Алгоритмы для расчета кинематики групп Ассура
III. Кинематический анализ механизма
Одним из основных средств снижения сроков создания новой техники является разработка систем автоматического проектирования (САПР). Теория механизмов и машин призвана обеспечить методическое и математическое содержание САПР, т.е. теорию, методы проектирования и математические модели механизмов, машин и систем машин. При этом возникает необходимость в создании надежных и устойчивых алгоритмов по всем разделам теории механизмов и машин.
Кинематика групп Ассура
При кинематическом анализе механизмов обычно выделяют три задачи: задачу о положениях, задачу о скоростях и задачу об ускорениях.
Эти задачи решаются последовательно, нельзя, например, решить сразу третью задачу, не решив предварительно две первых. Рассмотрим решение трёх задач кинематики для групп Ассура второго класса.
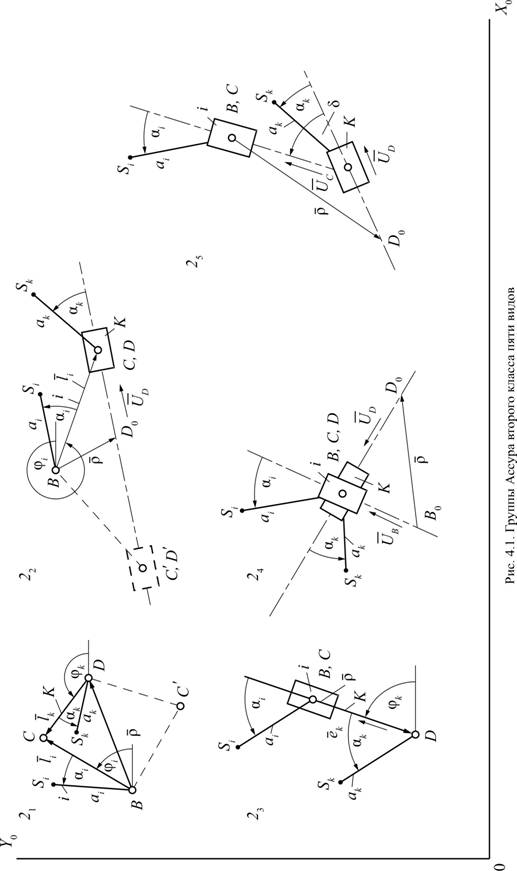
Вводимые обозначения.Рассмотрим рис. 3.1, на котором изображены группы второго класса пяти видов. Каждая группа включает в себя два звена и три кинематические пары. Одно из звеньев группы обозначим номером i, а второе – номером k. Внешние кинематические пары обозначим – B и D, а внутреннюю – C. Для того чтобы группа была кинематически определима, должны быть известны положения, скорости и ускорения внешних кинематических пар в неподвижной системе координат X0Y0Z0. Например, при решении задачи о положениях должны быть известны: для внешних вращательных пар – координаты центров этих пар, для внешних поступательных пар – координаты произвольной точки на оси пары и проекции единичного вектора оси пары. При аналитическом расчете упомянутые координаты и проекции единичных векторов являются входами в группы. Поскольку каждая группа второго класса имеет две внешние кинематические пары и одну внутреннюю, то для каждой группы необходимо задавать два входа. Сведем эти входы в таблицу.
|
|
|
Максимальное число элементов входов зафиксировано в группе четвертого вида, т.к. она включает в себя две внешние поступательные пары (см. рис. 3.1). При решении задач о скоростях и ускорениях должны быть известны первые и вторые производные от входов, используемые в задаче о положениях. Обозначая буквой и первые производные, а цифрой 2 вторые, составим еще две таблицы входов. Такое обозначение производных наиболее удобно при написании программ для вычисления машин.
Входы, приведенные в табл. 3.1, 3.2, 3.3, изменяются при движении механизма, поэтому назовем их переменными признаками групп. Кроме переменных признаков необходимо задавать постоянные признаки, к которым относятся длины звеньев, отрезки и углы, характеризующие положения центров масс звеньев. В соответствии с рис. 3.1сведем постоянные признаки групп в таблицу.
|
|
|
Таблица 3.1
Входы в группы при решении задачи о положениях
| Группа | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 21 | 
| 
| – | – | 
| 
| – | – |
| 22 |
|
| – | – |
|
| 
| 
|
| 23 |
|
| – | – |
|
| – | – |
| 24 |
|
| 
| 
|
|
|
|
|
| 25 |
|
| – | – |
|
|
|
|
Таблица 3.2
Входы в группы при решении задачи о скоростях
| Группа | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 21 | 
| 
| – | – | 
| 
| – | – |
| 22 |
|
| – | – |
|
| 
| 
|
| 23 |
|
| – | – |
|
| – | – |
| 24 |
|
| 
| 
|
|
|
|
|
| 25 |
|
| – | – |
|
|
|
|
Таблица 3.3
Входы в группы при решении задачи об ускорениях
| Группа | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 21 | 
| 
| – | – | 
| 
| – | – |
| 22 |
|
| – | – |
|
| 
| 
|
| 23 |
|
| – | – |
|
| – | – |
| 24 |
|
| 
| 
|
|
|
|
|
| 25 |
|
| – | – |
|
|
|
|
В этой таблице только первый столбец требует пояснений. При рассмотрении кинематики групп Ассура будет внесено определение величины δ – коэффициент, который учитывает сборку группы.
Таблица 3.4
Постоянные признаки групп
| Группа | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 21 | δ | lk | li | ai | ak | αi | αk |
| 22 | δ | – | li | ai | ak | αi | αk |
| 23 | – | – | – | ai | ak | αi | αk |
| 24 | – | – | – | ai | ak | αi | αk |
| 25 | δ | – | – | ai | ak | αi | αk |
Алгоритмы для расчета кинематики групп Ассура
|
|
|
Аналитический расчет основан на методе векторного замкнутого контура. Условимся для замыкания контура группы использовать вектор  , который проводим из центра кинематической пары Bв центр кинематической пары D для групп первого и третьего видов (см. рис. 3.1); из центра кинематической пары Bв точку D0 на оси поступательной пары для групп второго и пятого видов; из точки B0в точку D0для группы четвертого вида. Так как входы в группы должны быть заданы (табл. 3.1–3.3), то этот вектор всегда известен своими проекциями на оси X0,Y0, известны также первые и вторые производные от проекций.
, который проводим из центра кинематической пары Bв центр кинематической пары D для групп первого и третьего видов (см. рис. 3.1); из центра кинематической пары Bв точку D0 на оси поступательной пары для групп второго и пятого видов; из точки B0в точку D0для группы четвертого вида. Так как входы в группы должны быть заданы (табл. 3.1–3.3), то этот вектор всегда известен своими проекциями на оси X0,Y0, известны также первые и вторые производные от проекций.
3.2.1. Решение задачи о положениях группы 21
Исходные данные:
а) переменные (вход) – первая строка табл. 3.1;
б) постоянные – первая строка табл. 3.4.
Уравнение замкнутости контураBCD
 (3.1)
(3.1)
¨ в проекциях на оси X0Y0имеет вид
 ,
,
(3.2)
|
|
|
 .
.
Исключая угол  и одновременно вводя обозначения:
и одновременно вводя обозначения:
 ;
;  ;
;
(3.3)

получим трансцендентное уравнение:
 (3.4)
(3.4)
Это уравнение при помощи подстановки  приводится к алгебраическому. Его решение:
приводится к алгебраическому. Его решение:
 , (3.5)
, (3.5)
где δ –коэффициент, учитывающий сборку группы. Проверяем значение коэффициента δ: если группа расположена слева от вектора , то δ= –1, если справа – δ = +1 (пунктирные линии на рис. 3.1).
Далее получим:
 ;
;  . (3.6)
. (3.6)
С учетом (3.2) получим:
 ,
,
(3.7)
 .
.
3.2.2. Решение задачи о скоростях группы 21
Исходные данные:
а) переменные (вход) – первая строка таблицы 3.2;
б) постоянные – те же, что и в задаче о положениях.
Дифференцируем (3.2):
 ,
,
(3.8)
 .
.
Получена система двух уравнений с двумя неизвестными ωi, ωk коэффициенты и свободные члены которой имеют вид:
 ;
;  ;
;
 ;
;  ; (3.9)
; (3.9)
 ;
;  .
.
Решая систему, найдем угловые скорости звеньев:
 ,
,  , (3.10)
, (3.10)
 ;
;  ; (3.11)
; (3.11)
где  .
.
3.2.3. Решение задачи об ускорениях группы 21
Исходные данные:
а) переменные (вход) – первая строка таблицы 3.3;
б) постоянные – те же.
Дифференцируем (3.8):
 ,
,
 . (3.12)
. (3.12)
Снова получена система двух уравнений с двумя неизвестными  ,
,  . Коэффициенты при неизвестных останутся прежними (3.10), но изменятся свободные члены:
. Коэффициенты при неизвестных останутся прежними (3.10), но изменятся свободные члены:
 ,
,
(3.13)
 .
.
Решая систему, получим угловые ускорения звеньев.
3.2.4. Решение задачи о положениях группы 22
Исходные данные:
а) переменные (вход) – вторая строка таблицы 3.1;
б) постоянные – вторая строка таблицы 3.4.
Уравнение замкнутости контура BCDD0:
 , (3.14)
, (3.14)
¨ где S – расстояние от точки D0 до точки D.
Проектируем на оси X0Y0:
 ,
,
(3.15)
 .
.
Исключая угол  , получим квадратное уравнение
, получим квадратное уравнение
 , (3.16)
, (3.16)
где  ;
;  ; (3.17)
; (3.17)
 .
.
Решение уравнения:
 , (3.18)
, (3.18)
где  – коэффициент, учитывающий сборку группы. Проверкой убеждаемся в выборе значения коэффициента . Мысленно переносим вектор
– коэффициент, учитывающий сборку группы. Проверкой убеждаемся в выборе значения коэффициента . Мысленно переносим вектор  в точку В: если он с вектором
в точку В: если он с вектором  образует острый угол, то = +1, если тупой, = –1 (пунктирные линии на рис. 3.1).
образует острый угол, то = +1, если тупой, = –1 (пунктирные линии на рис. 3.1).
С учетом (3.2) найдем:
 ,
,
 . (3.19)
. (3.19)
3.2.5. Решение задачи о скоростях группы 22
Исходные данные:
а) переменные (вход) – вторая строка таблицы 3.2;
б) постоянные – те же.
Дифференцируем (3.15):
 ,
,
(3.20)
 .
.
Получена система двух уравнений с двумя неизвестными ωi, S1. Коэффициенты и свободные члены системы:
 ;
;  ;
;
;  ; (3.21)
; (3.21)
 ;
;  .
.
Решая систему, получим угловую скорость ωi и относительную скорость S1.
3.2.6. Решение задачи об ускорениях группы 22
Исходные данные:
а) переменные (вход) – вторая строка таблицы 3.3;
б) постоянные – те же.
Дифференцируем (3.20):
 ,
,
 . (3.22)
. (3.22)
Снова получим систему двух уравнений с двумя неизвестными  , S2. Коэффициенты системы остались прежними (3.21), свободные члены изменились и имеют вид:
, S2. Коэффициенты системы остались прежними (3.21), свободные члены изменились и имеют вид:
 ,
,
 .
.
Решая систему, получим угловое ускорение  и относительное ускорение S2.
и относительное ускорение S2.
3.2.7. Решение задачи о положениях группы 23
Исходные данные:
а) переменные (вход) – третья строка таблицы 4.1;
б) постоянные – третья строка таблицы 4.4.
Уравнение замкнутости контура BDB:
 , (3.23)
, (3.23)
где S – расстояние от точки D до точки С.
В проекциях на оси:
 ,
,
(3.24)
 .
.
Исключая угол  , получим:
, получим:
 . (3.25)
. (3.25)
С учетом (3.24) найдем:
(3.26)
 .
.
3.2.8. Решение задачи о скоростях группы 23
Исходные данные:
а) переменные (вход) – третья строка таблицы 3.2;
б) постоянные – третья строка таблицы 3.4.
Дифференцируем (3.24):
 ,
,
(3.27)
 .
.
Коэффициенты и свободные члены системы (3.27):
 ;
;  ;
;
 ;
;  ; (3.28)
; (3.28)
;  .
.
Решая систему, найдем относительную скорость S1 и угловую скорость  .
.
3.2.9. Решение задачи об ускорениях группы 23
Исходные данные:
а) переменные (вход) – третья строка таблицы 3.3;
б) постоянные – те же.
Дифференцируем (3.27):
 ,
,
 (3.29)
(3.29)
Коэффициенты системы (3.29) остаются прежними (3.28), свободные члены вычисляются из выражений
 ,
,
(3.30)

Решая систему, получим относительное ускорение S2 и угловое ускорение  .
.
3.2.10. Решение задачи о положениях группы 24
Исходные данные:
а) переменные (вход) – четвертая строка таблицы 3.1;
б) постоянные – четвертая строка таблицы 3.4.
Уравнение замкнутости контураB0CD0:
 . (3.31)
. (3.31)
В проекциях на оси:
 ,
,
(3.32)

Получена система двух уравнений с двумя неизвестными SB, SD.
Коэффициенты и свободные члены системы:
 ;
;  ;
;  ;
;  ;
;
(3.33)
 ;
;  .
.
Решая систему, найдем перемещения SB, SD, отсчитываемые от точек B0, D0.
3.2.11. Решение задачи о скоростях группы 24
Исходные данные:
а) переменные (вход) – четвертая строка таблицы 3.2;
б) постоянные – те же.
Дифференцируем (3.32):
 ,
,
(3.34)
 .
.
Свободные члены системы (3.34):
 ,
,
(3.35)
 .
.
Коэффициенты остались прежними (3.33). Решая систему, найдем SB1, SD1.
3.2.12. Решение задачи об ускорениях группы 24
Исходные данные:
а) переменные (вход) – четвертая строка таблицы 3.3;
б) постоянные – те же.
Дифференцируем (3.34):
 (3.36)
(3.36)

Свободные члены системы (3.36):
 ,
,
 (3.37)
(3.37)
Коэффициенты вычисляются из (3.33). Решая систему, найдем относительные ускорения SB2, SD2.
3.2.13. Решение задачи о положениях группы 25
Исходные данные:
а) переменные (вход) – пятая строка таблицы 3.1;
б) постоянные – пятая строка таблицы 3.4.
Уравнение замкнутости контураD0DB:
 (3.38)
(3.38)
В проекциях на оси X0Y0:
 ,
,
(3.39)
 .
.
Коэффициенты и свободные члены системы:
 ;
;  ;
;  ;
;  ;
;
(3.40)
 ;
;  .
.
Решая систему (3.39), найдем SD, SC. Проекции вектора  выражаются через проекции вектора
выражаются через проекции вектора  и угол
и угол  ,которые входят в исходные данные:
,которые входят в исходные данные:
 ,
,
(3.41)
 .
.
3.2.14. Решение задачи о скоростях группы 25
Исходные данные:
а) переменные (вход) – пятая строка таблицы 3.2;
б) постоянные – те же.
Дифференцируем (3.39):
 , (3.42)
, (3.42)
 .
.
Свободные члены системы (3.42):
 ;
;
(3.43)
 .
.
Коэффициенты сохраняют свои значения и вычисляются из (3.40).
Решая систему, найдем относительные скорости SD1, SC1. Входящие в уравнение (3.43) величины  ,
,  найдем дифференцированием уравнения (3.41):
найдем дифференцированием уравнения (3.41):
 ,
,
(3.44)
 .
.
3.2.15. Решение задачи об ускорениях группы 25
Исходные данные:
а) переменные (вход) – пятая строка табл. 3.3;
б) постоянные – те же.
Дифференцируем (3.43):
 (3.45)
(3.45)

Выделим свободные члены системы (3.45):
 ,
,
 (3.46)
(3.46)
Коэффициенты вычисляются из (3.40). При решении системы найдем относительные ускорения SD2, SC2. Входящие в (3.45)  ,
,  величины найдем дифференцированием (3.44):
величины найдем дифференцированием (3.44):
 ;
;  .
.
Кинематика начального звена
Рассмотрим два типа начальных звеньев (рис. 3.2). Звеном первого типа будем задавать вход во вращательную кинематическую пару какой-либо группы, а звеном второго типа – в поступательную пару. При вращении начальных звеньев будем получать выходные параметры, к которым отнесем координаты точки Н звена, первые и вторые производные от этих координат для звена первого типа и проекции единичного вектора  , их первые и вторые производные для звена второго типа. Сведем исходные данные для начальных звеньев и выходные параметры в таблицы (3.5, 3.6).
, их первые и вторые производные для звена второго типа. Сведем исходные данные для начальных звеньев и выходные параметры в таблицы (3.5, 3.6).
3.3.1. Решение задач кинематики начального звена
первого типа
С учетом рис. 3.2 и табл. 3.5 найдем координаты точки Н:
 ;
;  (3.47)
(3.47)
Проекции скорости точки Н:
 ;
;  . (3.48)
. (3.48)
Проекции ускорения:
 ;
;
(3.49)
 .
.
3.3.2. Решение задач кинематики начального звена
второго типа
Используя выражения (3.47), (3.48), (3.49), приняв XA = 0; YA = 0; l = 1:
 ;
;  ; (3.50)
; (3.50)
 ;
;  ; (3.51)
; (3.51)
 ; (3.52)
; (3.52)
 .
.
Таблица 3.5
Исходные данные для начальных звеньев
| Тип звена | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | l | a | α | XA | YA | ω | ε |
| 2 | – | a | α | XA | YA | ω | ε |
Таблица 3.6
Выходные параметры начальных звеньев
| Тип звена | 1 | 2 | 3 | 4 | 5 | 6 |
| 1 | XH | YH | XH1 | YH1 | XH2 | YH2 |
| 2 | UX | UY | UX1 | UY1 | UX2 | UY2 |
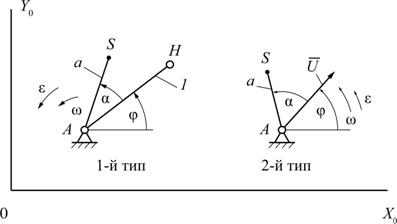
Рис. 3.2. Начальные звенья
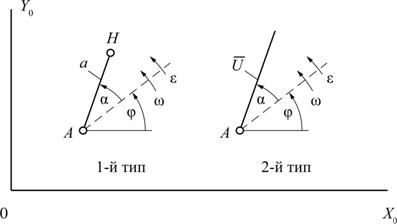
Рис. 3.3. Вспомогательные задачи
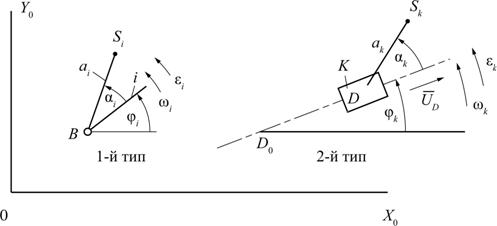
Рис. 3.4. К определению координат центров масс звеньев
Дата добавления: 2018-04-15; просмотров: 377; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!