Анализ влияния внутренней обратной связи по ЭДС двигателя. Компенсация влияния ЭДС двигателя
В системе регулирования электроприводом изменение ЭДС двигателя, возникающее при изменении его скорости, является для токового контура возмущением и приводит к отклонению тока якоря от значения, задаваемого входным сигналом. В пуско-тормозных режимах работы это приводит к снижению якорного тока ниже уровня токоограничения. По этой же причине происходит увеличение тока якоря в стопорных режимах, когда момент сопротивления значительно превышает максимально допустимое предельное значение для механизма.
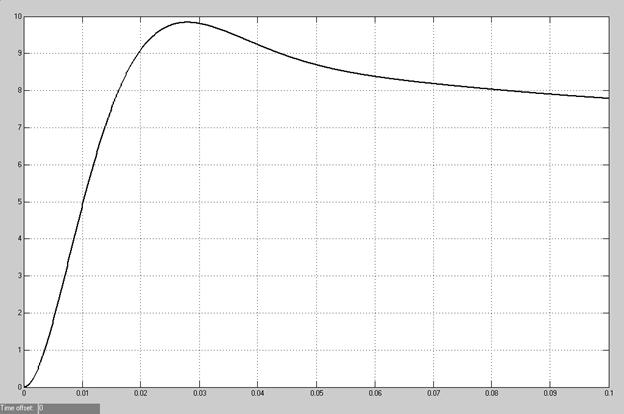
Рисунок 2.3- Зависимость  с обратной связью по ЭДС
с обратной связью по ЭДС
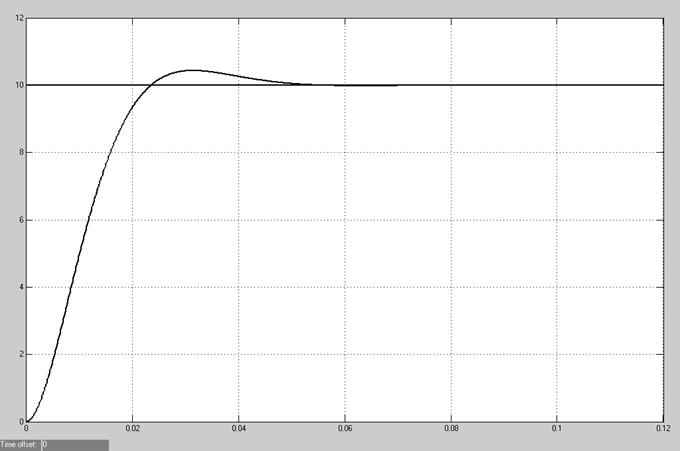
Рисунок 2.3- Зависимость без обратной связи по ЭДС
Определим величину относительной ошибки по току от действия ЭДС двигателя и сравним ее с указанной допустимой ошибкой.
Относительная величина недоиспользования двигателя по току в %

Заданная допустимая ошибка в контуре тока при постоянном задании тока составляет  .
.
Поскольку полученное значение относительной ошибки по току превышает заданное, то необходима компенсация ЭДС двигателя.
Для этого на вход регулятора тока заводится положительная гибкая обратная связь по ЭДС, но так как электропривод работает при постоянном магнитном потоке, то можно использовать сигнал обратной связи по скорости (рисунок. 2.4).
Передаточная функция компенсирующего звена имеет вид
 ,
,
где  .
.
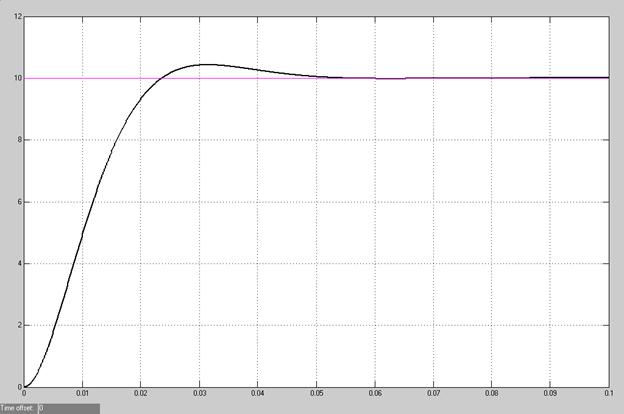
Рисунок 2.5 - Зависимость при компенсации обратной отрицательной связи по ЭДС
|
|
|
Оценка нарастания скорости якорного тока
Одним из параметров требующих ограничения быстродействия системы регулирования, является предельная скорость нарастания якорного тока  Это ограничение накладывается условиями коммутации двигателя постоянного тока и особенностями механического оборудования исполнительного механизма (ограничение скорости нарастания момента).
Это ограничение накладывается условиями коммутации двигателя постоянного тока и особенностями механического оборудования исполнительного механизма (ограничение скорости нарастания момента).
Скорость нарастания якорного тока определяется из выражения:
 ,
,
где  - относительное значение заданного тока в контуре;
- относительное значение заданного тока в контуре;
 ,
,
Допустимая скорость нарастания якорного тока в соответствии с заданием на курсовой проект составляет  , поэтому необходимы дополнительные меры по ограничению скорости нарастания якорного тока.
, поэтому необходимы дополнительные меры по ограничению скорости нарастания якорного тока.
Для ограничения скорости нарастания якорного тока используется задатчик интенсивности тока (ЗИТ) с постоянной времени  .
.
 ,
,
где  - напряжение нелинейного элемента.
- напряжение нелинейного элемента.
Структурная схема ЗИТ представлена на рисунке 2.6.
Рисунок. 2.6-Структурная схема ЗИТ
Построение контура регулирования скорости
Контур регулирования скорости. Оценка заданной точности регулирования
Рассчитаем статическую просадку скорости при номинальной нагрузке и сделаем вывод о необходимом типе регулятора скорости.
|
|
|
В системе регулирования с П-регулятором скорости статический момент приводит к просадке скорости, равной

Статическая ошибка по положению 

Такая статическая просадка по положению с точки зрения технологии не допустимо большая, поэтому применим двухкратноинтегрирующую систему регулирования скорости, структурная схема которой приведена на рисунке 2.6. Где контур регулирования тока является внутренним по отношению к контуру регулирования скорости. Передаточная функция замкнутого контура тока имеет вид оптимальной передаточной функции второго порядка.
Коэффициент регулятора скорости
 .
.
Передаточная функция регулятора скорости

Так как в числителе регулятора скорости есть форсирующее звено, то это приведет к увеличению перерегулирования тока. Для компенсации на вход регулятора скорости ставится фильтр, имеющий передаточную функцию
 .
.
Передаточная функция замкнутого контура регулирования тока имеет вид
 .
.
Дата добавления: 2018-04-05; просмотров: 755; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!