Кинематика зубчатых механизмов с неподвижными осями вращения.
Для получения больших передаточных отношений применяются многоступенчатые передачи, составленные из нескольких простых зубчатых передач.
 Передаточное отношение всего механизма равно
Передаточное отношение всего механизма равно

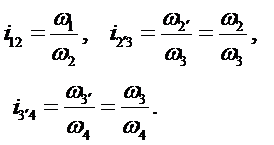
а передаточное отношение отдельных ступеней –
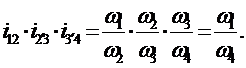
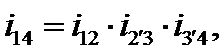
Передаточное отношение многоступенчатой передачи равно произведению передаточных отношений отдельных ступеней.
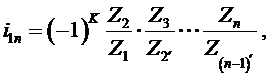
где K – число внешних зацеплений,(-1)K – направление вращения выходного звена.
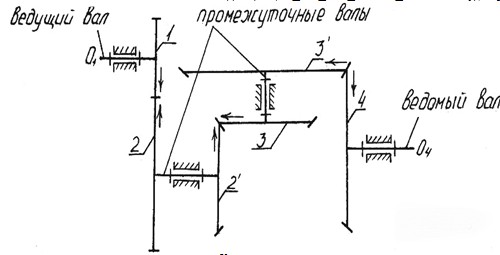
 Частным случаем многоступенчатой передачи является ступенчатый ряд с промежуточными колесами.
Частным случаем многоступенчатой передачи является ступенчатый ряд с промежуточными колесами.
Промежуточные колеса не влияют на величину общего передаточного отношения, но могут изменять его знак. Такие передачи применяются для изменения направления вращения ведомого звена, а также в случае передачи вращения между удаленными валами.
9. Планетарные механизмы. Типы планетарных передач.
Зубчатая передача в которой геометрическая ось хотя бы одного из колес подвижна называется планетарной.
Различные планетарные механизмы можно представить в виде 3х типов передач: дифференциальные, замкнутые, простые.
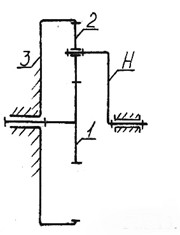 Простые планетарные обладают одной степенью подвижности у которой одно из основных звеньев закреплено неподвижно (для последовательной передачи потока мощности)
Простые планетарные обладают одной степенью подвижности у которой одно из основных звеньев закреплено неподвижно (для последовательной передачи потока мощности)
 Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н – водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н – водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
|
|
|
n = 3 – подвижные звенья,
PН = 3 – вращательные пары,
PВ = 2 – высшая пара.
Wn = 3∙3 – (2∙3 + 2) = 9 – 8 = 1 – число степеней свободы.
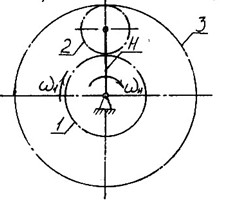
Дифференциальная передача – обладает 2-я степенями подвижности у которой все основные звенья подвижны, эти передачи позволяют суммировать 2 или несколько потоков мощности либо распределять их по независимым потребителям.
n = 4 – подвижные звенья,
PН = 4 – вращательные пары,
PВ = 2 – высшая пара.
Wn = 3∙4 – (2∙4 + 2) = 12 – 10= 2 – число степеней свободы.
Определенность движений звеньев у этого механизма будет задана в том случае если будут заданы законы движения 2х звеньев.
Кинематика зубчатых механизмов с подвижными осями вращения.
Зубчатая передача в которой геометрическая ось хотя бы одного из колес подвижна называется планетарной.
Различные планетарные механизмы можно представить в виде 3х типов передач: дифференциальные, замкнутые, простые.
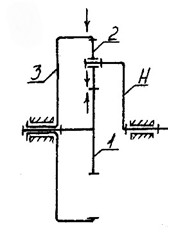
Простые планетарные обладают одной степенью подвижности у которой одно из основных звеньев закреплено неподвижно (для последовательной передачи потока мощности)
Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н – водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
|
|
|
n = 3 – подвижные звенья,
PН = 3 – вращательные пары,
PВ = 2 – высшая пара.
Wn = 3∙3 – (2∙3 + 2) = 9 – 8 = 1 – число степеней свободы.
Дифференциальная передача – обладает 2-я степенями подвижности у которой все основные звенья подвижны, эти передачи позволяют суммировать 2 или несколько потоков мощности либо распределять их по независимым потребителям.
n = 4 – подвижные звенья,
PН = 4 – вращательные пары,
PВ = 2 – высшая пара.
Wn = 3∙4 – (2∙4 + 2) = 12 – 10= 2 – число степеней свободы.
Определенность движений звеньев у этого механизма будет задана в том случае если будут заданы законы движения 2х звеньев.
Для определения передаточных чисел таких механизмов зависимости используемые для механизмов с неподвижными осями использовать нельзя.
Для вывода зависимостей связывающих угловые скорости механизмов имеющих подвижные оси воспользуемся методом обращения движения.
Допустим звенья имеют угловые скорости ω1, ω2, … ωН сообщим всем звеньям равную угловой скорости водило но противовположно ей направленную.
ω1Н = ω1 – ωН; ω2Н = ω2 – ωН; ω3Н = ω3 – ωН; ωНН = ωН – ωК = 0
|
|
|
Так как водило стало неподвижным, ωНН = 0, то мы получили обращенный механизм с обращенными осями.
Полученное уравнение – формула Виллиса для дифференциальных механизмов.
Для планетарного механизма угловая скорость равна 0, 
Дата добавления: 2018-04-05; просмотров: 326; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!