База правил системы нечеткого вывода
МИНОБРНАУКИ РОССИИ
Федеральное государственное автономное образовательное
Учреждение высшего образования
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ИНСТИТУТ РАДИОТЕХНИЧЕСКИХ СИСТЕМ И УПРАВЛЕНИЯ
КАФЕДРА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ

Отчет
по лабораторной работе №2
«Исследование возможностей нечеткого
Моделирования в среде Matlab»
Вариант №2
по курсу:
«Моделирование систем управления»
Выполнили:
ст. группы РТбо3-7
Кошкальда Я.Ю.
Гладышев Д.А.
Проверила:
к.т.н., доцент к. САУ
Шестова Е.А.
Таганрог 2016 г.
Постановка задачи:
Большая часть транспортных средств имеет конструкцию так называемого пассивного подвешивания, т.е. неуправляемого вообще. Наиболее остро вопрос подвешивания транспортного средства стоит перед пассажирским транспортом, в частности, перед пассажирскими вагонами. Пассивное подвешивание не способно справиться со всеми возмущающими воздействиями со стороны пути на подвижную единицу. Из этого следует, что только переход на качественно иной уровень в конструкции подвешивания даст возможность улучшить плавность хода, а, следовательно, повысить качество обслуживания и продлить срок службы оборудования транспортного средства. Необходимо рассмотреть проблему нечеткого процесса управления контроллера подвешивания транспортного средства. Исследовать технологии и особенности процесса, изучить разработанную модель системы нечеткого управления.
|
|
|
Входные переменные:
Нечеткий контроллер, используемый в активном подвешивании, имеет три входа: ускорение кузова, скорость кузова, разница скоростей кузова и тележки. - ЛП ВА - «Вертикальное ускорение кузова». В качестве терм-множества ЛП ВА используется множество Т1 = {«Отрицательное», «Нулевое», «Положительное»} или в символьном виде Т1 = {NS, Z, PS}. Функции принадлежности ЛП ВА изображены на рис. 1 Для переменной «вертикальное ускорение кузова» диапазон изменения принят от -6 до +6 м/с2 .
\ 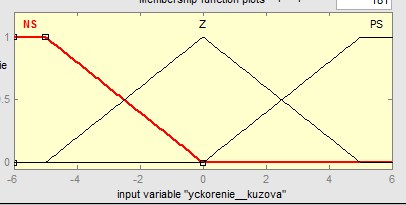
Рис. 1 - Функции принадлежностей переменной ЛП «Вертикальное ускорение кузова»
- ЛП ВV- «Вертикальная скорость кузова». В качестве терм-множества ЛП ВV используется множествоТ2 = {«Отрицательная средняя», «Отрицательная малая», «Нулевая», «Положительная малая», «Положительная средняя»} или в символьном виде Т2 = {NM, NS, Z, PS, PM}. Функции принадлежности ЛП ВV изображены на рис. 2 Для переменной «Вертикальная скорость кузова» принят диапазон изменения от -0,35 до +0,35 м/с.
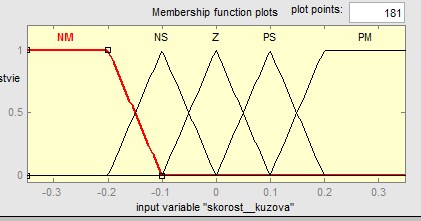
Рис. 2- Функции принадлежностей переменной ЛП «Вертикальная скорость кузова»
- ЛП ВDV - «Разница скоростей кузова и тележки вагона». В качестве терм-множества ЛП ВDV используется множество Т3 = {«Отрицательная средняя», «Отрицательная малая», «Нулевая», «Положительная малая», «Положительная средняя»} или в символьном виде Т3 = {NM, NS, Z, PS, PM}. Функции принадлежности ЛП ВDV изображены на рис. 3 Диапазон изменения этого параметра принят от -1 до +1 м/с.
|
|
|
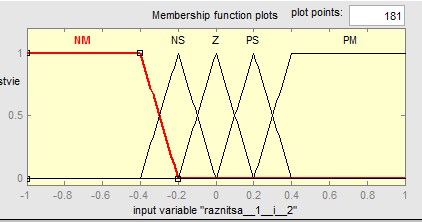
Рис. 3- Функции принадлежностей переменной ЛП «Разница скоростей кузова и тележки вагона»
Выходные переменные:
Выходом нечеткого контроллера является управ-ляющее воздействие. - ЛП Force- «Управляющее воздействие». В качест-ве терм-множества ЛП Force используется множество Т4 = {«Отрицательное очень большое», «Отрицательное большое», «Отрицательное среднее», «Отрицательное ма- лое», «Нулевое», «Положительное малое», «Положитель- ное среднее», «Положительное большое», «Положительное очень большое»} или в символьном виде Т4 = {NVB, NB, NM, NS, Z, PS, PM, PB, PVB}. Функции принадлежности ЛП Force изображены на рис. 4. Диапазон изменения управляющего воздействия принят от -2 до 2 H.
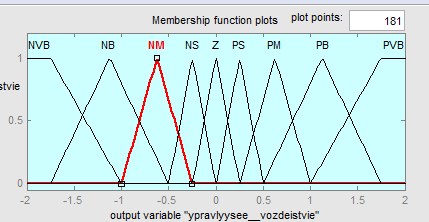
Функции принадлежностей ЛП «Force» (управляющее воздействие)
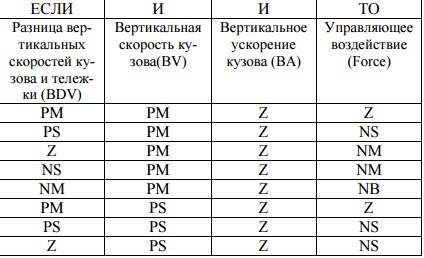
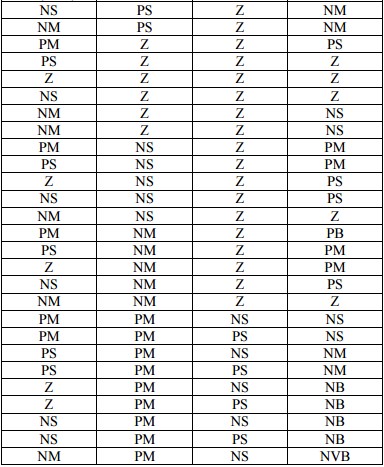
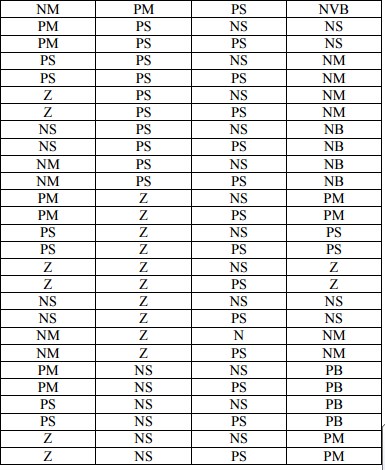
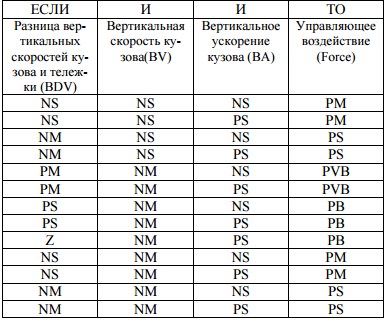
База правил.
Экспертная информация представлена в виде системы условных нечетких высказываний.
База правил системы нечеткого вывода
|
|
|
Таблица 1
Ход выполнения поставленной задачи:
Дата добавления: 2018-04-15; просмотров: 263; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!