Регулирование угловой скорости трехфазных АД.
Регулирование угловой скорости АД можно осуществлять четырьмя основными способами:
1. изменением активного сопротивления, включенного в цепь ротора АД с фазным ротором;
2. изменением частоты тока питающей сети;
3. переключением обмоток статора на различное число пар полюсов;
4. изменением напряжения, подаваемого на обмотку статора.
Получить плавное регулирование скорости АД в широких пределах можно путем изменения реактивного сопротивления, включаемого в цепь обмотки статора АД. Однако данный способ регулирования в судовых ЭП не применяется и поэтому рассматриваться не будет.
Изменение сопротивления цепи ротора.
Первоначальная работа АД характеризуется точкой А на характеристике 1 (рис.4.14). Вращающий момент может быть выражен приближенной формулой М = сI2Ф. Допускаем соs j2 = 1, так как при работе на рабочей части характеристики скольжение очень мало и индуктивным сопротивлением ротора можно пренебречь. При увеличении сопротивления цепи ротора в первый момент времени уменьшается ток ротора I2 = Е2s/Z2 и соответственно уменьшается момент М электродвигателя. Нарушается равновесие моментов, которым характеризуется установившееся движение, и вращающий момент ЭД оказывается меньше момента сопротивления (точка В). Это приводит к снижению угловой скорости ротора и, следовательно, к увеличению скольжения и ЭДС ротора. Увеличение ЭДС ротора при уменьшении угловой скорости вызовет увеличение тока I2 и вращающего момента М. Снижение скорости ротора АД будет продолжаться до тех пор, пока вращающий момент не возрастет настолько, что он станет равным моменту сопротивления. Таким образом АД перейдет на механическую характеристику 2. Ввиду большей крутизны характеристики 2 устойчивость угловой скорости будет меньшей. Данный способ сходен с методами регулирования скорости ЭД постоянного тока при включении резисторов в цепь якоря.
|
|
|
Плавность регулирования зависит от числа ступеней регулируемого резистора. Обычно в качестве регулируемых ступеней используются пусковые ступени, а иногда ступени противовключения. Регулирование проводится вниз от основной угловой скорости на естественной характеристике, причем лучшее использование АД достигается при регулировании с постоянным моментом. Жесткость характеристик значительно уменьшается по мере снижения угловой скорости, поэтому диапазон регулирования невелик и зависит от возможных колебаний нагрузки. Обычно диапазон регулирования составляет (2 + 3): 1.
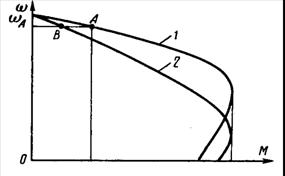
Рис.4.14. Регулировочные характеристики АД с фазным ротором при введении сопротивления в цепь ротора.
Недостатком этого способа являются также значительные потери энергии при работе на реостатных характеристиках, поскольку потери мощности пропорциональны моменту и скольжению ∆Р2 = Мw0s. С точки зрения потерь наиболее невыгодным оказывается регулирование при постоянном моменте и постоянной мощности. Более благоприятным в отношении потерь энергии получается регулирование при вентиляторной нагрузке, когда Мc уменьшается по мере снижения скорости. Из-за своей простоты этот способ находит применение в ЭП кратковременного режима работы (например, в ЭП якорно-швартовных устройств).
|
|
|
Изменение частоты тока.
При изменении этого параметра изменяется угловая скорость поля статора w0 = 2pf1/р, а пропорционально изменяется и скорость ротора. Этим способом пользуются, присоединяя АД к отдельному, специально для него предназначенному синхронному генератору или же тиристорному преобразователю частоты. Более подробно этот способ рассматривается в теме «Тиристорные преобразователи частоты».
Дата добавления: 2018-04-15; просмотров: 424; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!