Параметрический синтез систем
Теория
Параметрическим синтезом называется расчет параметров регуляторов.
При параметрическом синтезе структура системы автоматического управления известна. Эта структура определена техническими решениями системы, созданными проектировщиками в процессе её разработки. При решении задачи синтеза методами теории управления производится уточнение используемого закона управления и определение параметров настройки системы для обеспечения её качественной работы.
Современные ПИ и ПИД регуляторы на электронной или микропроцессорной базе реализуются с зависимыми настройками, так что передаточная функция их записывается в виде:
 , ,
| (4.1) |
 . .
| (4.2) |
где kp – Коэффициент пропорциональности;
Ti – Время изодрома (интегральная составляющая)
Td – Время предварения (дифференциальная составляющая)
Параметрическая оптимизация регулятора – это настройка его параметров таким образом, чтобы удовлетворить заданному требованию к виду переходного процесса с одновременной минимизацией некоторого критерия оптимальности.
К оптимальным типовым процессам регулирования относятся:
· апериодический процесс с минимальным временем регулирования рисунок 4.1. В данном случае настройки подбираются так, чтобы время регулирования tp было минимальным. Данный вид типового процесса широко используется для настройки систем, не допускающих колебаний в замкнутой системе регулирования, однако процесс характеризуется сравнительно большим динамическим забросом;
|
|
|
· процесс с фиксированным значением перерегулирования и минимальным временем первого полупериода t1. На рисунке 4.2 показан пример переходного процесса такого типа, когда перерегулирование составляет 20 %. Такой процесс соединяет в себе достаточно высокое быстродействие (минимальное время первого полупериода) и ограниченную колебательность. Поэтому настройки регулятора, ведущие к реализации этого процесса, часто применяются для регулирования технологических объектов;
· процесс, обеспечивающий минимум одного из интегральных критериев качества (ИКК).

Рисунок 4.1 – Апериодический график оптимальных типовых переходных процессов регулирования

Рисунок 4.2 – График оптимальных типовых переходных процессов регулирования с 20 % перерегулированием
Переходный процесс в теории систем представляет реакцию динамической системы на приложенное к ней внешнее воздействие до некоторого установившегося состояния.
Результаты моделирования
Определим значения коэффициентов Кx, Кy и Кz при заданных параметрах и при изменении параметров  14% системы САУ рисунок 4.3, при которых:
14% системы САУ рисунок 4.3, при которых:
|
|
|
- время нарастания переходной функции  < 1 сек;
< 1 сек;
- время переходного процесса tП < 2сек;
- перерегулирование s <20 %;

Рисунок 4.3 – структурная схема САУ
Значения параметров САУ сведены в таблицу 4.1, в которой оптимизируемые параметры выделены жирным шрифтом.
Таблица 4.1 – Значения параметров САУ
| Параметр | Заданные параметры | +14% к данным | -14% к данным |
| a | 15 | 17,1 | 12,9 |
| b0 | 7 | 7,98 | 6,02 |
| b1 | 0,4 | 0,456 | 0,344 |
| c0 | 0,13 | 0,1482 | 0,1118 |
| c1 | 0,7 | 0,798 | 0,602 |
| Kx | 112,567 | 39,4607 | 55,6526 |
| Ky | 79,7739 | 27,3211 | 62,7146 |
| Kz | 19,2977 | 7,0628 | 11,6078 |
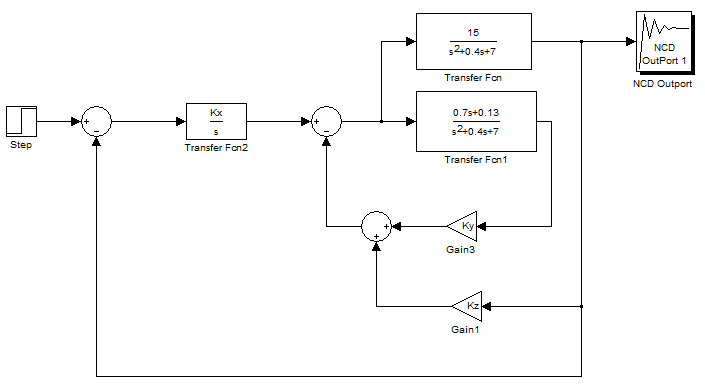
Рисунок 4.4 – Блок схема оптимизации параметров Kx, Ky, Kz при заданных параметрах

Рисунок 4.5 – Кривая переходного процесса при данных параметрах

Рисунок 4.6 – Оптимальные значения Kx, Ky, Kz при данных параметрах

Рисунок 4.7 – Блок схема оптимизации параметров Kx, Ky, Kz
+14% к данным параметрам
Переходный процесс синтеза при увеличенных параметрах системы показан на рисунке 4.8, а оптимальные значения Kx, Ky, Kz – на рисунке 4.9.
|
|
|

Рисунок 4.8 – Кривая переходного процесса, +14% к данным параметрам

Рисунок 4.9 – Оптимальные значения Kx, Ky, Kz +14% к данным параметрам
Рассмотрим вариант синтеза при уменьшении параметров системы. Ее блок схема показана на рисунке 4.10.

Рисунок 4.10 – Блок схема оптимизации параметров Kx, Ky, Kz
-14% к данным параметрам
Переходный процесс синтеза при уменьшенных параметрах системы показан на рисунке 4.11, а оптимальные значения Kx, Ky, Kz – на рисунке 4.12.

Рисунок 4.11 – Кривая переходного процесса -14% к данным параметрам

Рисунок 4.12 – Оптимальные значения Kx, Ky, Kz -14% к данным параметрам
Вывод
Заключение
Библиографический список
1. Туманов, М. П. Теория управления. Теория линейных систем автоматического управления [Текст] : учебное пособие. / М. П. Туманов. – Москва : МГИЭМ, 2005. – 82 с.
2. Клавдиев, А. А. Теория автоматического управления в примерах и задачах. Ч.1 [Текст] : учебное пособие / А. А. Клавдиев. – Санкт-Петербург : СЗТУ, 2005. – 74 с.
3. Вадутов, О. С. Теория автоматического управления. Лабораторный практикум [Текст] : учебное пособие / О. С. Вадутов, М. В. Тригуб. – Томск : Томский политехнический университет. : Изд-во Томского политехнического университета, 2014. – 112 с.
|
|
|
4. Тюкин, В. Н. Теория управления: Конспект лекций. Часть 1. Обыкновенные линейные системы управления [Текст] / В. Н. Тюкин, – 2-е изд., испр. и доп. – Вологда : ВоГТУ, 2000. – 200 с.
5. Лазарева, Т. Я. Теория автоматического управления [Текст] : учеб.-метод. пособие / авт.-сост.: Т. Я. Лазарева, Ю. Ф. Мартемьянов, В. Ю. Харченко. – Тамбов : Изд-во Тамб. гос. техн. ун-та, 2006. – 56 с.
6. Положение о дипломном проектировании [Электронный ресурс] : в 2-х частях : [самост. учеб. электрон. изд.]. Ч. 1. Единые требования к текстовым документам / Сыкт. лесн. ин-т (фил.) ФГБОУ ВПО С.-Петерб. гос. лесотехн. ун-т им. С. М. Кирова ; сост. : В. А. Паршукова, А. А. Митюшов. – Изд. 2-е, перераб. – Сыктывкар : СЛИ, 2011. – Режим доступа : http://lib.sfi.komi.com/ft/301-000180.pdf.
7. Положение о дипломном проектировании [Электронный ресурс] : в 2-х частях : [самост. учеб. электрон. изд.]. Ч. 2. Единые требования к структуре, оформлению и представлению дипломных проектов и дипломных работ / Сыкт. лесн. ин-т (фил.) ФГБОУ ВПО С.-Петерб. гос. лесотехн. ун-т им. С. М. Кирова ; сост. : В. А. Паршукова, А. А. Митюшов. – Изд. 2-е, перераб. – Сыктывкар : СЛИ, 2011. – Режим доступа : http://lib.sfi.komi.com/ft/301-000181.pdf.
Дата добавления: 2018-04-15; просмотров: 1091; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!