ПОРЯДОК СИНТЕЗА СИСТЕМЫ АВТОМАТИЗАЦИИ
Программируемые контроллеры
3.1.УПРОЩЕНИЕ ПРОГРАММИРОВАНИЕ ПЛК. ФУНКЦИОНАЛЬНЫЙ СОСТАВ ПЛК
3.2. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК. ЯЗЫКИ ПРОГРАММИРОВАНИЯ. КРАТКИЙ ОБЗОР. ЯЗЫК РКС.
3.3. ПОРЯДОК СИНТЕЗА СИСТЕМЫ АВТОМАТИЗАЦИИ
3.4.ПОДГОТОВКА УПРАВЛЯЮЩЕЙ ПРОГРАММЫ (УП). ПРОГРАММИРОВАНИЕ ПАРАЛЛЕЛЬНЫХ ВЕТВЕЙ
3.5.ТРИГГЕР С ПАМЯТЬЮ RS.
3.6.ПРИСВАИВАНИЕ В FBD.
3.7.СХЕМЫ ПОДКЛЮЧЕНИЯ МОДУЛЕЙ ВВОДА/ВЫВОДА
3.8.ОБЪЕДИНЕНИЕ ФУНКЦИЙ ИЛИ И ИСКЛЮЧАЮЩЕЕ ИЛИ В ОПЕРАТОРЕ И
3.9.ПРОГРАММНЫЕ ЭЛЕМЕНТЫ ТАЙМЕРА В LAD И FBD
3.10 ПРИМЕРЫ БИНАРНЫХ ФУНКЦИЙ. СЛОЖНЫЕ КОМБИНАЦИИ ОПЕРАЦИЙ БИНАРНОЙ ЛОГИКИ. ИНВЕРТИРОВАНИЕ РЕЗУЛЬТАТОВ БИНАРНОЙ ЛОГИКИ
3.11.СЧИТЫВАНИЕ ЗНАЧЕНИЙ ВРЕМЕНИ ТАЙМЕРА. ПРЯМОЕ СЧИТЫВАНИЕ ЗНАЧЕНИЯ ВРЕМЕНИ.
3.12. КОННЕКТОРЫ. КОННЕКТОРЫ В FBD.
3.13. РАБОТА СХЕМЫ С NO И NC КОНТАКТАМИ
3.14. ЯЗЫК SCL. ОПЕРАТОРЫ ЯЗЫКА SCL.
3.15. ТЕКСТОВЫЕ ЯЗЫКИ ПРОГРАММИРОВАНИЯSTLИ SCL.ЛОГИЧЕСКИЙ ШАГ.
3.16.АРИФМЕТИЧЕСКИЕ ОПЕРАЦИИ. +3.17.ПРОГРАМИРОВАНИЕ АРИФМЕТИЧЕСКИХ ОПЕРАЦИЙ.
3.18. ЯЗЫК ПОСЛЕДОВАТЕЛЬНОГО УПРАВЛЕНИЯ
3.19.СЧЕТЧИКИ, ИХ ВИДЫ И ПРОГРАММИРОВАНИЕ.
3.20.ТОПОЛОГИЯ ПРОМЫШЛЕННЫХ КОМПЬЮТЕРНЫХ СЕТЕЙ И ИХ ХАРАКТЕРИСТИКА. ИНТЕРФЕЙС RS-485
3.21. ТОПОЛОГИЯ ПРОМЫШЛЕННЫХ КОМПЬЮТЕРНЫХ СЕТЕЙ И ИХ ХАРАКТЕРИСТИКА. ИНТЕРФЕЙС RS-232С
3.22. ИНТЕРФЕЙС СAN. ТОПОЛОГИЯ СЕТИ.
3.23.ОБЕСПЕЧИТЬ ПОСЛЕДОВАТЕЛЬНОЕ ВКЛЮЧЕНИЕ ДВИГАТЕЛЕЙ М1, М2КНОПКОЙ ПУСК, И ОТКЛЮЧЕНИЕ ИХ В ОБРАТНОМ ПОРЯДКЕ.
3.24. ОБЕСПЕЧИТЬ РЕВЕРСИВНОЕ ВКЛЮЧЕНИЕ ДВИГАТЕЛЕЙ М1, ОТКЛЮЧЕНИЕ ПО КНОПКЕ СТОП, А ТАКЖЕ ПО ОДНОМУ ИЗ ДВУХ СИГНАЛОВ АВАРИИ.
|
|
|
3.25. НА ЯЗЫКЕ BASIC ПРОГРАММА «ВКЛ. М1, М2, М3 ЧЕРЕЗ ИНТЕРВАЛ ВРЕМЕНИ T = 3C И ИХ ОТКЛЮЧЕНИЕ ПРИ НАЛИЧИИ КОМАНДЫ «СТОП»
3.26. НА ЯЗЫКЕ LAD СОСТАВИТЬ ПРОГРАММУ «ВКЛЮЧЕНИЯ ДВИГАТЕЛЕЙ М1 И М2 ЧЕРЕЗ ИНТЕРВАЛ ВРЕМЕНИ T=2С И ИХ ОТКЛЮЧЕНИЕ ПРИ НАЛИЧИИ СИГНАЛА “СТОП”»
3.27. 
3.28. 
3.29. 
3.30. 
УПРОЩЕНИЕ ПРОГРАММИРОВАНИЕ ПЛК. ФУНКЦИОНАЛЬНЫЙ СОСТАВ ПЛК
Понятие ПЛК: слово программируемый – отражает возможность воспринимать программы на языке высокого уровня, контроллер – показывает возможность выполнять функции управления сложными технологическими процессами. Внедрение ПЛК стало возможным и необходимым благодаря развитию следующих направлений: релейной бесконтактной автоматики, систем программирования, бесконтактных систем логического управления.
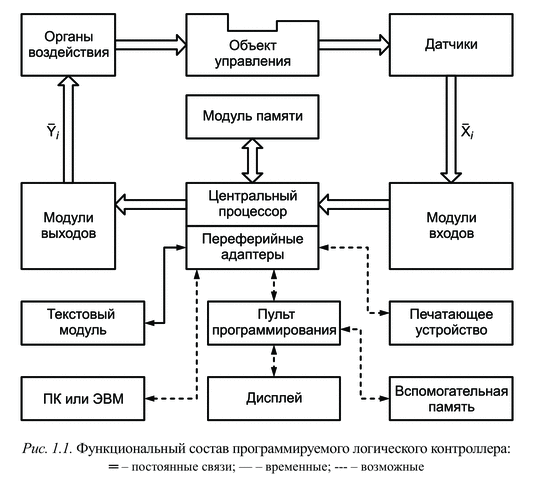 Основные характерные свойства ПЛК с точки зрения пользователя:
Основные характерные свойства ПЛК с точки зрения пользователя:
1) чаще всего, ПЛК используется для решения логических задач с элементами арифметических операций
2) упрощенное программирование, основанное на символах и мнемокодах –легко усваивается персоналом без спецподготовки
3) ПЛК имеет очень большую помехозащищенность, несет потенциальные развязки от внешних цепей (оптроны) – такой набор дает возможность эксплуатировать ПЛК в неблагоприятных условиях без применения доп. средств помехозащищенности.
|
|
|
4) ПЛК имеют модульную конструкцию, т.е. количество интерфейсных входов (выходов), объема ОЗУ могут наращиваться с определенным шагом.
5) ПЛК оснащаются дополнительными вспомогательными устройствами для выполнения дополнительных функций, к которым относятся таймеры для выдержки времени, счетчики импульсов и др.
ПЛК обеспечивают изменение логической программы функционирования с помощью встраиваемого или автономного устройства программирования, при этом отпадает необходимость в отключении объекта управления для переналадки.
3.2. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК. ЯЗЫКИ ПРОГРАММИРОВАНИЯ. КРАТКИЙ ОБЗОР. ЯЗЫК РКС.

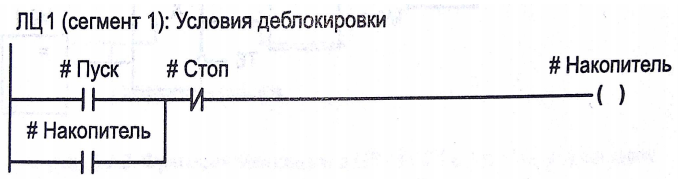 Пример языка РКС (LAD)
Пример языка РКС (LAD)

ПОРЯДОК СИНТЕЗА СИСТЕМЫ АВТОМАТИЗАЦИИ
Для выполнения синтеза логических управляющих систем обладать всей информацией о технологических процессах (последовательности операции, временных задержках для всех режимов работы объекта управления), применяемом оборудовании, типе датчиков, параметры и показатели, подлежащие контролю.
Синтез содержит следующие этапы:
1. Разделение всех действующих систем управления сигналов на входные, выходные и промежуточные. К входным относятся те сигналы, которые поступают от кнопок управления, концевых и промежуточных выключателей, датчиков и т.д. Каждому сигналу присваивается буквенное обозначение.Эту информацию целесообразно представить в виде таблицы, которая должна содержать обозначения сигналов, их адресацию и привязку к входным (выходным) разъемам ПК.
|
|
|
2. Составление алгоритма управления механизма, таблиц включения исполнительных органов и соответствующих им элементов контроля.
3. Вычерчивание циклограммы работы механизма
4. Описание алгоритма с помощью управлений алгебры логики.
5. Вычерчивание релейно-контактного эквивалента алгоритма; при этом управление приводится к базису И, ИЛИ, НЕ. Данный этап не является необходимым
6. Составление программы управления ПК, ее отладка и запись в память ПК.
7. Начертание принципиальной схемы электроавтоматики, составление спецификаций аппаратов, их конструктивная встройка в станцию управления, разработка монтажных схем.
Дата добавления: 2018-05-12; просмотров: 515; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!