Задание 1. Демодуляция АМ-сигнала. Порядок выполнения работы:
Порядок выполнения работы:
1) Зададим временной массив t: 0≤t≤1;
2) Зададим линейные частоты модулирующего  и несущего
и несущего  колебаний.
колебаний.
3) Зададим амплитуду несущего сигнала  . Для модулирующего сигнала зададим амплитуду
. Для модулирующего сигнала зададим амплитуду  , постоянную составляющую
, постоянную составляющую  , и начальную фазу колебаний
, и начальную фазу колебаний  .
.
4) Зададим коэффициент модуляции m: 0<m≤1 (при m>1 наступает перемодуляция (избыточная модуляция)), простые демодуляторы (типа квадратичного детектора) демодулируют такой сигнал с сильными искажениями.
5) Сгенерируем несущий сигнал и модулирующий сигнал, используя входные параметры:
 ;
;
 ;
;
6) Сгенерируем амплитудно-модулированный сигнал  :
:
 ;
;
Т.к. , то:
 ;
;
7) Сгенерируем массив случайных величин (соразмерный с массивом t), распределенных по нормальному закону в интервале (0, 1) [белый шум  ]. Зададим его амплитуду
]. Зададим его амплитуду  . В канале связи будет создаваться аддитивная помеха, т.е. сигнал на входе приемника будет иметь вид:
. В канале связи будет создаваться аддитивная помеха, т.е. сигнал на входе приемника будет иметь вид:
 ;
;
8) Проведем фильтрацию принимаемого сигнала .
Операция линейной дискретной фильтрации в общем случае описывается следующим образом:
 ;
;
 — отчёты входного сигнала;
— отчёты входного сигнала;
 — отчёты выходного сигнала;
— отчёты выходного сигнала;
 — постоянные коэффициенты;
— постоянные коэффициенты;
Максимальное из чисел  и
и  называется порядком фильтра.
называется порядком фильтра.

Рис 1. Цифровой рекурсивный фильтр
Передаточная функция фильтра имеет вид:
 ;
;
В среде MatLab используется функция  .
.
9) Зададим параметры фильтра:
 ;
;
 ;
;
Проведем операцию демодуляции принимаемого сигнала.
|
|
|
10) Вычислим отношение сигнал/шум по формуле:
 ;
;
Листинг программы
clear all;
%Заданные параметры
t=0:0.001:1;%Массив отсчетов времени
fc=150; %Частота несущего сигнала
fm=10; %Частота модулирующего сигнала
Uc0=2; %Амплитуда несущего колебания
Um0=5; %Амплитуда модулирующего сигнала
U0=2; %Постоянная составляющая модулирующего сигнала
Un0=0.1; %Амплитуда белого шума
fi0=pi/3; %Начальная фаза модулирующего колебания
m=1; %Коэффициент модуляции
b=ones(1,3);%Коэффиент b цифрового фильтра
a=1; %Коэффициент a цифрового фильтра
%Вычисления
Uc=Uc0*cos(2*pi*fc*t); %Несущее гармоническое колебание
Um=U0+Um0*cos(2*pi*fm*t+fi0); %Модулирующий гармонический сигнал
Uam=Uc0.*(1+m*Um/max(abs(Um))).*cos(2*pi*fc*t); %АМ-сигнал
Un=Un0*randn(size(t)); %Белый шум с МО=0 и СКО=1
Ud=Uam+Un; %Сигнал + шум
Udmd=filter(b,a,abs(Ud)); %Демодулированный сигнал
%Построения графиков
subplot(5,1,1),plot(t,Um),title ('Модулирующий сигнал')
subplot(5,1,2),plot(t,Uc ,title ('Несущее колебание')
subplot(5,1,3),plot(t,Uam),title ('АМ сигнал')
subplot(5,1,4),plot(t,Ud), title ('Сигнал + шум')
subplot(5,1,5),plot(t,Udmd),title ('Отфильтрованный сигнал')

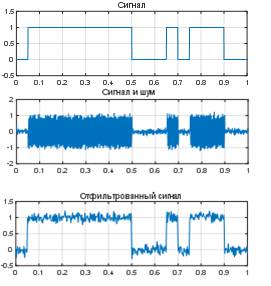
Задание 2. Фильтрация сигналов для демодуляции амплитудно-манипулированных сигналов в гауссовских каналах связи.
Проделаем задание 2 аналогично заданию 1 с той лишь разницей, что в качестве модулирующего сигнала будет выступать битовая последовательность.
|
|
|
Длительность импульса  с;
с;
Листинг программы
clear all;
%Заданные параметры
t=0:0.05:1; %Массив отсчетов времени
fc=25; %Частота несущего сигнала
fm=fc/5; %Частота модулирующего сигнала
Uc0=7; %Амплитуда несущего колебания
Um0=13; %Амплитуда модулирующего сигнала
U0=3; %Постоянная составляюща модулирующего сигнала
fi0=pi/2; %Начальная фаза модулирующего колебания
%Вычисления
%Битовая последовательность Um
for i=1:1:length(t)
if t(i) > 0&& t(i)<0.05
d(i) = 0;
elseif t(i) > 0.01&& t(i)<0.1
d(i) = 1;
elseif t(i) > 0.2&& t(i)<0.4
d(i) = 1;
elseif t(i) > 0.45&& t(i)<0.6
d(i) = 1;
elseif t(i) > 0.6&& t(i)<0.9
d(i) = 1;
elseif t(i) > 0.9
d(i) = 0;
end
end
Um=d;
Uc=Uc0*cos(2*pi*fc*t); %Несущее колебание
Uam=Uc0.*(1+m*Um/max(abs(Um))).*cos(2*pi*fc*t); %АМ-сигнал
Un=Un0*randn(size(t)); %Белый шум
Ud=Uam+Un; %Белый шум + АМ-сигнал
Udmd=filter(b,a,abs(Ud)); %Демодулированный сигнал
%Графики
subplot(1,1,1),plot(t,Um),title ('Сигнал')
subplot(1,1,2),plot(t,Uc),title ('Несущее колебание')
subplot(1,1,3),plot(t,Uam),title ('AM сигнал')
subplot(1,1,4),plot(t,Ud),title ('Сигнал и шум'),
|
|
|
subplot(1,1,5),plot(t,Udmd),title ('Отфильтрованный сигнал')


Рис 2. Временное представление модулирующей битовой последовательности, детектируемого сигнала и демодулированного сигналов 

Задание 3. Обнаружение детерминированного импульсного сигнала  на фоне АБГШ.
на фоне АБГШ.
Проделаем задание 2 аналогично заданию 1 с той лишь разницей, что в качестве модулирующего сигнала будет выступать битовая последовательность.
Длительность импульса с;
Порядок выполнения работы:
1) Введём известные данные и посчитаем порог Байса для принятия решения  :
:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 – гипотеза о том, что в сигнале
– гипотеза о том, что в сигнале  присутствует
присутствует  ;
;
 – гипотеза о том, в сигнале отсутствует ;
– гипотеза о том, в сигнале отсутствует ;
2) Из теории проверки статистических гипотез имеем:
Условная плотность распределения процесса  в дискретные моменты времени t1,…,tm имеет вид при наличии сигнала:
в дискретные моменты времени t1,…,tm имеет вид при наличии сигнала:
w(y1,…,ym , t1,…,tm/s(t)≠0)= 
при отсутствии сигнала:
w(y1,…,ym , t1,…,tm/s(t)=0)=  ,
,
где y1,…,ym – значение процесса в моменты времени t1,…,tm . Приведенные плотности распределения позволяют построить процедуру проверки гипотез о наличии или отсутствии сигнала, когда на вход приемника поступает аддитивная смесь сигнала и шума, распределенного по нормальному закону.
|
|
|
Необходимо проверить соотношение:

Так как помеха, сгенерированная в задании 2, имеет математическое ожидание МО=0 и среднеквадратическое отклонение СКО=1, то:


 , следовательно, на основании критерия Байеса принимается гипотеза (в сигнале присутствует ).
, следовательно, на основании критерия Байеса принимается гипотеза (в сигнале присутствует ).
Листинг программы
clear all;
%Заданные параметры
t=0:0.001:1; %Массив отсчетов времени
fc=25; %Частота несущего сигнала
fm=fc/5; %Частота модулирующего сигнала
Uc0=7; %Амплитуда несущего колебания
Um0=13; %Амплитуда модулирующего сигнала
U0=3; %Постоянная составляюща модулирующего сигнала
fi0=pi/2; %Начальная фаза модулирующего колебания
%Вычисления
%Битовая последовательность Um
for i=1:1:length(t)
if t(i) > 0&& t(i)<0.05
d(i) = 0;
elseif t(i) > 0.01&& t(i)<0.1
d(i) = 1;
elseif t(i) > 0.2&& t(i)<0.4
d(i) = 1;
elseif t(i) > 0.45&& t(i)<0.6
d(i) = 1;
elseif t(i) > 0.6&& t(i)<0.9
d(i) = 1;
elseif t(i) > 0.9
d(i) = 0;
end
end
Um=d;
Uc=Uc0*cos(2*pi*fc*t); %Несущее колебание
Uam=Uc0.*(1+m*Um/max(abs(Um))).*cos(2*pi*fc*t); %АМ-сигнал
Un=Un0*randn(size(t)); %Белый шум
Ud=Uam+Un; %Белый шум + АМ-сигнал
Udmd=filter(b,a,abs(Ud)); %Демодулированный сигнал
U1=Un.^2;
U2=Um.^2;
U3=U1+U2;
U4=U3';
L=sum(U4);
%Графики
subplot(1,1,1),plot(t,Um),title ('Сигнал')
subplot(1,1,2),plot(t,Udmd),title ('Сигнал и шум’)
subplot(1,1,3),plot(t,Udmd),title ('Отфильтрованный сигнал')
subplot(1,1,4),plot(t,L), title ('График правдоподобия')

Дата добавления: 2018-02-28; просмотров: 407; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!