Тема: Устройство и принцип действия сейсмоприемников
Цель работы: Изучить устройство и принцип работы сейсмоприемников
Сейсмоприемник является первым звеном сейсморегистрирующего канала и представляет собой аппарат, воспринимающий механические колебания почвы и преобразующий их в электрические колебания. Поэтому, всякий сейсмоприемник представляет собой аппарат, состоящий из механической и электрической части. В настоящее время наибольшее применение находят инерционные приемники, в которых применяется инерционный принцип измерения механического движения. Существуют также сейсмоприемники давления, которые воспринимают изменения давления, происходящие при распространении упругой волны.
Сейсмоприемник – прибор, используемый в сейсморазведке для непосредственного приема механических колебаний почвы, возникающих при возвращении.
Сейсмоприемники предназначены для преобразования механических колебаний почвы в электрические колебания.
Существует большое число типов приемников механических колебаний почвы, отличающихся друг от друга по измеряемым параметрам колебаний, физическим явлениям, положенным в основу преобразования механических колебаний в электрические, по характеру применения и многим прочим признакам. По физическому явлению положенному в основу преобразования механических колебаний в электрические, различают: приемники с индукционным (электромагнитным и электродинамическим) преобразованием, пьезоэлектрические приемники, тензодатчики сопротивления (омические приемники), частотные (емкостные и индуктивные) приемники.
Существуют разнообразные типы электромеханических преобразователей; в каждом из них для преобразования колебаний используются различные явления: электромагнитная индукция, магнитострикция, пьезоэлектрический эффект и др. Каждому из этих типов преобразователей свойственны некоторые специфические особенности, делающие их пригодными для использования в приборах различного назначения. В наземных сейсмоприемниках применяют главным образом индукционные преобразователи, в которых механические колебания преобразуются в электрические на основе электромагнитной индукции.
Индукционные электромеханические преобразователи устроены так, что при перемещении инертной массы относительно корпуса изменяется магнитный поток, проходящий через витки катушки, являющейся частью преобразователя. В индукционных сейсмоприемниках магнитное поле создается постоянными магнитами, соединенными с корпусом прибора или с его инертной массой. Обычно применяют электродинамический преобразователь, представляющий собой катушку, которая может перемещаться в постоянном магнитном поле магнита. При перемещении катушки в магнитном поле в ее витках наводится электродвижущая сила (э.д.с).
В наземной сейсморазведке применяют приемники с индукционными преобразователями; в морской сейсморазведке используют преимущественно пьезоэлектрические приемники.
Приемник с индукционным преобразователем
Сейсмоприемники, основанные на индукционном преобразовании механической энергии колебания почвы в электрическую, состоят из следующих основных частей: корпуса, инертной массы, пружины, устройства для затухания собственных свободных колебаний (успокоитель или демпфер) и электромеханического преобразователя. Инертная масса соединена с корпусом сейсмоприемника при помощи одной или нескольких пружин и может перемещаться относительно корпуса. Поэтому, когда корпус сейсмоприемника, установленный на поверхности земли, совершает колебания вместе с почвой, инертная масса вследствие инерции перемещается относительно корпуса. Эти относительные перемещения инертной массы используют для создания изменяющегося электрического напряжения. В качестве инертной массы в сейсмоприемнике с электромагнитным преобразователем используется постоянный магнит, подвешенный на пружине к корпусу, в котором неподвижно закреплена катушка. В сейсмоприемниках с электродинамическим преобразователем в качестве инертной массы используется катушка, перемещается в магнитном поле постоянных магнитов, неподвижно закрепленных в корпусе сейсмоприемника.
При взаимном перемещении катушки и магнитного поля постоянных магнитов на концах катушки возникает электродвижущая сила (э. д. с.). Магнитное поле, возбужденное током, возникшем в катушке, взаимодействуя по закону Ленца с полем постоянных магнитов, будет создавать силу противодействующую её колебаниям – происходит процесс электромагнитного успокоения (демпфирования). С этой целью параллельно обмотки катушки включается постоянное сопротивление (шунт), изменяя величину которого можно ускорять или замедлять процесс затухания собственных колебаний сейсмоприёмника. В связи с большим весом инертной массы (магнита) в сейсмоприёмниках с электромагнитным преобразователем одного электромагнитного демпфирования недостаточно для быстрого приведения её в состояние покоя, поэтому применяют жидкостное успокоение – в стакан сейсмоприёмника заливают вязкое масло, гасящее колебание инертной массы. Последующие механические колебания сейсмоприёмника в свою очередь приведут к возникновению, а затем и к затуханию всех явлений, которые имели место в первом случае. Таким образом, демпфирование дает возможность последовательно регистрировать быстро следующие друг за другом механические колебания корпуса сейсмоприёмника, являющиеся следствием прихода сейсмических волн с различных глубин или с различной скоростью.
Свойства механической части сейсмоприемника зависят от величины инертной массы  , коэффициента
, коэффициента  упругости пружины и коэффициента
упругости пружины и коэффициента  вязкого трения демпфера. Кроме этих величин, в теории сейсмоприемников рассматриваются также следующие величины:
вязкого трения демпфера. Кроме этих величин, в теории сейсмоприемников рассматриваются также следующие величины:
 ,
,
 ,
,
где  — частота свободных колебаний инертной массы при отсутствии затухания;
— частота свободных колебаний инертной массы при отсутствии затухания;  — коэффициент затухания.
— коэффициент затухания.
Как видно из уравнения, частота свободных колебаний зависит от коэффициента упругости пружин и величины инертной массы . От соотношения между величинами и зависят форма и длительность свободных колебаний. Чем больше коэффициент , тем быстрее прекращаются свободные колебания инертной массы.
На рисунке 6.1 изображено устройство электродинамического сейсмоприемника. Магнит 1 впрессован в стальной корпус 2, образующий с железным вкладышем 3 магнитную цепь. В ее зазоре на двух ирисовых пружинах 4 и 5 подвешена катушка 6, играющая роль инертной массы. В верхней части прибора имеется система герметизации, исключающая возможность попадания влаги внутрь приемника. Затухание создается при помощи сопротивления 7, включенного параллельно обмотке катушки. Снизу к корпусу прикреплен штырь 8.
Для уменьшения помех, создаваемых в витках катушки наводками со стороны внешних электромагнитных полей, сейсмоприемники часто снабжают двумя одинаковыми катушками. Их обмотки соединены таким образом, чтобы э. д. с, создаваемая внешними полями, взаимно компенсировалась, в то время как э. д. с, возбуждаемая перемещением катушек в поле магнита приемника, складывается с одинаковым знаком.
Среди индукционных сейсмоприемников в настоящее время наибольшее распространение имеют приборы с электродинамическим преобразователем. Инертной массой в них является одна - две катушки с обмоткой, перемещающиеся в поле постоянных магнитов. Затухание электромагнитное.
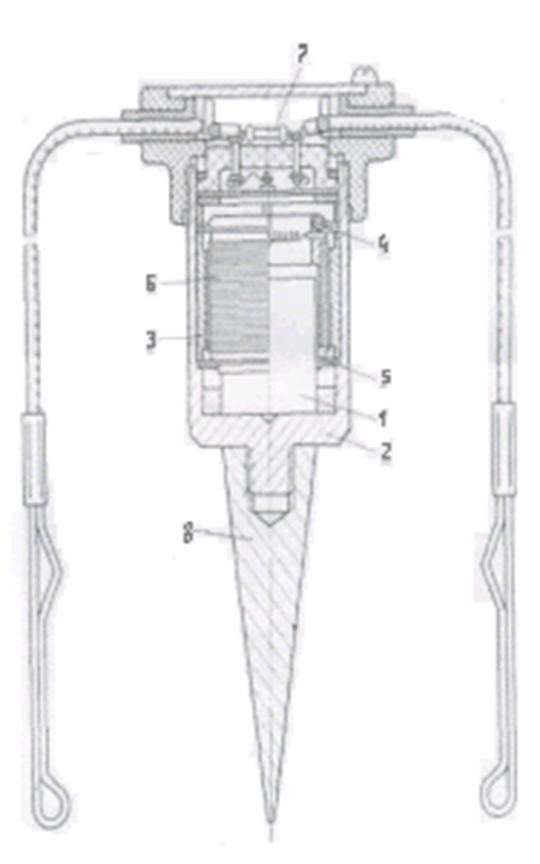
Рисунок 6.1 – Электродинамический сейсмоприемник
Дата добавления: 2018-04-05; просмотров: 3448; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!