Задач по последним цифрам зачетной книжки
Таблица К1.1 - Исходные данные для решения задачи К1



Задача К2. Кинематический анализ многозвенного механизма
Кривошип О1А вращается с постоянной угловой скоростью ωО1А = 3 рад/с. Определить для заданного положения механизма скорости точек А, В, С, D ... механизма, угловые скорости всех его звеньев, а также ускорение точек А, В и угловое ускорение звена АВ. Схемы механизмов показаны на рисунке К2.1, значения угла поворота кривошипа φ, в соответствие которому должен быть построен механизм, приведены в таблице К2.1.





Рис. К2.1
Выбор варианта задач: схема по предпоследней цифре шифра зачетной книжки, номер условия - по последней цифре шифра.
Расстояния между осями а, b, с, ... и размеры звеньев О1А, АВ, О2В,
и т. д., необходимые для построения механизма, измерить на схеме с учетом масштаба 1:10. Необходимые для вычисления скоростей и ускорений
расстояния и значения углов также измерить на схеме вычерченной, в самостоятельно выбранном масштабе, в соответствии с заданным значением
угла поворота кривошипа.
Таблица К2.1 - Значения угла поворота кривошипа для задачи К2

Задача К3. Определение абсолютной скорости и абсолютного
ускорения точки совершающей сложное движение
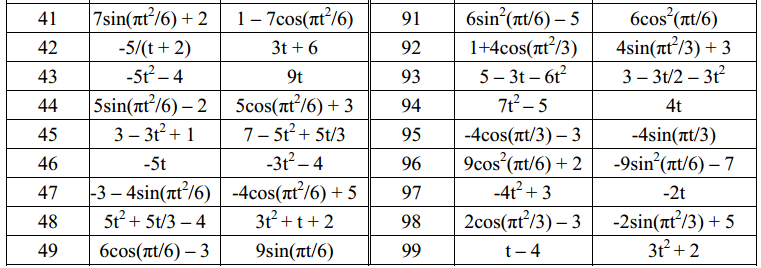
Прямоугольная пластина или круглая пластина радиуса R = 60 см
(рисунок К3.1) вращается вокруг неподвижной оси по закону φ = f|(t) (φ выражено в радианах, t - в секундах) заданному в таблице 6. Положительное
направление отсчета угла φ показано на рисунке дуговой стрелкой. На
схемах 0, 1, 2, 5, 6 ось вращения перпендикулярна плоскости пластины и
проходит через точку О (пластина вращается в своей плоскости); на схемах
3, 4, 7, 8, 9 ось вращения ОО, лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой BD (схемы 0-4) или по окружности радиуса R (схемы 5-9) движется точка М; закон её относительного движения, т. е. зависимость s = AM = f2(t) (s выражено в сантиметрах, t - в секундах), задан в таблице К3.1 отдельно для схем 0-4 и для схем 5-9; там же даны размеры b и l. На схемах точка М показана в положении, при котором s = AM > 0 (при s < 0 точка М находится по другую сторону от точки А).
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1 = 1 с.
Выбор варианта задач: схема по предпоследней цифре шифра зачетной книжки, номер условия - по последней цифре шифра.


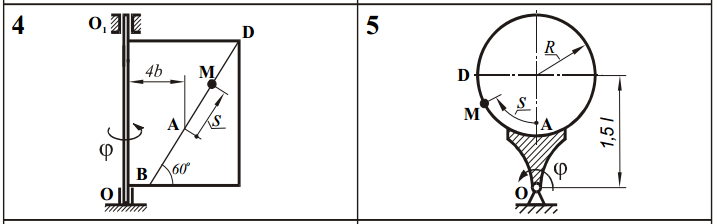


Рис. К3.1
Таблица К3.1 - Исходные законы переносного движения тела движения точки для задачи КЗ относительного

Приложение
Примеры выполнения заданий
Задача К1.
Точка М движется в плоскости ху согласно уравнениям:
х = 2 cos (πt2/3) - 2; у = -2 sin (πt2/3) + 3
(х, у - в сантиметрах, t - в секундах).
Определить уравнение траектории точки и для момента времени
t1 = 1 с, найти положение точки на траектории, её скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории в
рассматриваемой точке.
Решение
Для определения уравнения траектории точки исключим из заданных
уравнений движения точки время t. Поскольку t входит в аргументы тригонометрических функций sina и cosa, то для его исключения воспользуемся формулой sin2α + cos2α = 1.
Преобразуем заданные выражения к виду:
cos(πt2/3) = (x + 2) / 2;
sin(πt2/3) = (y - 3) / (-2).
Возведем в квадрат правые и левые части преобразованных выражений:
cos2 (πt2/3) = (х + 2)2 / 22;
sin2 (πt2/3) = (у - 3)2/(-2)2.
Складываем:
cos2(πt2/3) + sin2(πt2/3) = [(х + 2)2+ (у - З)2] / 22,
и в результате получаем
1 = [(х + 2)2 + (у - З)2] / 22 или (х + 2)2 + (у - 3)2 = 22.
Траектория точки окружность радиусом R = 2 см и центром в точке
С (-2; 3).
Определяем положение точки на траектории при t = 1 с:

В рассматриваемый момент времени положение точки М на траектории определится координатами (-1; 1,26).
Скорость точки найдем по её проекциям на координатные оси:

Аналогично найдем ускорение точки:

Касательное ускорение точки в рассматриваемый момент времени
определяем по известной формуле
aτ = (axVx + ayVy)/V = [(-8,03)(-3,63)+ 5,49(—2,09)]/4,19 = 4,21 см/с2.
Знак «+» в значении аτ означает, что движение точки ускоренное и
вектора аτ и V совпадают по направлению.
Нормальное ускорение точки при t = 1 с:

На схеме (рисунок К1.1) изображена траектория точки, её положение
на траектории в заданный момент времени, вектора скорости и ускорения,
а также все их составляющие.

Рис. К1.1
Радиус кривизны траектории
ρ = V2/an = 4,192/8,76 = 2,00 см.
Задача К2.
Дана (рисунок К2.1) схема механизма. В механизме кривошип О1А вращается с постоянной угловой скоростью ωО1А= 2 рад/с. Исходные данные
для построения механизма в заданном положении приведены в таблице А.1.
Таблица К2. 1 - Исходные данные для построения механизма
 Определить для заданного положения механизма:
Определить для заданного положения механизма:
- скорости точек А, В, С, D, Е, F и угловые скорости всех звеньев механизма с помощью мгновенных центров скоростей;
- ускорение точек А и В и угловое ускорение звена АВ.
Решение
1. Определение скоростей точек и угловых скоростей звеньев механизма с помощью мгновенных центров скоростей.
Определяем положение мгновенных центров скоростей звеньев механизма, для чего строим (рисунок К2.2) схему механизма в выбранном
масштабе.

Рис.К2.2

Рис. К2.2
В данном механизме кривошипы О1А и О2D вращаются соответственно вокруг неподвижных центров О1 и O2, ползуны В и F движутся поступательно в прямолинейных направляющих, а шатуны АВ, СЕ и EF совершают плоско-параллельное движение.
Мгновенный центр скоростей РАВ звена АВ находится как точка пересечения перпендикуляров, проведенных из точек А и В к их скоростям. Аналогично определяется положение мгновенных центров скоростей PCD и PEF.
Скорости точек звеньев механизма пропорциональны расстояниям от
рассматриваемых точек до мгновенных центров скоростей соответствующих звеньев.
Необходимые для вычисления скоростей расстояния измерим на чертеже с учетом выбранного масштаба. Значения этих расстояний приведены в таблице рядом со схемой механизма (см. рисунок К2.3).
Кривошип О1А вращается с угловой скоростью ωО1А вокруг точки O1, тогда скорость точки А будет равна:
VA = ωО1А ∙O1А = 2∙17 = 34 см/с.
Угловая скорость шатуна АВ:

Определяем скорости точек В и С (как принадлежащих звену АВ):
VB = ωAB∙ВРAB = 0,22∙116 = 25,52 см/с;
VC = ωAB∙CРAB = 0,22∙129 = 28,38 см/с.
Точка С принадлежит также шатуну СЕ, поэтому можем определить
угловую скорость шатуна:

Определяем скорости точек D и Е:
VD = ωCE∙DРCE = 0,84-22 = 18,48 см/с;
VE = ωCE∙EРCE = 0,84-34 = 28,56 см/с.
Угловая скорость кривошипа DO2:

Угловая скорость шатуна EF:

Скорость точки F:
VF = ωEF∙FРEF = 0,71 ∙ 27 = 19,17 см/с.
Полученные результаты сведем в таблицу (таблица К2.2).
Таблица К2.2 - Сводная таблица результатов расчета скоростей

Дата добавления: 2018-05-12; просмотров: 1151; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!