Ступенчатые зубчатые механизмы, передаточное отношение.
Ступенчатый зубчатый механизм состоит из нескольких зубьев и их передаточное отношение определяются по теореме об общем передаточном отношении; при этом их разбивают на входящие в них зубчатые механизмы.
Ступенчатый зубчатый механизм имеют W = 1 и они бывают:
а) Ступенчатый механизм состоит из нескольких простых зубчатых механизмов (рис.12).

Разбивают на ступени, входящие в простой зубчатый механизм:
I – зубчатые колеса 1-2 с внешним зацеплением;
II – зубчатые колеса 2'- 3 с внутренним зацеплением;
III – рядовые зубчатые колеса 3'-5 с внешним и внутренним зацеплением.
Определяют передаточное отношение 1-5:
 (1) где
(1) где  (2)
(2)
 (3)
(3)
 (4)
(4)
Подставляют (2), (3), (4) в (1): 
б) Ступенчатый планетарный зубчатый механизм (состоит из нескольких планетарных ступеней), рис.13
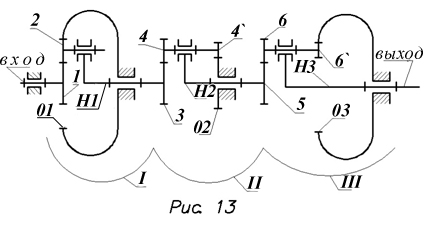
Разбивают на ступени 1- Н3 , входящие в планетарный зубчатый механизм:
I – планетарная ступень 1-Н1 (редуктор Джемса);
II – планетарная ступень 3-Н2 (редуктор Давида);
III – планетарная ступень 5-Н3 .
Определяют передаточные отношения 1-Н3:
 (1) где
(1) где  (2)
(2)
|
|
|
 (3)
(3)
 (4)
(4)
Подставляют (2), (3), (4) в (1): 
в) Ступенчатый комбинированный зубчатый механизм состоит из простого зубчатого механизма и планетарного зубчатого механизма.
Пример: Дано: кинематическая схема, рис 14.
Требуется: выполнить кинематический анализ зубчатого механизма.

Решение: 1) Обозначают на схеме механизма кинематические звенья (зубчатые колеса): 1, 2-2', 3-3', H, O.
2) Определяют число степеней свободы W : W = 3n - 2P5 - P4
Здесь: n = 4 (1, 2-2', 3-3', H); P5 = 4 (A, B, C, D); P4 = 3 (E, F, K).
Тогда W=3·4 - 2·4 - 3=1.
3) Разбивают механизм (от 1колеса к водилу Н ) на ступени, входящие в зубчатый механизм:
I – простой ступень механизма (1-2) с внешним зацеплением;
II – планетарный ступень зубчатого механизма (2'-Н).
4) Определяют передаточное отношение 1-Н:
 (1) где
(1) где  (2)
(2)
 (3)
(3)
|
|
|
Подставляют (2), (3) в (1):  .
.
Пример: Дано: Кинематическая схема, рис. 15.
Требуется: выполнить кинематический анализ зубчатого механизма.

Решение: 1) Обозначают на схеме механизма звенья:0, 1, 2, Н-3, 4-4', 5. Кинематические пары равны числу подвижных звеньев:A,B,C,D, E, F, K,L, M.
2) Определяют число степеней свободы W : W = 3n - 2P5 - P4
Здесь: n = 5 (1, 2, Н-3,4-4',5); P5 = 5 (A, B, C, D,Е); P4 = 4 ( F, K,L,M).
Тогда W=3·5 - 2·5 - 4=1.
3) Разбивают механизм на ступени (от 1колеса к 5колесу), входящие в зубчатый механизм: I – планетарный механизм 1-Н, II – простой 3-5.
4) Определяют передаточное отношение:
 (1)
(1)
где 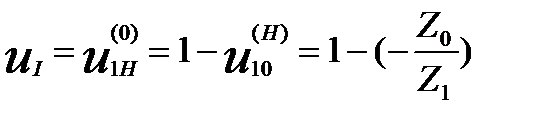 (2)
(2)
 (3)
(3)
Подставляют (2), (3) в (1): 
Дифференциальные зубчатые механизмы. Замкнутые ДЗМ.
Дифференциальный зубчатый механизм – это механизм, у которого все зубчатые колеса подвижны (рис. 16).
Дифференциальные зубчатые механизмы имеют число степеней свободы W ≥ 2 и в них могут быть один вход и несколько выходов (например, автомобильный дифференциал) или несколько входов и один выход (например, счетно-решающий суммирующий механизм).
|
|
|
В первом случае – применяют для разделения движения входного звена; во втором случае – для сложения движений входных звеньев.
 W = 3n - 2P5 - P4 ,
W = 3n - 2P5 - P4 ,
где n = 4 (1, 2, 3, H),
P5 = 4 (A, B, C, D), P4 = 2 (E, F)
Тогда: W = 12 - 8 –
Замкнутый дифференциальный зубчатый механизм – это механизм, соединенный двумя любыми своими звеньями с двумя звеньями замыкающей части в виде простого зубчатого механизма или планетарного зубчатого механизма), рис.17.
Замкнутые дифференциальные зубчатые механизмы имеют W = 1 и их применяют в грузоподъемных машинах (тали, тельферы, лебёдки, краны )
Здесь:
 I - дифференциальный 1-3-Н;
I - дифференциальный 1-3-Н;
II - СПЗМ 4-3' (замыкающая часть);
Звено 3 и звено Н-1 соединяются с звеном 3' и звеньями 4 – 2 .
W = 3n - 2P5 - P4,
где n = 5 (1, 2, 3-3', H-4, 5-5');
P5 = 5 (A, B, C, D, E);
P4 = 4 (F, K, L, M)
Тогда: W = 15 - 10 - 4 = 1.
Дата добавления: 2018-04-15; просмотров: 3430; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!