Кинематический анализ зубчатых механизмов.
Структурный анализ механизмов
| Рис. 3 |
| Рис. 4 |
| Рис. 5 |
| Рис. 6 |
| Рис. 7 |
| Рис. 7 |
1. Исключать из кинематической схемы механизма пассивные связи и лишние степени свободы(W).
2. Заменять плоские кинематические пары 4 класса на кинематические пары 5 класса, при этом заменяющий механизм должен иметь число степеней свободы прежнего механизма и выполнять все его движения.
3. Начинать отсоединение структурной группы с наиболее удаленной от ведущего звена механизма.
4. Отсоединять в первую очередь структурную группу II класса (если отсоединить структурную группу II класса не удается, отсоединяют структурную группу III класса и т.д.).
5. Следить, чтобы при отсоединении структурной группы оставшийся механизм сохранял свою работоспособность, т.е. не разваливался.
Замена кинематической пары 4 класса на кинематическую пару 5 класса.
Любая плоская кинематическая пара 4 класса заменяется двумя кинематическими парами 5 класса (вращательная и поступательная), соединенными между собой фиктивными звеньями.
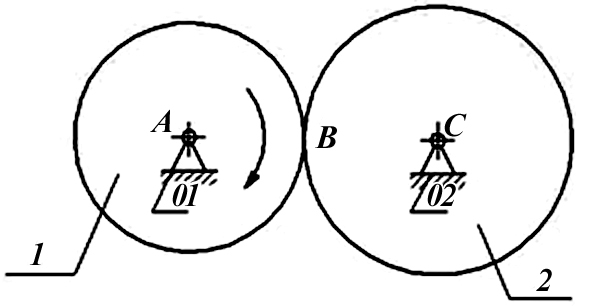
 Примеры: Дан зубчатый механизм. Требуется заменить кинематические пары 4 класса на кинематические пары 5 класса (рис. ):
Примеры: Дан зубчатый механизм. Требуется заменить кинематические пары 4 класса на кинематические пары 5 класса (рис. ):
Решение: 
Здесь n=2, P5=2, P4=1(т.В),
тогда W=3·2-2·2-1=1
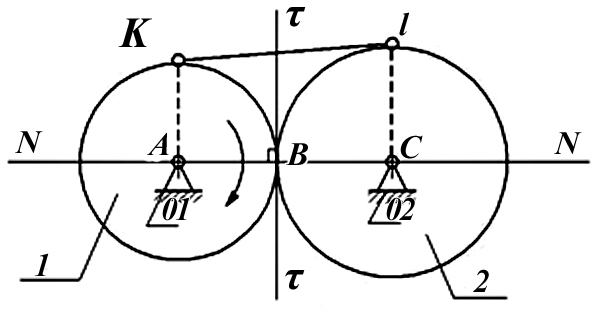
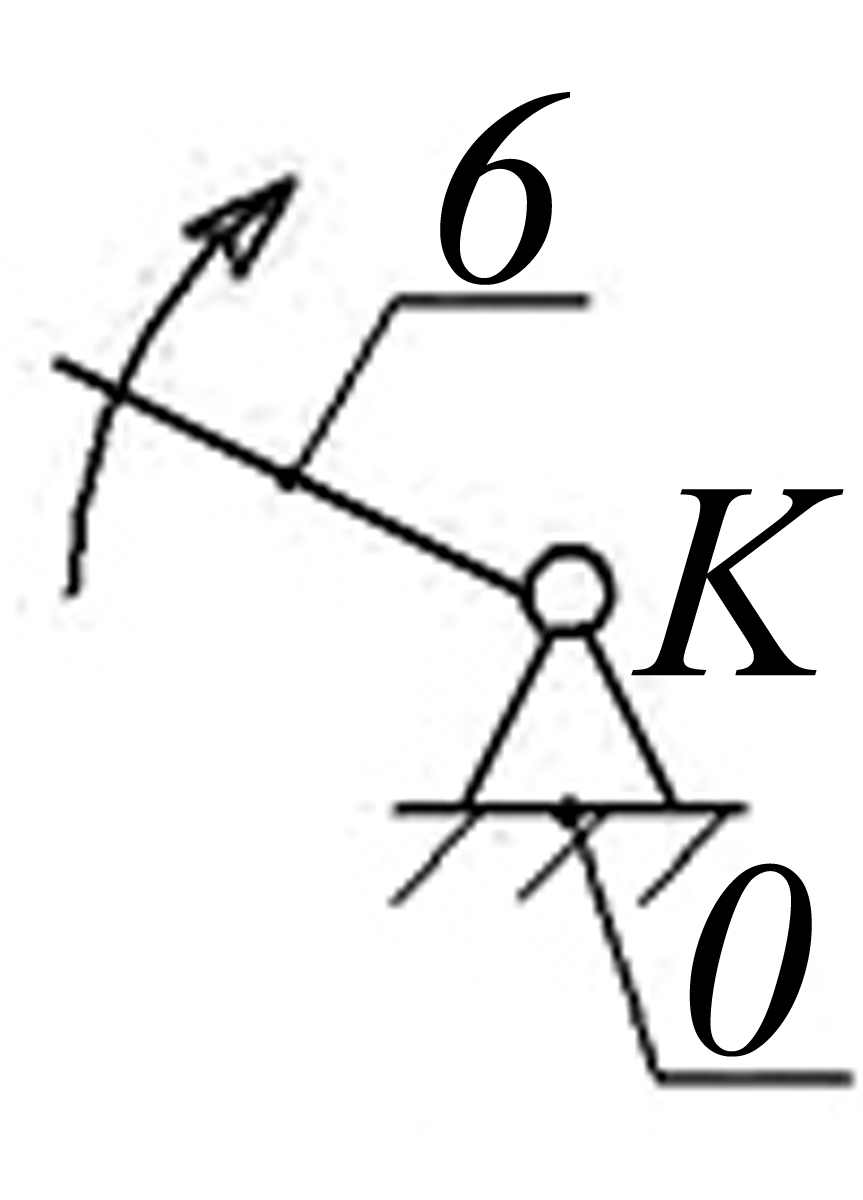
Через т. В проводят касательную t-t к звену 2. Через т. В под углом  к t-t проводят N-N. Из точек А и С проводят перпендикуляры к N-N. В точках их пересечения с N-N устанавливают вращательные кинематические пары 5 класса: К и L, которые соединяют фиктивными звеньями K-L.
к t-t проводят N-N. Из точек А и С проводят перпендикуляры к N-N. В точках их пересечения с N-N устанавливают вращательные кинематические пары 5 класса: К и L, которые соединяют фиктивными звеньями K-L.
|
|
|
- угол зацепления звена 1 и звена 2 друг с другом.


Составляют кинематическую схему заменяющего механизма и определяют число степеней свободы (W).
Здесь n=3, P5=4, P4=0 , тогда W=3·3-2·4=1
Дан фрикционный механизм, рис.
Решение:
Здесь: n=2, P5=2, P4=1(т.В)
Тогда: W=3·2-22-1=1
| Рис. 11 |

Составляют кинематическую схему заменяющего механизма и определяют число степеней свободы W,
Здесь: n=3, P5=4, P4=0. Тогда W=3·3-2·4=1
Дан кулачковый механизм, рис.
 Решение:
Решение:
Здесь n=2, P5=2, P4=1
Тогда W=3·2-2·2-1=1
Через т. В проводят касательную t-t к
звену 1 и звену 2. Через т. В перпендикулярно к t-t проводят N-N. На N-N находят центры кривизны звена 1 и звена 2, устанавливают в них вращательные кинематические пары 5 класса: К и L, которые соединяют фиктивными звеньями К-L, рис.
|
|
|


Составляют кинематическую схему заменяющего механизма и определяют число степеней свободы W, рис.
Здесь n=3, P5=4, P4=0, тогда W=3·3-2·4=1
Примеры выполнения структурного анализа механизма.
Дано: Кинематическая схема механизма.
Требуется выполнить структурный анализ механизма.
 Решение:
Решение:
а) Звенья подвижные: 1,2,3,4,5. Кинематические пары: А, А', B, C, D, E, E'
б) W=3n-2P5- P4, здесь n=5, P5=7, P4=0 → W=3·5-2·7=1
 n=2, P5=3,
n=2, P5=3,
W=3·2-2·3=0
Структурная группа II класса 2 порядка.
 Механизм развалился, т. к. при вращении звена 1 звено 4 будет неподвижным.
Механизм развалился, т. к. при вращении звена 1 звено 4 будет неподвижным.
Следовательно, выполнено неверно.
В этом случае отсоединяют структурная группа III класса
 n=4, P5=6, → W=3·2-2·3=0
n=4, P5=6, → W=3·2-2·3=0
|
|
|

3.Остаются звенья 0,1 с кинематической парой А.
W=3·1-2·1=1
Следовательно, ведущее звено – это механизм I класса.
Формула строения I (0,1) → III3 (2,3,4,5).
Основной механизм III класса.
Если в механизме за ведущее звено принять другое звено, то этот механизм может быть другого класса. На этом же примере за ведущее звено принимается звено 5.

1) Отсоединяют звенья 1,2 с кинематическими парами A,B,C,
n=2, P5=3, W=3·2-2·3=0.
 Структурная группа II класса 2 порядка
Структурная группа II класса 2 порядка
Рассматриваемый механизм не развалился, т.к. при движении ведущего звена 5 все его звенья будут подвижными. Следовательно, отсоединение структурной группы выполнено верно.

 2) отсоединяют звенья 3,4 с кинематическими парами А',D,E,
2) отсоединяют звенья 3,4 с кинематическими парами А',D,E,
n=2, P5=3, W=3·2-2·3=0
Структурная группа II класса 2 порядка
3) остаются звенья 0,5 с кинематической парой Е',
 n=1, P5=1, W=3·1-2·1=1
n=1, P5=1, W=3·1-2·1=1
Ведущее звено – это механизм I класса.
Дана кинематическая схема механизма 5 класса. Требуется выполнить структурный анализ механизма.
|
|
|

Решение:
Звенья: 0, 1, 2, 3, 4, 5, 0, 6, 0
Кинематические пары: А, B, C, D, D', E, F, K
W=3n-2P5-P4, здесь n=6, P5=8, P4=0 → W=3·6-2·8=2

1) отсоединяют звенья 4,5 с кинематическими парами D,D',E.
n=2, P5=3, W=3·2-2·3=0.
| Рис. 41 |
Рассматривается основной механизм с звеньями 0,1,2,3,6,0.
 Механизм не развалился, т.к. при вращении звенья 1 и 6 будут подвижными.
Механизм не развалился, т.к. при вращении звенья 1 и 6 будут подвижными.
Отсоединение структурной группы выполнено верно.
2) Отсоединяют от основного механизма звенья 2 и 3 с кинематическими парами B,C,F, рис.
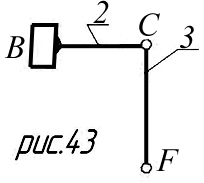
n=2, P5=3, W=3·2-2·3=0
Структурная группа II класса 2 порядка.
3) остаются ведущие звенья 0,1 с кинематической парой А и звенья 0,6 с кинематической парой К.

| Рис. 44 |
Механизм I класса Механизм I класса
4) запишем формулу строения механизма:
I (0,1)
II2 (2,3) → II2(4,5)
I (0,6) Механизм II класса
Кинематический анализ зубчатых механизмов.
Задачей кинематического анализа зубчатых механизмов является определение их передаточных отношений.
Зубчатый механизм — это механизм, состоящий из зубчатых колес и предназначенных для передачи вращения от одного вала машины к другому её валу с изменением величины передаваемого крутящего момента (Мкр).
Крутящий момент зависит от передаточных отношений, чем больше передаточное отношение, тем больше крутящий момент (Мкр). Зубчатый механизм устанавливают между двигателем и рабочим механизмом.
Зубчатый механизм, служащий для уменьшения частоты вращения или числа оборотов вала двигателя называется редуктором; для увеличения — мультипликатором; причем редуктор увеличивает крутящий момент (Мкр), а мультипликатор — уменьшает его.
Различают простые, планетарные (сателлитные), ступенчатые, дифференциальные и замкнутые дифференциальные зубчатые механизмы.
Планетарные зубчатые механизмы, передаточное отношение.
Частные передаточные отношения планетарных зубчатых механизмов.
Планетарный зубчатый механизм – это механизм, у которого хотя бы одна ось с группой зубчатых колес (сателлиты) подвижна в пространстве.
Планетарные механизмы применяют для получения больших передаточных отношений при меньших габаритах и весе, по сравнению с простыми зубчатыми механизмами. Планетарный зубчатый механизм состоит из центрального колеса, сателлитов (число сателлитов от 2 до 12) неподвижного колеса и водила (центральная подвижная ось сателлитов). Они имеют W=1 и бывают следующих видов: 1) редуктор Джемса (рис.8)
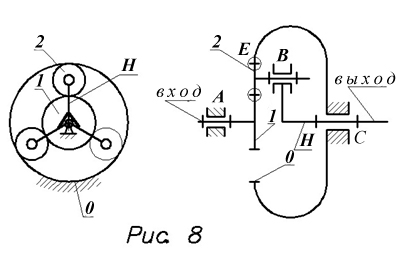
Здесь: 1 – центральное (солнечное) колесо; 2 – сателлит; 0 – неподвижное колесо; Н – водило (подвижное кинематическое звено).
W = 3n - 2P5 - P4
Здесь: n = 3 (1,2,H), P5 = 3 (A, B, C), P4 = 2 (D, E).
Тогда: W=3·3-2·3-2=1
Передаточное отношение планетарного зубчатого механизма определяется по формуле Виллиса:
 (1)
(1)
Рядовый цилиндрический планетарный зубчатый механизм 1- 0 (рис.9).

Тогда:  (2)
(2)
Подставляем (2) в (1): 
Определяем: а) обратное передаточное отношение

в) передаточное отношение от центрального зубчатого колеса к любому подвижному колесу (например, ксателлиту)
 .
.
2) редуктор Давида с внешним зубчатым зацеплением (рис.10).

Два или несколько зубчатых колеса, жестко закрепленные на одной оси представляют собой одно колесо и обозначаются одинаковыми цифрами; причем второе, третье зубчатое колесо будут с одним, двумя и т.д. штрихами. На рис.10: 2 - 2' .  , ( 1)
, ( 1)
где  – передаточное отношение ступенчатого планетарного механизма.
– передаточное отношение ступенчатого планетарного механизма.

Тогда:  (2)
(2)
Подставляют (2) в (1):  .
.
Дата добавления: 2018-04-15; просмотров: 1592; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!