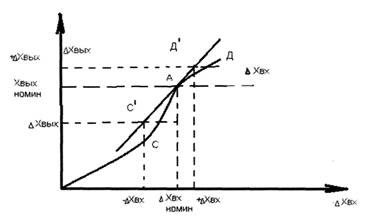
Лианеаризация не линейных характеристик
Выбираем на данной характеристику точке А, которая будет соответствовать задающему режиму работы элемента. С достаточной степенью точности криволинейный отрезок САД заменяется прямолинейным совпадающим с касательной, проведенной в этой кривой в точке А с координатой с «Д» и считается зависимость Хвых =f (Хвх) на этом участке линейной т.е. ΔХвых = К • Хвых
Хвых = f(Xвx), разложим в ряд Тейлора, по стечении малых отклонений в точке А:

Все частные производные берут в точке А, где функция Хвх имеет const значения, по этому коэффициент при Хвх и X2 вх будут постоянны. Кроме того, пренебрегают членами высшего порядка, начиная с X2 вх, тогда уравнение звена запишется:
Хвых а ± ∆Хвых= Хвых а ± К * ΔХвх, где
К= ΔХвых/ΔХвх= (df(Xвx)/дХвх)А
Этого и следовало ожидать, т.к. частная производная трактуется как tga касательной С"Д" в точке А, т.е. чем меньше отклонения от Хвх , тем больше линейная зависимость будет отражать истинную и чем ближе функция Хвых = Хвх к прямой, тем в больших пределах можно допустить линеаризацию. Существенное значение для анализов уравнений системы имеют начальные условия. Наиболее просто выглядит решение при 0 нулевых начальных точках, т.е. когда входная величина = 0 и все ее производные =0.
|
|
|
На практике начальные условия обычно не равны 0 и это усложняет их анализ. При анализе пользуются следующим приемом: принимать установившемся состоянием координатном системы в точке А = 0, т.е. учитывают величину Хвх, а ее отклонения Хвх, кроме того считают что все производные по времени от Хвых = 0.
Эту операцию производят переносом начала координат в точку А.
Математически эта операция производится вычитанием через данного выражения управления установившегося состояния.
Хвых а ± ΔХвых = Хвх а ± КΔХвх
Хвых а == Хвх± ΔХвх = ± КΔХвх
Т.е. теория автоматического регулирования оперирует только малыми отклонениями и эти отклонения связанны между собой линейными зависимостями.
Дата добавления: 2018-05-12; просмотров: 421; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!