Kreisabschnitt im Raum (Radius r)
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Иркутский государственный технический университет»
Факультет прикладной лингвистики
Выпускная работа
по программе
«Переводчик в сфере профессиональных коммуникаций»
Специальность «Мехатроника»
Выполнил: Кабачук И.М.
Студент ИАМиТ гр.МЕХ-09
Проверила: доцент Рудых А.М.
Рецензия: доцент к.т.н. Викулова С.В.
Иркутск 2013
Рецензия
На выпускную работу студента института авиа-машиностроения и транспорта группы МЕХ-09 Кабачук Ивана Михайловича на тему
«Планирование траектории» .
Рецензируемая работа посвящена основным характеристикам роботов манипуляторов, таким как рабочая область, скорость перемещения рабочего органа, движение оптимальное во времени. Перевод выполнен по материалам книги Карла Поппа «Мехатроника».
В представленной работе рассматриваются влияние скоростных факторов на кинематику движения робота, также причины негативного влияния на работу робота манипулятора и методы устранения отрицательно воздействующих факторов.
|
|
|
Текст переведен адекватно, лексика понятна. В работе встречается большое количество терминов, которые точно переведены на русский язык. Проведено интересное с точки зрения практики перевода изучение особенностей немецкоязычной учебной литературы технического характера, и основных способов её перевода. В дипломной работе представлены лексико-грамматические трансформации.
Таким образом, цели и задачи работы были реализованы. Дипломная работа полностью отвечает требованиям, предъявленным к выпускным квалификационным работам, она может быть допущена к защите и заслуживает высокой оценки.
Доцент кафедры ОиАМ, к.т.н Викулова С.В.
Содержание
Введение. 3
1 Перевод технического текста. 4
2 Словарь. 31
3 Немецкий тескт. 37
Заключение. 55
Введение
Важнейшими факторами на производстве являются точность выполняемых процессов и время затраченное на выполнение операции. Увеличить и уменьшить значение данных характеристик соответственно позволяет планирование траектории правильного движения. Что несомненно является прямой задачей мехатроники.
|
|
|
В работе будет рассмотрено влияние скоростных факторов на кинематику движения робота, также причины негативного влияния на работу робота манипулятора и методы устранения отрицательно воздействующих факторов.
Перевод технического текста
| Перевод с немецкого языка | Переводческие приемы |
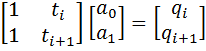
| 1. Под общим планом траектории движения понимается определение траектории отдельных частей мехатронной системы по определенным критериям. | Расширение |
| 2. Критерии могут формироваться относительно функциональности системы, определяются через абсолютные координаты, либо через обобщенные координаты. | Приближенный перевод |
| 3. При определении пути или траектории движения нужно обращать внимание на вспомогательные условия, они могут существовать в форме уравнений и/или в другой форме, они описывают кинематические и кинетические качества системы. | Синтаксическая замена |
| 4. Такие пути или траектории называются допустимыми. | Транслитерация |
| 5. Прежде должно предоставляться несколько различных рекомендованных путей и траекторий: путь описывается как геометрическое место всех положений, которые приемлемы с кинематикой системы. | Конверсия |
| 6. При этом речь идет чисто о геометрическом описании движения. | Лексическая замена |
| 7. В противоположность этому траектория также содержит информацию о временном прохождении пути. | Транслитерация |
| 8. Связь места и времени получается обычно посредствам кинетического преобразования модели и описывается уравнениями движения. | Сужение |
9. Во многих случаях задание разделяют на:
- Определение геометрии пути в зависимости от параметра пути s (например, длины дуги) с последующим x = x [s (t)] или q = q [s (t)] имеет здесь смысл.
- Определение временного прохождения пути, т.е. выбор скорости перемещения  = (t). = (t).
| Транслитерация Лексическая замена |
| 10. Технически важные пути геометрии - это части прямых линии, части конических сечений (Круги, эллипсы, гиперболы) или спиралеобразные пути. | Конверсия |
| 11. Несколько критериев и дополнительных условий: | |
| 12. В робототехнике используют движение (точка в точку) и движение (непрерывный путь), они играют важную роль. | Добавочное значение |
| 13. При движении ТВТ задаются только пограничные пункты рассмотренного интервала движения. | Калькирование |
| 14. Движение может выбираться свободно при дополнительных условиях. | Сужение |
| 15. При движении НП должны быть заданы все данные интервала движения. | Целостное преобразование |
| 16. Влияние может зависеть только от скорости перемещения. | Целостное преобразование |
| 17. Если проблема имеет несколько допустимых решений, то оптимальные пути и траектории могут быть обнаружены при использовании новых методов. | Добавочное значение |
| 18. Типичные критерии оптимизации: Пути с минимальной длиной, оптимальные по времени траектории, траектории с оптимальными энерго-затратами. | Расширение |
| 19. Дополнительные условия, которые нужно учитывать при траектории движения, имеют вид уравнений - это кинематические уравнения ,которые описывают кинематическую совместимость - уравнения движения для связи величин движения и силы. | Расширение |
| 20. Помимо этого, дополнительные условия могут иметь вид неравенств, например - Ограничения величин движения | Целостное преобразование |
  q q 
  
 - Ограничения статической величины
- Ограничения статической величины
 Q Q 
| |||||||||||||||||||||||||||||
| 21. Проблему устранения колебаний можно сформулировать немного иначе. | Расширение | ||||||||||||||||||||||||||||
| 22. В этом случае описывается колебательное движение конфигурацией траектории пространства , целью является достижение сокращения определенных величин колебания путем пассивных или активных решений. | Синтаксическая замена | ||||||||||||||||||||||||||||
| Планирование кинематики движения | Транслитерация | ||||||||||||||||||||||||||||
| 23. Как правило, описание движения происходит в абсолютных координатах x (t). | Калькирование | ||||||||||||||||||||||||||||
| 24. Из этого следует, что для определения соответствующих обобщенных координат q (t) всегда должна решаться обратная кинематическая задача. | Конверсия | ||||||||||||||||||||||||||||
25. Из представления параметра x = x[s(t)] или
q = q[s(t)],  следуют следуют
 = =  , ,  = = 
| Транслитерация | ||||||||||||||||||||||||||||
| 26. Посредствам следующего дифференцирования по времени находят отношения для ускорений. | |||||||||||||||||||||||||||||
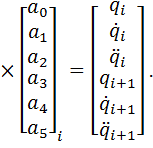
27. Результаты представлены после применения матрицы Якоби в таблице 7.1 для конфигурации и космического пространства.
Таблица 7.1: Определение пути перемещения (
| Калькирование | ||||||||||||||||||||||||||||
| Описание пространственных кривых | |||||||||||||||||||||||||||||
| 28. Далее приведены важные понятия и качества пространственных кривых. | Транслитерация | ||||||||||||||||||||||||||||
29. Пространственная кривая может быть определена местным вектором r (s), с s в качестве параметра системы референтных координат,

| Конверсия | ||||||||||||||||||||||||||||
30. Для характеристики свойств r (s) в окрестностях сферы параметра s = sp, может быть использовано разложение в ряд Тейлора

| Лексическая замена | ||||||||||||||||||||||||||||
31. Из этого выражения могут быть выведены следующие понятия:
- Вектор единицы касательных:  - Изгиб:
- Изгиб:  - Изгиб:
- Изгиб:  - Нормальный основной вектор:
- Нормальный основной вектор:  - Вектор матрицы:
- Вектор матрицы: 
| Лексическая замена | ||||||||||||||||||||||||||||
| 32. Геометрическая интерпретация представлена на рис. 7.2. | |||||||||||||||||||||||||||||
| 33. Три вектора t, n, b образуют пространственные оси координат для описания кривых P. | Смысловое развитие | ||||||||||||||||||||||||||||
| 34. Эта система координат состоит из правильных прямых углов. | Конверсия | ||||||||||||||||||||||||||||
| 35. Векторы t и n соприкасаются с плоскостью в точке P; n и b с нормальной плоскостью, а t и b с выпрямительными плоскостями. | Переосмысление | ||||||||||||||||||||||||||||
36. Если ортогональный вектор и единичный вектор касательных выходят из исходной точки s = 0, то в зависимости от s, можно описывать пространственную кривую уравнением
 . .
| Лексическая замена | ||||||||||||||||||||||||||||
37.  Рис. 7.2: Описание пространственной кривой
Рис. 7.2: Описание пространственной кривой
| Транслитерация | ||||||||||||||||||||||||||||
| 38. Пример 7.1: Несколько простых пространственных кривых. | Транслитерация | ||||||||||||||||||||||||||||
| 39. Прямая часть между двумя точками Р и Pi+1. | |||||||||||||||||||||||||||||
40. Для единичного вектора касательных должно быть применимо отношение.
 . .
| Лексическая замена | ||||||||||||||||||||||||||||
41. Из главы (7.3) изображение параметра можно получить следующим преобразованием

| Расширение | ||||||||||||||||||||||||||||
42. Скорость можно найти как скорость перемещения
| Перераспределение | ||||||||||||||||||||||||||||
| Сегмент (радиус r) | Сужение | ||||||||||||||||||||||||||||
43. Для вывода общих представлении параметров сегмент сначала определяется во вспомогательной системе координат (KS) Ч. с s = r длина дуги.
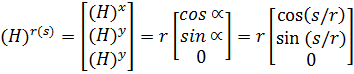
| Перераспределение | ||||||||||||||||||||||||||||
44. Сегмент определяется интервалом 
| |||||||||||||||||||||||||||||
| 45. Изображение параметра сегмента, находящегося в системе координат (KS) R, может быть получен простой трансформацией координат из главы. (6.6) . | Приближенный перевод | ||||||||||||||||||||||||||||
46. Она записывается  или
или
 , ,  . .
| Транслитерация | ||||||||||||||||||||||||||||
47. Наряду с уже описанными величинами обозначают  - местный вектор направленный центру и - местный вектор направленный центру и  -матрица поворота, которыми описывает зависимость -матрица поворота, которыми описывает зависимость  от от 
| Лексическая замена | ||||||||||||||||||||||||||||
| Параметры скорости перемещения от времени | Смысловое развитие | ||||||||||||||||||||||||||||
| 48. На рис. 7.3 представлены несколько типичных зависимостей скорости от времени. | Смысловое развитие | ||||||||||||||||||||||||||||
| 49. При этом трапецевидный график скорости от времени особенно важен, так как часто используется техники, благодаря его легкой осуществимости. | Лексическая замена | ||||||||||||||||||||||||||||
| 50. Существенный недостаток в неустойчивости его ускорении. | Перераспределение | ||||||||||||||||||||||||||||
| 51. В отличии от него косинусобразный график зависимости (рис. 7.3c) имеет вид гладкой эпюры скоростей, из-за его непрерывной дифференцируемости. | Целостное преобразование | ||||||||||||||||||||||||||||
52.
 a)
a) 
 b)
b) 

 c)
c) 
 Рис. 7.3: Типичная зависимость скорости
Рис. 7.3: Типичная зависимость скорости
| Сужение | ||||||||||||||||||||||||||||
53. В дальнейшем симметричный и трапецеидальный профиль скорости будут исследоваться точнее
 : :
| Перераспределение | ||||||||||||||||||||||||||||
54. Сформируем граничные условия:
-  -
-  
| Переосмысление | ||||||||||||||||||||||||||||
55. Трапецеидальный график скорости имеет вид графика ускорения в форме выступа

| Добавочное значение | ||||||||||||||||||||||||||||
56. Двукратным интегрированием, с учетом граничных условий, получаем из этого выражение зависимость пути от времени
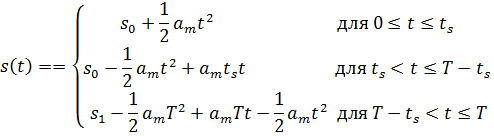
| Расширение | ||||||||||||||||||||||||||||
| 57. Рис. 7.4: Симметричный, трапецеидальный график скорости . | Транслитерация | ||||||||||||||||||||||||||||
58. Время переключения может быть рассчитано зависимостью  из ,
из ,  . .
| Лексическая замена | ||||||||||||||||||||||||||||
| 59. Из этого условия легко можно выразить важный пограничный параметр треугольного графика. | Экспликация | ||||||||||||||||||||||||||||
60. Здесь важная зависимость  . .
| |||||||||||||||||||||||||||||
61. Тогда из последнего отношения получаем
 или или  . .
| Конверсия | ||||||||||||||||||||||||||||
| 62. Пример 7.2: Движение оптимальное по времени | Транслитерация | ||||||||||||||||||||||||||||
| 63. Полученные результаты позволяют в простым способом получить другую интерпретацию, которая может формулироваться следующим образом : Момент переключения должен выбираться так, чтобы при данной граничной величине s0, s1 и данном постоянном ускорении во времени, управление становилось минимальным. | Перераспределение | ||||||||||||||||||||||||||||
64. Из главы (7.4) следует ,что :
 . .
| Экспликация | ||||||||||||||||||||||||||||
65. Необходимое условие для экстремального значения  ,
показывает , что ,
показывает , что   и, наконец,
и, наконец,  . .
| Расширение | ||||||||||||||||||||||||||||
| 66. Следовательно, мы приходим к выводу, что треугольный график скорости описывает движение за короткий промежуток времени. | Сужение | ||||||||||||||||||||||||||||
| 67. Связанный с графиком скорости, график ускорения описывает только фазу ускорения на определенном промежутке. | Синтаксическая замена | ||||||||||||||||||||||||||||
| 68. Такие законы движения обозначаются как законы равноускоренного движения. | Расширение | ||||||||||||||||||||||||||||
| 7.1.3 Генерация общих траекторий методом интерполяции полиномов. | Транслитерация | ||||||||||||||||||||||||||||
69. Если траектория q (t) или x (t), путь q (s) или x (s) производная скорости  дана в неизвестных величинах, то проблема траектории или планирования перемещения может предписываться аппроксимации функций в данных опорных точках. дана в неизвестных величинах, то проблема траектории или планирования перемещения может предписываться аппроксимации функций в данных опорных точках.
| Калькирование | ||||||||||||||||||||||||||||
70. Этими точками будет временной интервал [0, Т] монотонно растущий в зависимости от неизвестного времени  , при , при  , разбивающим интервал на N отрезки , разбивающим интервал на N отрезки  . .
| Приближенный перевод | ||||||||||||||||||||||||||||
71. Рис. 7.5 показывает скалярное изображение 
| Сужение | ||||||||||||||||||||||||||||
72. Полиномы аппроксимации обозначаются  . .
| Калькирование | ||||||||||||||||||||||||||||
| 73. Рис. 7.5: Аппроксимация полиномами .
| Транслитерация | ||||||||||||||||||||||||||||
| 74. В зависимости от требований к постоянству от
. | Сужение | ||||||||||||||||||||||||||||
| 75. Наряду с полиномами аппроксимации, используются минимальные полиномы, это такие полиномы степень которых складывается из однозначности коэффициентов полинома. | Синтаксическая замена | ||||||||||||||||||||||||||||
1. Генерация непрерывных  траекторий траекторий
| Транслитерация | ||||||||||||||||||||||||||||
| 76. Они характеризуются постоянством траектории и могут приближаться к полиномам первого порядка. | Добавочное значение | ||||||||||||||||||||||||||||
77. Условия ограничения
 . .
| Лексическая замена | ||||||||||||||||||||||||||||
78. Для получения
 ,
коэффициенты ,
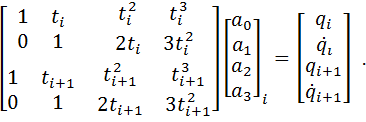
коэффициенты  , ,  , с применением условия ограничения, являются решением линейной системы уравнений: , с применением условия ограничения, являются решением линейной системы уравнений:
 . .
| Синтаксическая замена | ||||||||||||||||||||||||||||
79. В примере 7.2 описываются трапецеидальные траектории скорости, непрерывные  траектории. траектории.
| Сужение | ||||||||||||||||||||||||||||
2. Генерация более непрерывных  траектории (траектории имеющих точку разрыва) траектории (траектории имеющих точку разрыва)
| Переосмысление | ||||||||||||||||||||||||||||
| 80. Они характеризуются ее постоянством вплоть до первого разрыва. | Транслитерация | ||||||||||||||||||||||||||||
81. Условия ограничения в этом случае выглядят так:

 . .
| Приближенный перевод | ||||||||||||||||||||||||||||
82. Полином должен быть, как минимум, третьего порядка


| Синтаксическая замена | ||||||||||||||||||||||||||||
83.Коэффициенты  получим аналогично, решением системы уравнения получим аналогично, решением системы уравнения
| Конверсия | ||||||||||||||||||||||||||||
3. Генерация Более непрерывной траектории 
| Сужение | ||||||||||||||||||||||||||||
84. Условия границы


| |||||||||||||||||||||||||||||
85. Дифференцирование полинома до минимального порядка



| Переосмысление | ||||||||||||||||||||||||||||
86. Определим коэффициенты полинома из системы уравнений: 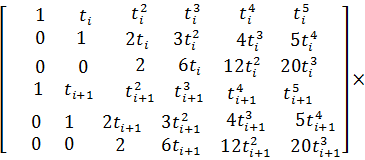
| Экспликация | ||||||||||||||||||||||||||||
| Пример 7.3: Свободно возрастающая фаза ускорения | Переосмысление | ||||||||||||||||||||||||||||
87. Например для рис. 7.3b, могут быть поставлены граничные условия:
 , ,

 . .
| Сужение | ||||||||||||||||||||||||||||
88. Из указанной ниже системы уравнений получают коэффициенты полинома:


| Перераспределение | ||||||||||||||||||||||||||||
89. Следовательно, свободное пространство для скачка может описываться уравнением:
 . .
| Расширение | ||||||||||||||||||||||||||||
| Пример 7.4: Связь прямых частей графика полинома 3-его порядка (рис. 7.6) | Перераспределение | ||||||||||||||||||||||||||||
| 90. Траектория разделена на N прямых сегментов. | Транслитерация | ||||||||||||||||||||||||||||
91. В моменты времени  заменяются, возникающие из-за линейной интерполяции, на полиномы 2-ого или 3-его порядка , чтобы избегать попадение в область неустойчивости. заменяются, возникающие из-за линейной интерполяции, на полиномы 2-ого или 3-его порядка , чтобы избегать попадение в область неустойчивости.
| Добавочное значение | ||||||||||||||||||||||||||||
92. Генерация более непрерывных  траекторий получается при наименьшей модификации Gl. (7. 8). траекторий получается при наименьшей модификации Gl. (7. 8).
| Экспликация | ||||||||||||||||||||||||||||
93. Для этого необходимо произвести следующую замену
 и и  . .
| Расширение | ||||||||||||||||||||||||||||
| 94. Рис. 7.6: Смешанная интерполяция | |||||||||||||||||||||||||||||
| 7.1.4 Планирование траекторий для избыточных систем | Перераспределение | ||||||||||||||||||||||||||||
95. После пункта 6.1.6 становится ясно что, избыточный MKS владеет большим количеством степеней свободы, чем необходимо для выполнения поставленной задачи  . .
| Смысловое развитие | ||||||||||||||||||||||||||||
| 96. Обратная задача кинематики, в этом случае, имеет многозначные решения, т.е. каждая точка может быть получена бесконечным множеством вариантов. | Переосмысление | ||||||||||||||||||||||||||||
| 97. Выбор подходящего варианта может зависеть от задачи оптимизации | Лексическая замена | ||||||||||||||||||||||||||||
98. В простейшем случае критерий добротности:
 это обобщенные скорости с симметричной, положительной (n, n) – матрицей, где
это обобщенные скорости с симметричной, положительной (n, n) – матрицей, где
 квадратичная зависимость. квадратичная зависимость.
| Синтаксическая замена | ||||||||||||||||||||||||||||
| 99. Подходящая конфигурация находится путем решения проблемы: a) с наименьшими квадратичными погрешностями скорости b) дополнительными условиями (6.41) . | Лексическая замена | ||||||||||||||||||||||||||||
| 100. Решение этих задач со вспомогательным условием может происходить методом Лагранжа множители. | Транслитерация | ||||||||||||||||||||||||||||
101. Для этого это рассматривается расширенный критерий добротности

| Сужение | ||||||||||||||||||||||||||||
102. Вектор  называют множителем Лагранжа. называют множителем Лагранжа.
| Калькирование | ||||||||||||||||||||||||||||
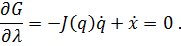
103. В итоге мы получаем необходимые условия существование минимума:
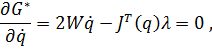
| Перераспределение | ||||||||||||||||||||||||||||
| 104. При помощи, этих соотношении возможно решение обратной задачи кинематики. | Переосмысление | ||||||||||||||||||||||||||||
105. Из первого уравнения следует
 перестановка во второе уравнение и его решение дает в итоге множитель Лагранжа
перестановка во второе уравнение и его решение дает в итоге множитель Лагранжа

| Переосмысление | ||||||||||||||||||||||||||||
106. Это разложение возможно, так как  имеет общую степень, следовательно может быть инвертировано. имеет общую степень, следовательно может быть инвертировано.
| Транслитерация | ||||||||||||||||||||||||||||
107. Наконец находят результат, за счет сокращения
 с с  которым можно пользоваться для решения обратной задачи кинематики, избыточного MKS.
которым можно пользоваться для решения обратной задачи кинематики, избыточного MKS.
| Синтаксическая замена | ||||||||||||||||||||||||||||
108. Достаточное условие существования минимума  верно при
верно при  . .
| Сужение | ||||||||||||||||||||||||||||
109. Исключение при  , так как , так как
 с
с  , который является псевдо-обратной величиной от J. , который является псевдо-обратной величиной от J.
| Смысловое развитие | ||||||||||||||||||||||||||||
| Пример 7.5:Обратная кинематика ровного, трехчленного механизма | Калькирование | ||||||||||||||||||||||||||||
| 110. У этого механизма речь пойдет об избыточной системе, только если позиция EP представляет интерес. | |||||||||||||||||||||||||||||
111. Тогда:
Экологический вектор:
 Вектор обобщенных координат:
Вектор обобщенных координат:

| Сужение | ||||||||||||||||||||||||||||
112. Рис. 7.7: Ровный, трехчленный механизм 
| Транслитерация | ||||||||||||||||||||||||||||
113. Решение:
Непосредственная кинематика:
Кинематические уравнения записывается с помощью записи DH матрицы:
| Транслитерация | ||||||||||||||||||||||||||||
114. После Gl. (6.36) матрица A имеет вид:
| Смысловое развитие | ||||||||||||||||||||||||||||
115. Для общей трансформации находят:  . .
| Транслитерация | ||||||||||||||||||||||||||||
116. Заменим:



| Лексическая замена | ||||||||||||||||||||||||||||
117. Для позиции EP из этого следует, что


| Перераспределение | ||||||||||||||||||||||||||||
| 118. Обратная кинематика: Решение будет предпринято с помощью Gl. (7.12). | Перераспределение | ||||||||||||||||||||||||||||
119. Для этого рассчитываем матрицу Якоби:

| Транслитерация | ||||||||||||||||||||||||||||
| 120. На рис. 7.8 результаты расчетов занесены в 3 различных матрицы расширенностью W, которые рассчитывались на основании способа повтора (6.47). | Сужение | ||||||||||||||||||||||||||||
121. Путем был выбран тот отрезок, который связывает точки  и и  и устанавливается с постоянной скоростью перемещении . и устанавливается с постоянной скоростью перемещении .
| Переосмысление | ||||||||||||||||||||||||||||
| 122. Опорное число точек N = 100 отчетливо оказывает влияние на W , только при незначительном движении, как на рис. 7.8c. | Сужение | ||||||||||||||||||||||||||||
| 7.2 Планирование траектории и обратная динамика | |||||||||||||||||||||||||||||
| 123. Само собой разумеется, планирование траектории возможно на основе динамического моделирования. | Сужение | ||||||||||||||||||||||||||||
| 124. Для этого могут быть использованы уравнения движения, после применения метода Лагранжа. | Перераспределение | ||||||||||||||||||||||||||||
125. После Gl. (6.77) они имеют форму  и показывают кинетическую связь между обобщенными координатами, скоростями, ускорениями и обобщенными конфигурациями сил.
и показывают кинетическую связь между обобщенными координатами, скоростями, ускорениями и обобщенными конфигурациями сил.
| Калькирование | ||||||||||||||||||||||||||||
126. Проблему планирование траектории можно решить следующими шагами:
1. Шаг (планирование движения): Установление траектории в экологических координатах, т.е. Определение от  или или  по подходящим критериям.
2. Шаг (обратная кинематика): Расчет обобщенных координат, скоростей и ускорений решением обратной кинематики.
3. Шаг (обратная динамика): Находим по подходящим критериям.
2. Шаг (обратная кинематика): Расчет обобщенных координат, скоростей и ускорений решением обратной кинематики.
3. Шаг (обратная динамика): Находим  и и  для Gl. (7.13) и рассчитываем необходимые количества движущих сил и моментов. для Gl. (7.13) и рассчитываем необходимые количества движущих сил и моментов.
| Добавочное значение | ||||||||||||||||||||||||||||
| 127. Расчет с опором на необходимые движущие усилия и моменты инерции из параметров траектории, можно назвать обратной динамикой. | Переосмысление | ||||||||||||||||||||||||||||
| 128. Обратная динамика - это вспомогательное средство для определения размеров систем и управления силами в мехатронных системах. | Смысловое развитие | ||||||||||||||||||||||||||||
129.  ставят перед упоминаниями в тексте техники управления и техники автоматического регулирования , представляя величины, которые зависят только от времени, и не зависят от состояния системы, это определяет характеристики управлений. ставят перед упоминаниями в тексте техники управления и техники автоматического регулирования , представляя величины, которые зависят только от времени, и не зависят от состояния системы, это определяет характеристики управлений.
| Калькирование | ||||||||||||||||||||||||||||
| 130. Величины установленные из обратной динамики часто обозначается как моментальные параметры. | Сужение | ||||||||||||||||||||||||||||
| 131. Они представляют собой важный блок в рабочих современных регулирующих программах (ср. главу 8). | Смысловое развитие | ||||||||||||||||||||||||||||
| 7.2.1 Определение параметров уравнения движение | Калькирование | ||||||||||||||||||||||||||||
132. Уравнения движения для i-той обобщенной координаты составляются после Gl. (6.76) , представляются в общей форме, как 

| Добавочное значение | ||||||||||||||||||||||||||||
133. Применение преобразований для параметра пути, после Gln. (7.1 и (7.2), дают выражение:


| Синтаксическая замена | ||||||||||||||||||||||||||||
134. Если отсортировать выражения из этих уравнений по временным координатам пути и в зависимости от тождества
 следовательно будет справедливо равенство:
следовательно будет справедливо равенство:

| Добавочное значение | ||||||||||||||||||||||||||||
135. При этом следующие коэффициенты определены для каждой величины s,
| Транслитерация | ||||||||||||||||||||||||||||
| 136. Изображение после Gl. (7.15) оказывается при планировании траектории целесообразным, когда речь идет о выяснении скорости перемещения. | Сужение | ||||||||||||||||||||||||||||
137. При изменении графика скорости  быстрая и эффективная оценка уравнений движения при определении параметров изображения динамичной модели становится возможной, так как коэффициенты после Gl. (7.16) зависят только от параметра пути быстрая и эффективная оценка уравнений движения при определении параметров изображения динамичной модели становится возможной, так как коэффициенты после Gl. (7.16) зависят только от параметра пути  не от не от  . .
| Перераспределение | ||||||||||||||||||||||||||||
| 138. Поэтому при изменении графика скорости коэффициенты остаются неизменными. | Транслитерация |
 псевдо-обратные матрицы Якоби)
псевдо-обратные матрицы Якоби) или
или  должны быть известны наряду с функциональной величиной
должны быть известны наряду с функциональной величиной  в опорных точках, представленных следующей схемой:
в опорных точках, представленных следующей схемой:
































Словарь
| Термин | Перевод |
| Die Abbremsphase Die Abgrenzung Der Ablauf Der Abschluß Der Absturz Die Allgemeingültigkeit Die Anforderung Der Antriebe Die Antriebskräfte Die Anwendung Die Approximation Die Aufgabe Die Aufteilung Die Aufweichung Das Ausdrücke Die Ausführung Die Ausnahmebehandlung Die Ausnahmesituation Die Auswahl Die Außenwelt | Фаза замедления Разделение, разграничение Последовательность Окончание, итог Катастрофа, падение Общепринятость Требование, Запрос Импульс Движущие силы Приложение Приближение Задание Раздел Размягчение Выражения Исполнение Реакция на особую ситуацию Исключительная ситуация Подбор Внешний мир |
| Die Bahn Der Bahnparameter Die Bedingung Der Bedienungsgerät Der Befehlszyklus Der Begriff Die Beschreibung Der Beschleunigungsprofil Der Bewegungsabläuf Die Bewegungsgrößen Das Bild Der Binormalenvektor Die Bitmuster Das Bündel | Путь Параметр пути Условие Устройство обслуживания Цикл команд Понятие Описание Профиль ускорения Процесс движения в целом Величины движения Рисунок Вектор нормали Конфигурация битов Пакет |
| Der Charakter | Характер |
| Die Darstellung Das Datenverarbeitungssystem Die Deutung Die Dimensionierung Der Durchlaufs Die Dynamik | Изображение Система обработки данных Интерпретация Определение размеров Расход Динамика |
| Der Echtzeitbetrieb Der Echtzeitdatenverarbeitung Der Echtzeitfähigkeit Der Echtzeitsoftware Das Echtzeitsystem Die Eingriffsdaten Die Einschränkung Die Einzelgröße Das Ereignis Das Ergebnis Die Ermittlung Das Erwartungswert Das Erzeugung Die Existenz | Режим реального времени Обработка данных в режиме реального времени Способность в режиме реального времени Программное обеспечение в режиме реального времени Система реального времени Данные вмешательства Ограничение Отдельная величина Событие Результат Определение Математическое ожидание Производство Существование |
| Die Fehlfunktionen Der Fehlschlag Die Fertigmeldungen Die Festlegung Die Festplatte Die Fixierung Der Freiheitsgrade Die Funktionalität Die Fähigkeit | Сбой Неудача Сигнал о готовности Установление Жесткий диск Фиксация Степень свободы Функциональность Способность |
| Das Gedächtnis Der Gesamtentwurf Das Gesamtsystem Der Geschwindigkeitsprofil Die Geschwindigkeitsanforderungen Die Gleichungen Die Gleichungssystem Der Grades Der Grenzwert Die Grundstrukturen Die Grundlage | Память Общий проект Совокупная система Профиль скорости Требования скорости Уравнение Система уравнении Степень Предельное значение Основные структуры Основание |
| Die Handlungsvorschrift Das Hardwarelösung Der Hauptnormalenvektor Das Hilfsmittel | Инструкция действий Аппаратное решение Нормальный вектор Вспомогательное средство |
| Die Identität Die Informationsverarbeitungssystemes Die Integration Der Interrupt Der Interruptmechanismus Die Informationen Die Iterationsvorschrift | Идентичность Системы обработки информации Интеграция Прерывание Механизм прерывания Информация Инструкция поворота |
| Die Kenngröße Die Kenntnis Die Kinematik Der Koeffizienten Die Konfigurationen Die Konfigurationsraum Die Koordinaten Die Kraft Das Kriterien Die Krümmung Die Kurvenpunkt | Параметр Сведения Кинематика Коэффициент Конфигурация Перемещение конфигурации Координата Сила Критерий Изгиб Пункт кривых |
| Die Lösung Der Lösungsansätze | Решение Подход к решению |
| Die Matrix Der Maschinenbefehle Die Methode Die Meßdaten Die Meßkomponenten Der Mittelwert Das Modells Die Modellbildung Der Moment Der Multiplikatoren | Матрица Машинная команда Метод Результат измерения Измерительные компоненты Среднее значение Образец Моделирование Момент Множитель |
| Das Notenblatt | Нотный лист |
| Die Obergrenze Die Optimierungsverfahren | Предел Процессы оптимизации |
| Der Parameterdarstellung Die Praxis Das Polynome Die Position Das Problem Die Programmabläufe Der Programmcodesequenz Die Programmiersprache Der Prozeßdatenverarbeitung Der Prozessorchip Der Prozessortyp Der Punkte | Изображение параметра Практика Полином Положение Проблема Программные последовательности Программная последовательность кода Язык программирования Обработка процесса Чип процессора Тип процессора Точка |
| Das Qualitätskriterium | Критерий качества |
| Die Randbedingungen Die Raumkurve Der Rechenprozess Der Rechner Die Rechneraktivitäten Das Rechnerhardware Das Rechnersystemes Das Rechnerumfeld Die Regelungstechnik Die Restkapazität Das Resultat Das Risiko | Условия границы Пространственная кривая Арифметический процесс Компьютер Действия компьютера Технические средства вычислительной машины Вычислительная система Компьютерный подтекст Техника автоматического регулирования Остаточная мощность Результат Риск |
| Die Schaltzeit Die Schaltzeitpunkt Der Schritt Die Signalleitung Der Stützstellen Das Systemeigenschaft Das Systemen | Время переключения Дата переключения Шаг Сигнальная шина Опорные места Системное качество Система |
| Die Taktfrequenz Der Taktgeber Der Tangenteneinheitsvektor Der Totalausfall Die Trajektorien | Тактовая частота Датчик тактовых импульсов Единичный вектор касания Полный отказ Траектория |
| Die Umsetzung Der Umweltraum Der Umweltvektor Die Ursache | Преобразование Экологическое помещение Экологический вектор Причина |
| Der Vektoren Die Verarbeitungsgeschwindigkeit Der Verlust Das Verständnis Die Verknüpfung Der Veränderung Der Vordergrund Der Vorgang | Вектор Скорость обработки Потеря, убыток Понимание Связь Изменение Передний план Процесс |
| Der Wandels Die Windung Die Wirklichkeit | Перемены Изгиб Действительность |
| Der Zeitgeber Der Zeitverbrauch Der Zusammenhang | Таймер Затраты времени Связь |
| Die Änderung | Изменения |
Немецкий тескт
1. Unter Trajektorienplanungwird die Festlegung der Trajektorien eines mechatronischen Systems nach bestimmten Kriterien verstanden.
2. Die Kriterien sind durch die Funktionalität des Systems bestimmt und können entweder in Umweltkoordinaten oder in verallgemeinerten Koordinaten formuliert werden.
3. Bei der Festlegung von Bahnen bzw. Trajektorien sind stets Nebenbedingungen zu beachten , die in Form von Gleichungen und/oder Ungleichungen vorliegen können und die die kinematischen bzw. die kinetischen Eigenschaften des untersuchten Systems beschreiben.
4. Solche Bahnen bzw. Trajektorien heißen zulässig.
5. Bevor dazu einige Beispiele aufgeführt werden, muß auf den Unterschied von Bahn und Trajektorie verwiesen werden: Als Bahn wird der geometrische Ort aller Punkte beschrieben, die mit der Kinematik des Systems verträglich sind.
6. Es handelt sich also dabei um eine rein geometrische Beschreibung der Bewegung.
7. Im Gegensatz dazu enthält die Trajektorie auch Informationen über den zeitlichen Durchlauf der Bahn.
8. Die Verknüpfung von Ort und Zeit ergibt sich in natürlicher Weise durch die kinetische Modellbildung und wird durch die Bewegungsgleichungen (6.76) beschrieben.
9. In vielen Fällen ist eine Aufteilung der Aufgabe in
- Festlegung der Bahngeometrie in Abhängigkeit eines Bahnparameters s (z.B. der Bogenlänge) sinnvoll, d.h. x = x[s(t)] bzw. q = q[s(t)] mit anschließender
- Festlegung des zeitlichen Durchlaufs der Bahn, d.h. Wahl der Bahngeschwindigkeit = (t).
10. Technisch wichtige Bahngeometrien sind Geradenabschnitte, Abschnitte von Kegelschnitten (Kreise, Ellipsen, Hyperbeln) oder spiralförmige Bahnen.
11. Einige Kriterien und Nebenbedingungen:
12. In der Handhabungstechnik spielen die Bewegung (point-to-point) und die Bewegung (continuous path) eine wichtige Rolle.
13. Bei der ptp-Bewegung sind nur die Randpunkte des betrachteten Bewegungsintervalles vorgegeben.
14. Die Bewegung kann bei Beachtung der sonst noch geltenden Nebenbedingungen frei gewählt werden.
15. Im Unterschied dazu ist bei der Bewegung die Bahn im gesamten Bewegungsintervall festgelegt.
16. Eine Einflußnahme ist nur über die Bahngeschwindigkeit möglich.
17. Besitzt das Problem mehrere zulässige Lösungen, können durch Optimierungsverfahren
optimale Bahnen oder Trajektorien ermittelt werden.
18. Typische Optimierungskriterien sind: Bahnen mit minimaler Länge, zeitoptimale Trajektorien, energie- und aufwandsoptimale Trajektorien usw.
19. Nebenbedingungen, die bei der Trajektorienplanung zu berücksichtigen sind, haben die Gestalt von Gleichungen, das sind
- die kinematischen Gln. (6.41), die die kinematische Verträglichkeit beschreiben
Und
- die Bewegungsgleichungen (6.76) für den Zusammenhang von Bewegungsund Kraftgrößen.
20. Darüber hinaus können eine Reihe von Ungleichungen von Bedeutung sein, z.B.
- Beschränkungen der Bewegungsgrößen
q
- Beschränkungen der Stellgrößen
Q
21. Probleme der Schwingungsisolation lassen sich ebenfalls in dieser Begriffswelt formulieren.
22. In diesem Fall wird durch die Trajektorie die Schwingbewegung im Konfigurationsraum beschrieben, und es ist das Ziel, durch passive oder aktive Maßnahmen eine Reduktion bestimmter, für die Funktionalität des Systems relevanter Schwingungsgrößen zu erreichen.
Kinematische Bahnplanung
23. In der Regel erfolgt die Beschreibung der Bahn in Umweltkoordinaten x(t).
24. Daraus resultiert, daß zur Ermittlung der entsprechenden verallgemeinerten Koordinaten q(t) stets das inverse kinematische Problem gelöst werden muß.
25. Aus der Parameterdarstellung x = x[s(t)] bzw.
q = q[s(t)], folgen
=  , =
, = 
26. Durch eine weitere Differentiation nach der Zeit findet man daraus die Beziehungen
für die Beschleunigungen.
27. Die Ergebnisse sind unter Verwendung der Jacobi-Matrix in Tabelle 7.1 für den Konfigurations- und den Umweltraum dargestellt.
| Konfigurationsraum | Umweltraum |

| 


|
Tabelle 7.1: Zur Bahnplanung ( Pseudoinverse der Jacobi-Matrix)
Beschreibung von Raumkurven
28. Im folgenden werden einige wichtige Begriffe und Eigenschaften von Raumkurven aufgeführt.
29. Die Raumkurve sei durch den Ortsvektor  mit
mit  als Parameter in einem Referenzkoordinatensystem definiert,
als Parameter in einem Referenzkoordinatensystem definiert,

30. Zur Kennzeichnung der Eigenschaften von in der Umgebung des Parameters  kann die Taylor-Entwicklung herangezogen werden,
kann die Taylor-Entwicklung herangezogen werden,

31 . Aus dieser Entwicklung sind die folgenden Begriffe abgeleitet:
- Tangenteneinheitsvektor: 
- Krümmung: 
- Hauptnormalenvektor: 
- Binormalenvektor: 
- Windung: 
32. Die geometrische Deutung ist in Bild 7.2 dargestellt.
33. Die drei Vektoren t, n, b bilden das sogenannte begleitende Dreibein im Kurvenpunkt P.
34. Es stellt ein rechtwinkliges Rechtssystem in P dar.
35. Von t und n werden die Schmiegeebene im Punkt P aufgespannt; von n und b die Normalebene und von t und b die rektifizierende Ebene.
36. Sind der Ortsvektor im Anfangspunkt s = 0 und der Tangenteneinheitsvektor in Abhängigkeit von s gegeben, läßt sich die Raumkurve aus konstruieren.
37.
Bild 7.2: Begriffe bei der Raumkurve
38. Beispiel 7.1: Einige einfache Raumkurven.
39. Geradenabschnitt zwischen zwei Punkten Pi und Pi+1.
40. Für den Tangenteneinheitsvektor muß gelten.
41. Aus Gl. (7.3) ergibt sich sofort die Parameterdarstellung формула
42. Für die Geschwindigkeit findet man mit als Bahngeschwindigkeit
 .
.
Kreisabschnitt im Raum (Radius r)
43. Zur Ableitung der allgemeinen Parameterdarstellung wird zunächst der Kreisabschnitt in einem Hilfskoordinatensystem (KS)H durch mit s = r als Bogenlänge definiert.
44. Durch das Intervall  wird der Kreisabschnitt festgelegt.
wird der Kreisabschnitt festgelegt.
45. Die Parameterdarstellung des Kreisabschnitts im gesuchten Koordinatensystem (KS)R kann durch eine einfache Koordinatentransformation nach Gl. (6.6) gefunden werden.
46. Diese lautet bzw.
, .
47. Neben den bereits eingeführten Größen bezeichnen den Ortsvektor zum Kreismittelpunkt und die Drehmatrix, die die Verdrehung des gegenüber dem  beschreibt.
beschreibt.
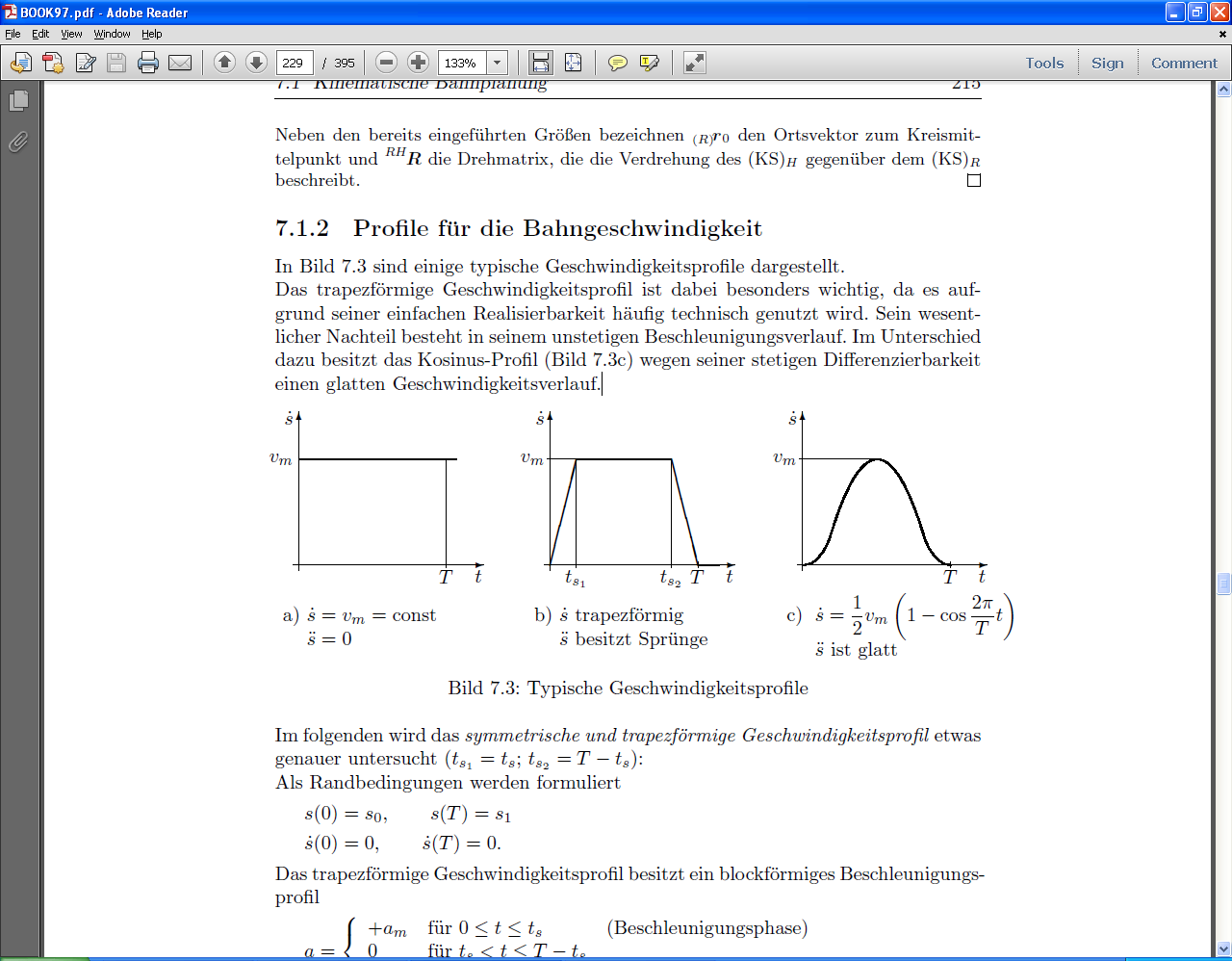
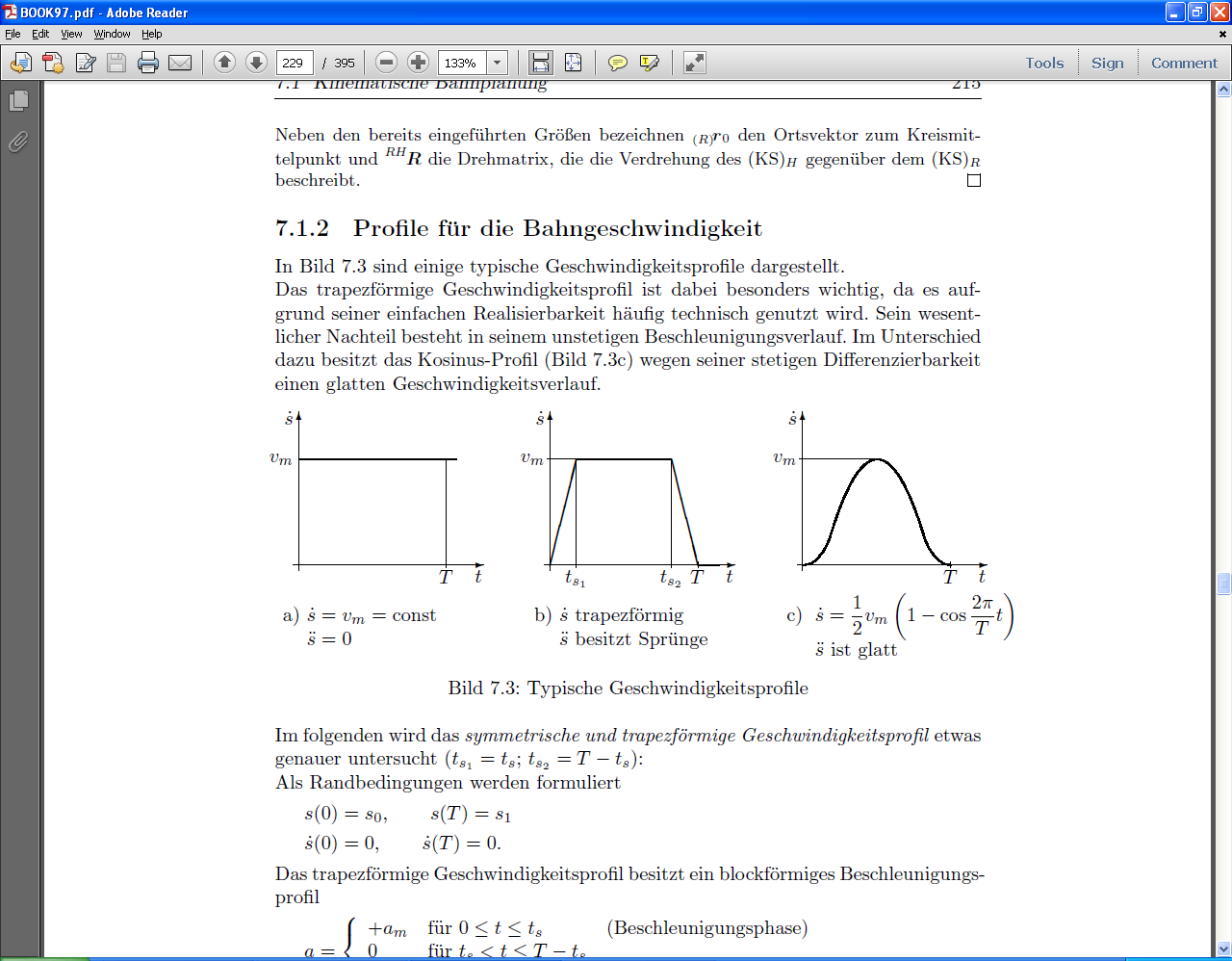
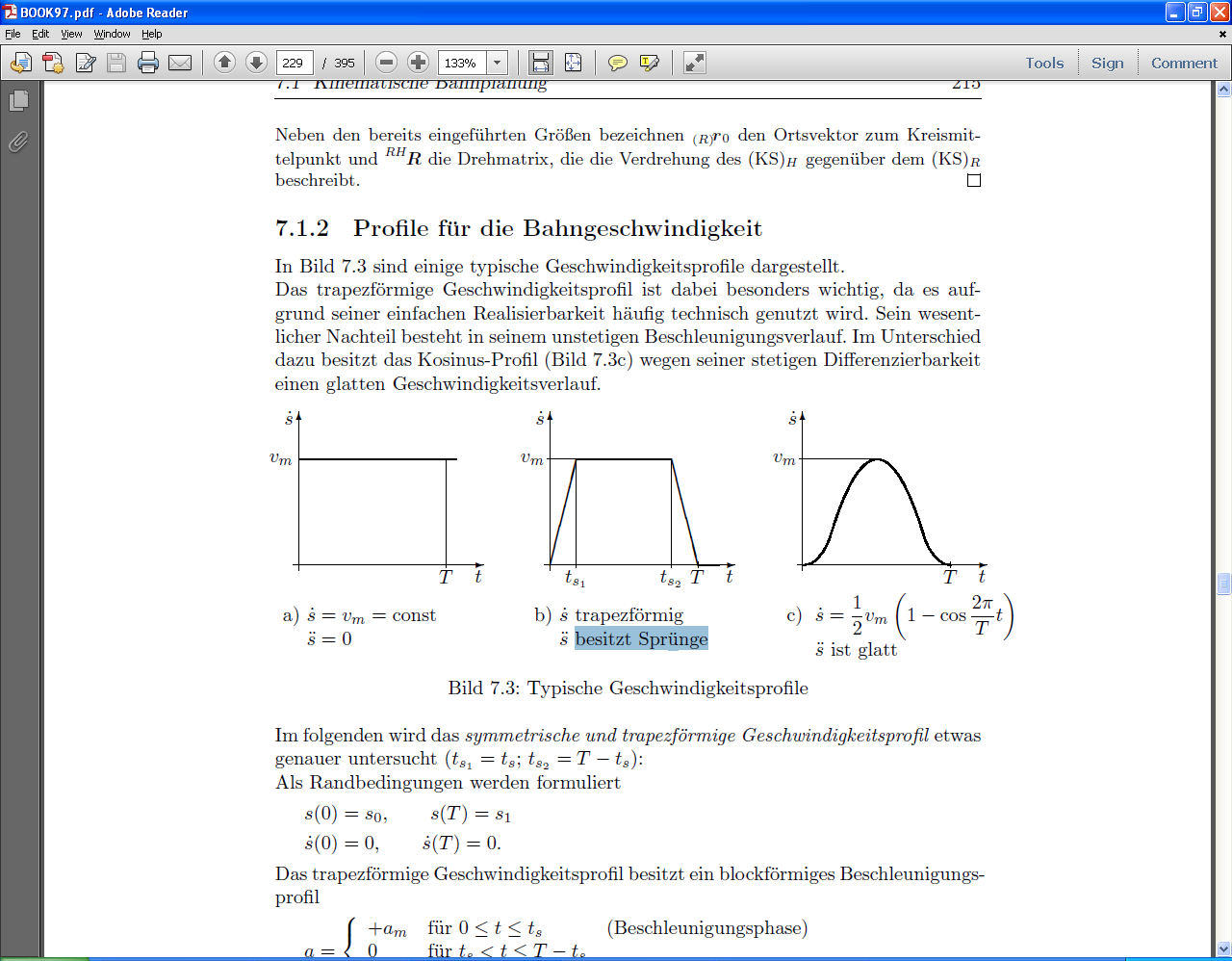
Profile für die Bahngeschwindigkeit
48. In Bild 7.3 sind einige typische Geschwindigkeitsprofile dargestellt.
49. Das trapezförmige Geschwindigkeitsprofil ist dabei besonders wichtig, da es aufgrund seiner einfachen Realisierbarkeit häufig technisch genutzt wird.
50. Sein wesentlicher Nachteil besteht in seinem unstetigen Beschleunigungsverlauf.
51. Im Unterschied dazu besitzt das Kosinus-Profil (Bild 7.3c) wegen seiner stetigen Differenzierbarkeit einen glatten Geschwindigkeitsverlauf.
52.
a) 
b) 
c) 
Bild 7.3: Typische Geschwindigkeitsprofile
53. Im folgenden wird das symmetrische und trapezförmige Geschwindigkeitsprofil etwas genauer untersucht
:
54. Als Randbedingungen werden formuliert
-
-
55. Das trapezförmige Geschwindigkeitsprofil besitzt ein blockförmiges Beschleunigungsprofil

56. Durch zweifache Integration und Berücksichtigung der Randbedingungen ergibt sich daraus für den Bahnparameter
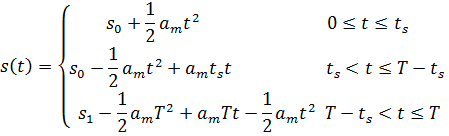
57. Bild 7.4: Symmetrisches, trapezförmiges Geschwindigkeitsprofil
58. Die Schaltzeit kann in Abhängigkeit von am aus 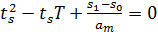 berechnet werden,
berechnet werden, 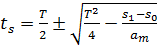
59. Aus diesen Bedingungen läßt sich leicht der wichtige Grenzfall des dreieckigen Geschwindigkeitsprofils ableiten.
60. Für diesen muß gelten.
61. Aus der letzten Beziehung ergibt sich dann
 bzw.
bzw. 
62. Beispiel 7.2: Zeitoptimale Bewegung
63. Die erhaltenen Ergebnisse erlauben in einfacherWeise eine andere Interpretation, die durch die folgende Frage formuliert werden kann: Wie muß der Schaltzeitpunkt gewählt werden, damit bei gegebenen Randwerten s0, s1 und gegebener konstanter Beschleunigung am die Verfahrzeit T minimal wird?
64. Aus Gl. (7.4) folgt sofort
 .
.
65. Die notwendige Bedingung für einen Extremwert  liefert
liefert


und schließlich
 .
.
66. Man findet folglich das physikalisch plausible Resultat, daß das dreieckige Geschwindigkeitsprofil eine Bewegung in kürzester Zeit beschreibt.
67. Das damit verbundene Beschleunigungsprofil besitzt nur eine Beschleunigungsphase und eine Abbremsphase.
68. Derartige Bewegungsgesetze werden als bang-bang-Bewegungen bezeichnet.
Дата добавления: 2018-04-15; просмотров: 154; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!