Тиристорный преобразователь с 3-фазной полууправляемой мостовой схемой. Отличия от полностью управляемой 3-фазной мостовой схемы.
Тиристорный преобразователь со схемойY/Y-Yс уравнительным реактором. Отличия от 3-фазной нулевой и мостовой схем.
Тиристорный преобразователь с условной 12-фазной схемой. Возможные варианты, достоинства и недостатки по сравнению с мостовой схемой.
Система импульсно-фазового управления ТП. Функциональная схема и принцип работы. Особенности СИФУ для реверсивного ТП.
Транзисторный широтно-импульсный преобразователь. Способы коммутации ключей. Регулировочные характеристики при активно-индуктивной нагрузке.
Релейный регулятор тока. Влияние возмущающих факторов на режим работы. Сравнение с аналоговым ПИ-регулятором тока.
Преобразователи частоты с непосредственной связью, с автономным инвертором тока и с автономным инвертором напряжения. Принцип действия и регулировочные свойства.
Тиристорный преобразователь напряжения переменного тока. Регулировочные свойства и осциллограммы работы.
Сельсинный датчик углового положения. Применение фазочувствительного выпрямителя для расширения рабочего интервала.
Дискретные абсолютные датчики положения. Варианты конструкции, увеличение разрядности, диапазона и точности измерения. Применение кода Грея.
Дискретные инкрементальные датчики положения. Варианты конструкции, увеличение разрядности, диапазона и точности измерения. Определение направления движения и начального положения.
Цифровые датчики скорости. Сравнение способов измерения частоты. Расширение диапазона измерения скорости при заданной точности измерения.
В современных системах АЭП с большими диапазонами регулирования скорости и высокими требованиями к ее стабилизации точность ТГ может оказаться недостаточной. Для таких систем используются цифровые датчики скорости (ЦДС). Функционально в ЦДС можно выделить две основные части: импульсный преобразователь скорости—датчик импульсов ДИ, преобразующий угловую скорость вала в импульсы с частотой f, пропорциональной скорости, и кодовый преобразователь—счетчик импульсов СИ, формирующий на интервале измерения Т цифровой код An выходной величины датчика скорости (рис. 5.27).
Рис. 5.27. Структурная схема цифрового датчика скорости
Рис. 5.28. Кодовый диск фотоэлектрического датчика импульсов
Датчик импульсов может быть выполнен на основе индуктосина или фотоэлектрического кодового диска. В любом варианте датчик импульсов вырабатывает две серии импульсов, сдвинутых по фазе на  , которые используются для определения угловой скорости и ее знака. На рис. 5.28 изображен кодовый диск фотоэлектрического датчика импульсов. На двух дорожках расположены пропускающие свет щели. Свет от источников ИС1 и ИС2 через щели попадает на фотодиоды ВL1 и BL2, которые при этом открыты и пропускают ток. Когда щель выходит из луча света, фотодиоды запирают цепь. При вращении диска с угловой скоростью с ВL1 и BL2 дают чередование максимального и минимального сигналов с частотой
, которые используются для определения угловой скорости и ее знака. На рис. 5.28 изображен кодовый диск фотоэлектрического датчика импульсов. На двух дорожках расположены пропускающие свет щели. Свет от источников ИС1 и ИС2 через щели попадает на фотодиоды ВL1 и BL2, которые при этом открыты и пропускают ток. Когда щель выходит из луча света, фотодиоды запирают цепь. При вращении диска с угловой скоростью с ВL1 и BL2 дают чередование максимального и минимального сигналов с частотой

где  - импульсная емкость кодового диска — число импульсов на один оборот диска.
- импульсная емкость кодового диска — число импульсов на один оборот диска.
Токовый сигнал фотодиода изменяется по форме и амплитуде при изменении скорости вращения. Поэтому для получения стабильных сигналов снеизменными амплитудой и продолжительностью в состав датчика импульсов входит узел формирования выходных импульсов (рис. 5.29). В усилителе У токовый сигнал фотодиода ВL1 усиливается и симметрируется по полярности Uу1. Усилитель, собранный на транзисторах VT1 и VT2 и работающий с использованием положительной связи в релейном режиме, дает на выходе прямоугольные импульсы U1 с постоянной амплитудой, равной Un, но с переменной продолжительностью. Выходной импульс  с неизменными и амплитудой, и продолжительностью t формируется с помощью одновибратора. Диаграмма работы описанного узла приведена на рис. 5.30. Аналогичный узел имеется и для импульсов второй дорожки кодового диска с фотодиодом BL2. Для каждого направления вращения в датчике импульсов имеется свой выходной канал.
с неизменными и амплитудой, и продолжительностью t формируется с помощью одновибратора. Диаграмма работы описанного узла приведена на рис. 5.30. Аналогичный узел имеется и для импульсов второй дорожки кодового диска с фотодиодом BL2. Для каждого направления вращения в датчике импульсов имеется свой выходной канал.
Выделение импульсов на каналах положительной скорости (направление «вперед»,  ) или отрицательной скорости (направление «назад»,
) или отрицательной скорости (направление «назад»,  ) осуществляется логическим узлом (рис. 5.31). На первом выходном канале импульсы
) осуществляется логическим узлом (рис. 5.31). На первом выходном канале импульсы  появляются при таком направлении вращения, при котором сигнал U2 опережает по фазе на
появляются при таком направлении вращения, при котором сигнал U2 опережает по фазе на  сигнал U1, и элемент совпадения И1 открыт для импульсов
сигнал U1, и элемент совпадения И1 открыт для импульсов  . При другом направлении вращения, когда U2 отстает по фазе на отU1,
. При другом направлении вращения, когда U2 отстает по фазе на отU1,
Рис. 5.29. Схема датчика импульсов
Рис. 5.30. Диаграмма формирования выходного сигнала датчика импульсов
Рис. 5.31. Схема разделения по времени импульсов двух каналов в датчике скорости
элемент совпадения И2 открыт для импульсов  ,которые поступают на второй выходной канал
,которые поступают на второй выходной канал  .
.
Формирование цифрового кода на выходе датчика скорости с помощью счетчика может выполняться двояко. На заданном периоде измерения Т счетчик может подсчитывать число импульсов, которое будет характеризовать среднее значение скорости:
 . 5.67
. 5.67
Так как младшему разряду датчика соответствует один импульс, то разрешающая способность ЦДС составляет N : 1, а точность измерения  . Очевидно, дискретность по скорости датчика, об/с, определится величиной
. Очевидно, дискретность по скорости датчика, об/с, определится величиной
 . 5.68
. 5.68
Таким образом, точность ЦДС тем выше, чем больше измеряемая скорость и период измерения. Например, при  импульсов/об,
импульсов/об,  , с погрешность ЦДС составит для
, с погрешность ЦДС составит для  а для
а для  .
.
Увеличение значения Т для уменьшения погрешности при низких скоростях нежелательно, так как при этом возрастает дискретность по времени и увеличивается расхождение между средним и мгновенным значениями скорости, что может затруднить использование ЦДС и системах управления.
Другой вариант формирования цифрового кода скорости состоит в определении интервала времени между двумя импульсами путем подсчета числа высокочастотных опорных импульсов, умещающихся на измеряемом интервале. Данный способ имеет, напротив, максимальную разрешающую способность на самых низких скоростях, когда период следования импульсов максимален и содержит наибольшее число опорных импульсов. Однако высокая точность датчика при низких скоростях относится также лишь к среднему за измеряемый интервал значению скорости. При повышении скорости точность данного ЦДС снижается.
Рассмотренные варианты ЦДС обеспечивают высокую точность измерения скорости, и тем большую, чем продолжительней период измерения. Однако данный период измерения вносит в систему управления с ЦДС дискретность по времени, которая вносит искажения в работу высокодинамичных систем. Поэтому для снижения дискретности по времени в быстродействующих системах с управлением по интегралу сигнала рассогласования интегрирование разности скоростей выполняется подсчетом разности непосредственно числа импульсов с задающего устройства и с датчика импульсов с помощью реверсивного счетчика.
МОДЕЛЬ ИНКРЕМЕНТНОГО ДАТЧИКА.
Из выходных сигналов резольвера создается 6 выходных сигналов, которые используются управлением верхнего уровня для позиционирования. Выходы этих каналов А, В и С (рис.7) и их инверсные сигналы А, В, С .
Модель инкрементного (вырабатывают выходной сигнал, представляющий собой последовательность импульсов прямоугольной формы) датчика выдает 1024 импульса (однотипные импульсы) на один оборот. Они позволяют системе управления позиционированием с помощью импульсного умножителя частоты удваивать или учетверять разрешающую способность. Тем самым можно один оборот двигателя разделить на 4096 импульсов.
Импульсы каналов А и В сдвинуты относительно друг друга на 90 электрических градусов. При движении направо положительные фронты импульсов канала А опережают такие же импульсы канала В и наоборот. Канал С за каждый полный оборот вала двигателя выдает один импульс, который можно использовать как опорный сигнал.
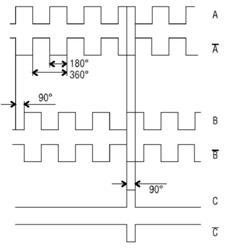
Рис. 7. Моделирование инкрементного датчика
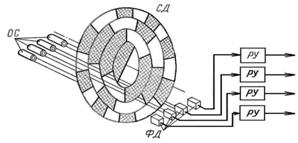
Рис. 14. Фотоэлектрический преобразователь угла поворота в цифровой код
Основным элементом фотоэлектрического датчика является стеклянный диск СД, вал которого соединяется с валом механического устройства. Диск разделен на несколько колец, количество которых соответствует количеству двоичных разрядов числа и определяет точность датчика. На рисунке - число разрядов равно 4. На практике применяют 10 и более разрядов. В свою очередь каждое кольцо разделено на ряд прозрачных и непрозрачных частей. Внутреннее кольцо, соответствующее старшему разряду числа, разделено на две части, из которых одна прозрачная, а вторая непрозрачная. Следующее кольцо разделено на четыре части и т.д. С одной стороны стеклянного диска СД расположены осветители ОС, дающие узкий параллельный пучок света; с другой стороны, против них - фотодиоды ФД. Количество фотодиодов и осветителей равно числу колец диска. Напряжения, снимаемые с фотодиодов, поступают на входы усилителей РУ с релейной характеристикой. Если фотодиод засвечен, то на выходе соответствующего усилителя имеется полное напряжение, что соответствует в цифровом коде +1; если не засвечен - то 0.
Таким образом, каждому углу поворота диска СД соответствует определенная комбинация уровней напряжений на выходах усилителей РУ, т.е. код числа.
ЭНКОДЕРЫ
Энкодеры - преобразователи информации об абсолютном или относительном угловом положении вала в кодовый цифровой сигнал.
Абсолютный энкодер, как правило, отличается наличием уникальной комбинации меток в виде линий или секций переменной угловой ширины для каждого углового положения, а инкрементальный энкодер использует диск, на котором равномерно нанесены однотипные метки (за исключением, индексной), поскольку основная задача инкрементального устройства — детектирование пошагового перемещения с опорой на нулевую (индексную) метку при включении питания.
Энкодеры с большим интервалом между масштабными штрихами (с меньшим количеством штрихов) обеспечивают более высокую частоту выдачи данных, в то время как энкодеры с меньшим интервалом между штрихами (большим количеством штрихов), как правило, имеют более низкие ошибки интерполяции.
Строго говоря, угловыми энкодерами называются преобразователи угловых перемещений, имеющие 10 000 и более масштабных штрихов на оборот, точность которых не хуже 5 угловых секунд, а под «круговыми датчиками» подразумеваются энкодеры, которые не удовлетворяют этим критериям. Вместе с тем, зачастую угловым энкодером называют любой преобразователь угловых перемещений.
При изменении углового положения вала относительно его исходного состояния, инкрементальные энкодеры вырабатывают выходной сигнал, представляющий собой последовательность импульсов прямоугольной формы. Количество импульсов на оборот (разрешающая способность) пропорционально изменению углового положения вала и может достигать 10000 импульсов на один оборот.
Путем обработки сигнала от инкрементального датчика можно получить информацию о текущем значении угла поворота вала относительно опорной индексной отметки (методом последовательных приращений), а также об угловой скорости.
Главным недостатком инкрементальных энкодеров, в сравнении с абсолютными, является потеря инкрементальной угловой информации при сбоях питания (даже в системах с внешним относительно энкодера индексным каналом). Тем не менее, в системах с резервированием подачи питания данный недостаток является несущественным.
Абсолютный энкодер, как правило, отличается наличием уникальной комбинации меток в виде линий или секций переменной угловой ширины для каждого углового положения, а инкрементальный энкодер использует диск, на котором равномерно нанесены однотипные метки (за исключением, индексной), поскольку основная задача инкрементального устройства - детектирование пошагового перемещения с опорой на нулевую (индексную) метку при включении питания. Полученные фотоприемниками световые пучки в дальнейшем обрабатываются переключающей электронной схемой - формирователем выходных импульсов.

Рис. Изображение кодового диска инкрементального энкодераDKS40
Дата добавления: 2018-05-12; просмотров: 403; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!