В соответствии с вариантом первой лабораторной работы построить модель процесса/объекта в среде Matlab Fuzzy Logic Toolbox и осуществить моделирование.

Рис.5 – Вид редактора FISпосле изменения переменных.



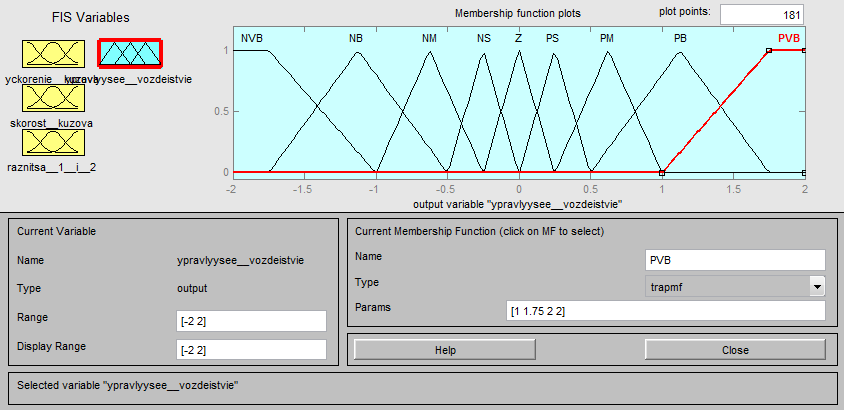
Рис.6 – Редактор функций принадлежности.
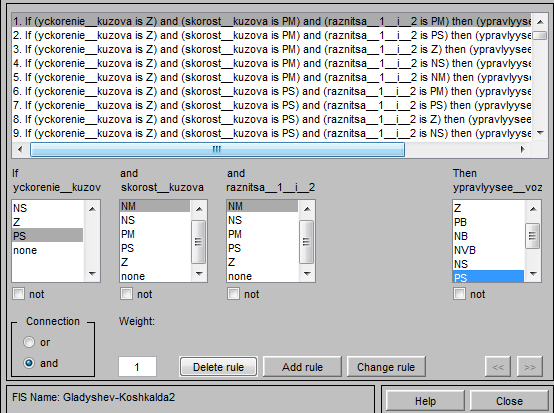
Рис.7 – Заполнение базы правил.

Рис.8 – Определение выходного значения.


Рис.9 – Просмотр поверхности системы нечеткого вывода.

Рис.10
Исследовать влияние вида функции принадлежности (трапециевидный, колоколообразный) на выходной сигнал системы.




Рис 11Функции принадлежности после изменения

Рис.12– Определение новых выходных параметров.


Рис.13– Просмотр поверхности системы нечеткого вывода.
Для одной из лингвистических переменной дополнительно ввести две новые функции принадлежности, оценить полученный результат.

Рис.14–Ввод новых функций принадлежности mf4иmf5длялингвистической переменной «Ускорение».
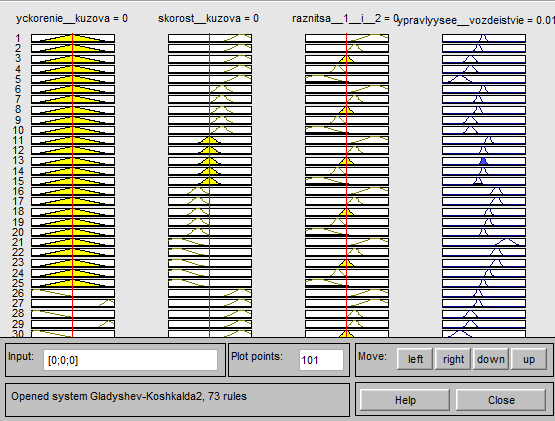
Рис.15–Отображение выходных значений.

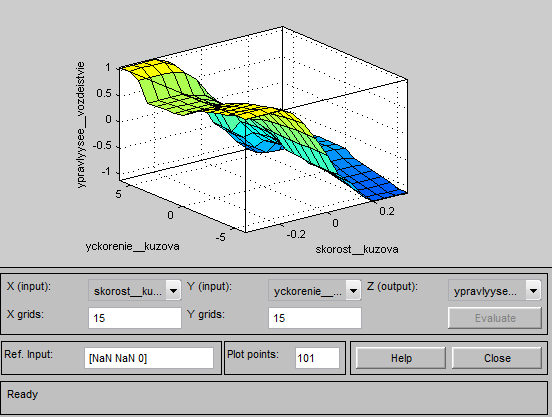
Рис.16– Просмотр поверхности системы нечеткого вывода.

Рис.17– Зависимость угла поворота регулятора от температуры воздуха
Исследовать влияние избыточности базы правил. Для этого в базу правил добавить два не противоречивых правила
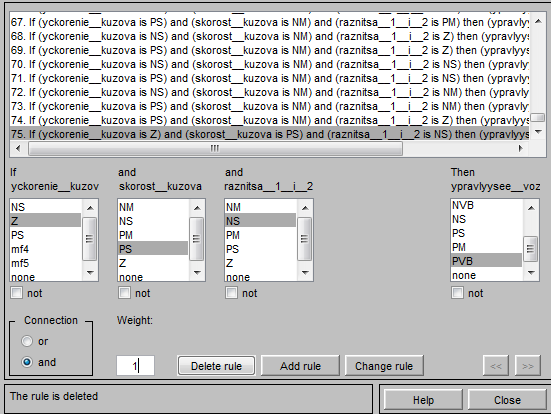
Рис. 18– Ввод новых дополнительных правил в Базу правил.

Рис.19–Определение выходного значения.


Рис.20– Просмотр поверхности системы нечеткого вывода.

Рис.21– Зависимость угла поворота регулятора от температуры воздуха
|
|
|
.
Для одной из исходных лингвистических переменных удалить одну функцию принадлежности. Оценить полученный результат

Рис.22–Удаление одной функции принадлежности в лингвистической переменной «Разница».

Рис.23–Определение выходного значения.

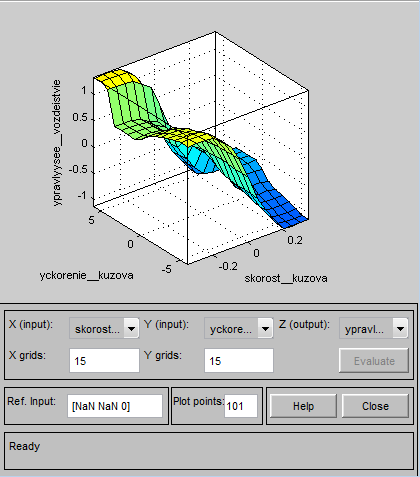
Рис.24– Просмотр поверхности системы нечеткого вывода.

Рис.25 – Зависимость угла поворота регулятора от температуры воздуха
Исследовать влияние неполноты базы правил. Для этого из базы правил убрать два правила

Рис.26– Удаление двух прежних правил из Базы правил.

Рис.27– Определение выходного значения.

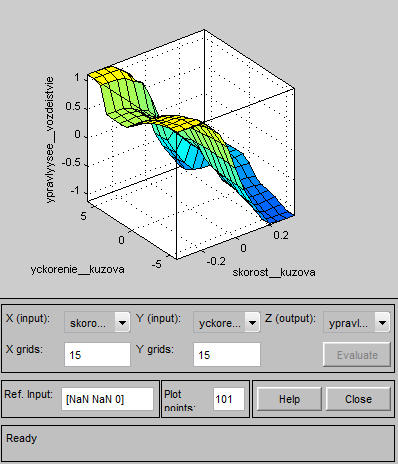
Рис.28– Просмотр поверхности системы нечеткого вывода.
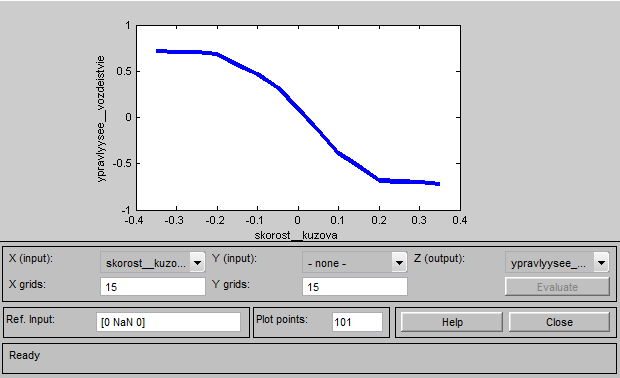
Рис.29– Зависимость угла поворота регулятора от температуры воздуха
Исследовать влияние типа вывода Сугено на выходной сигнал


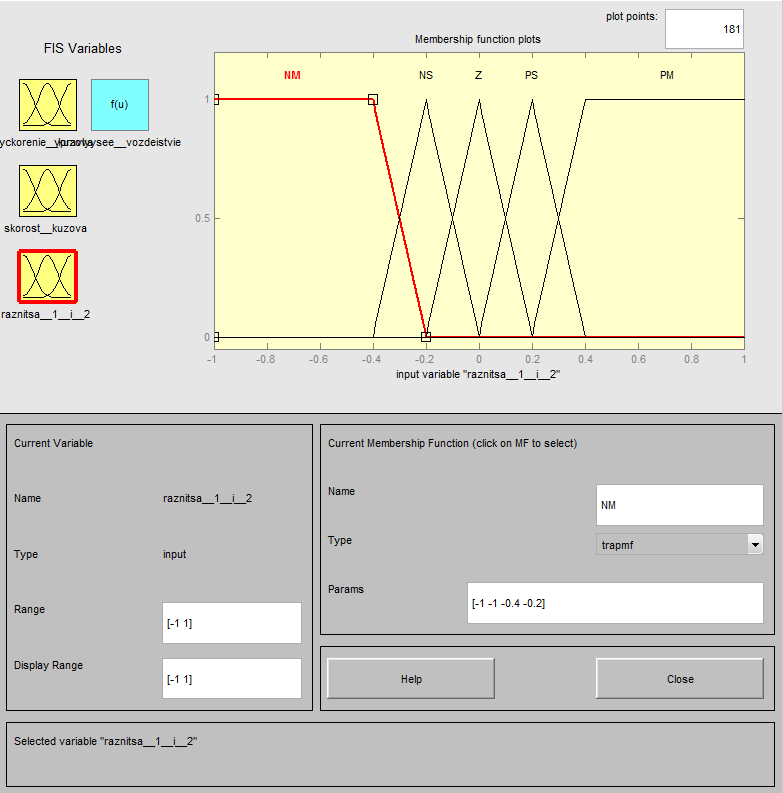

Рис. 30 – Редактор функций принадлежности.

Рис. 31 – Заполнение базы правил.


Рис. 32 – Определение выходного значения.
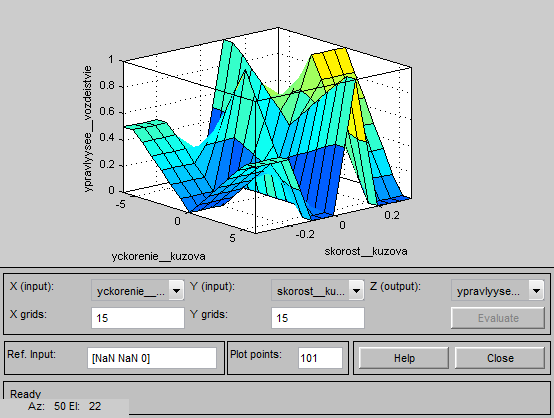

Рис. 33 – Просмотр поверхности системы нечеткого вывода.

Рисунок 34 – Зависимость угла поворота регулятора от температуры воздуха
Вывод:При выполнении данной лабораторной работыбыл создан проект погрузочно-разгрузочных работ в портах. Пользуясь методическим пособием и данными к лабораторной работе, быларазработана модель в среде fuzzyTECH, со структурой системы управления погрузочным краном.
|
|
|
Получены навыки исследования влияние вида функции принадлежности (трапециевидный, колоколообразный) на выходной сигнал системы. Получен результат лингвистической переменной с добавлением двух новых функций принадлежности. Получены навыки в исследовании избыточности базы правил. Так же исследовано влияние типа вывода Сугено на выходной сигнал.
Дата добавления: 2018-04-15; просмотров: 458; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!