Методические указания
Очень часто для управления достаточно исполнительных механизмов, имеющих только два рабочих состояния. Эти механизмы называются двухпозиционными или бинарными. Они похожи на электрический выключатель: включен – есть ток, выключен – тока нет. К двухпозиционным исполнительным механизмам, в частности, относятся магнитные клапаны, электромагнитные реле и электронные твердотельные выключатели. Для управления такими механизмами достаточно одного-двух бит, которые легко можно получить на выходе управляющего компьютера. Управляющий сигнал можно усиливать простым переключателем, а не сложным линейным усилителем.
Бинарные исполнительные механизмы бывают с одним (monostable) и двумя (bistable) устойчивыми состояниями. Исполнительный механизм с одним устойчивым состоянием, которому соответствует отключение питания, управляется только одним сигналом. Дистанционный контактор электродвигателя обычно является устройством такого типа. Пока на контактор приходит управляющий сигнал, двигатель получает питание, но как только сигнал пропадает, питание выключается.
Устройство с двумя устойчивыми состояниями сохраняет свое текущее состояние до тех пор, пока не получит новый управляющий сигнал, изменяющий его. Можно сказать, что исполнительный механизм «помнит» свое последнее положение. Например, чтобы привести в движение цилиндр, управляемый магнитным клапаном с двумя устойчивыми положениями, необходимы один сигнал для открытия и другой сигнал для закрытия. Исполнительные механизмы с двумя устойчивыми состояниями управляются импульсными, а не аналоговыми сигналами.
|
|
|
Уровень мощности выходного сигнала компьютера обычно очень мал: уровень напряжения "мощного" выходного сигнала лежит между +2 В и +5 В, а «маломощного» – менее 1 В. Максимальный ток зависит от присоединенной нагрузки, но, как правило, он менее 20 мА. Обычный выходной порт компьютера выдает мощность порядка 100 мВт. Это означает, что для управления большинством исполнительных механизмов сигнал компьютера нужно усилить. Для этого используются управляемые выключатели.
Наиболее распространенным электрически изолированным выключателем в системах управления всегда было электромеханическое реле. Реле – надежный выключатель, который может работать как на переменном, так и на постоянном токе. Ток, протекающий по обмотке реле, создает магнитное поле, перемещающее якорь из одного положения в другое. Таким образом, размыкаются и замыкаются электрические контакты, которые сами по себе могут пропускать токи, значительно большие, чем требуется для управления собственно реле. Типичный ток обмотки реле составляет около 0.5 А при напряжении 12В, поэтому реле нельзя управлять непосредственно с выхода компьютера; требуется промежуточный выключать средней мощности, например транзисторный усилитель, который устанавливается между выходом компьютера и реле. При проектировании систем с реле всегда необходимо помнить о проблемах энергоснабжения, поэтому при снятом питании реле должно принимать безопасное положение. Другими словами, отключение питания релейной системы не должно приводить к нежелательному поведению присоединенной нагрузки.
|
|
|
Существуют различные типы реле в широком диапазоне мощностей от милливольтовых поляризованных реле до киловаттных контакторов. Маломощные поляризованные реле для коммутаций сигналов небольшой мощности существуют в исполнении на платах расширения компьютера. Реле для больших мощностей слишком велики для этого и устанавливаются отдельно, чаще всего в закрытых стойках. Дополнительным преимуществом реле является то, что их работа хорошо знакома монтажникам и обслуживающему персоналу.
Среди недостатков реле следует отметить их относительно низкое быстродействие – переключение требует порядка нескольких миллисекунд, вместо микросекунд для электронных устройств. У реле, так же как и у механических выключателей бывает так называемое дребезжание контактов (раздел 4.3.1), которое может вызвать помехи, что в свою очередь влияет на измерительную аппаратуру и электронику компьютера.
|
|
|
Твердотельные полупроводниковые приборы (solid-state semiconductor) применяются для переключении больших мощностей, поскольку лишены многих недостатков реле. Твердотельный выключатель имеет управляющий вход, присоединенный к устройству управления. Твердотельные силовые выключатели могут приводиться в действие непосредственно выходными сигналами цепей цифровой. гики, поэтому их довольно просто использовать в компьютерном управлении.
Различные типы управляемых выключателей используются для коммутации малых и средних мощностей. Интегральные схемы с транзисторным выходом моя использовать до напряжений порядка 80 В и токов до 1.5 А; такие схемы управляются выходным сигналом компьютера. Когда уровень выходного сигнала компьютера превышает 2.4 В, ток, управляемый электронным выключателем, протекает через исполнительный механизм, а когда уровень сигнала ниже 0.4 В, транзистор заперт и ток не течет. В такой конфигурации транзистор работает как простой насыщающийся усилитель.
|
|
|
Для больших мощностей конструкция выключателя может основываться на пороговых транзисторах (discrete power transistors) или полевых МОП - транзисторах (полевой транзистор со структурой металл-оксид-полупроводник, Metal-Oxide-Semiconductor Field-Effect Transistor – MOSFET). Такие цепи могут пропускать те 5-10 А и выдерживать разность потенциалов более 100 В. Из-за наличия внутреннего сопротивления при прохождении тока транзистор рассеивает некоторую энергию, поэтому, чтобы избежать перегрева, их нужно монтировать с учетом требований охлаждения.
При управлении большими мощностями (> 100 Вт) между выходом компьютера и электронным выключателем не должно быть прямых электрических связей, в противном случае выключатель является источником помех, которые могут повлиять на работу компьютера. Кроме того, при пробое выключателя высокое напряжение, предназначенное для питания привода, может повредить компьютер через прямую электрическую связь. Чтобы избежать указанных проблем, необходима гальваническая развязка, например схема с использованием оптической передачи сигнала управления, включающая светодиод и фототранзистор, расположенные вблизи друг друга и исключающие прямой электрический контакт.
Важный класс полупроводниковых выключателей – тиристоры. Типичными представителями этого класса являются симметричный триодный тиристор, или симистор (TRIode AC semiconductor – Triacs), и однооперационный триоидный тиристор, или однооперационный тринистор (Silicon-Controlled Rectifier – SCR). Другое название этих полупроводниковых приборов – управляемые твердотельные выпрямители (solid-state controlled rectifiers).
После того как тиристор, включенный управляющим импульсом, «поджигается», он будет оставаться включенным до тех пор, пока через него течет ток. Другими словами, в отличие от силового или полевого транзистора тиристор не выключается, когда исчезает управляющий сигнал. Тиристор не отключается даже если приложенное напряжение падает до нуля. Отключение происходит только в том случае, если управляющее напряжение меняет знак – вынужденная коммутация. Тиристоры чаще всего используются для отключения переменных токов, потому что изменение полярности через одинаковые промежутки времени, по крайней мере один раз за период, позволяет погасить тиристор при отсутствии управляющего импульса – естественная коммутация.
Тиристоры могут управлять значительно большими мощностями, чем силовые или полевые транзисторы. В проводящем состоянии внутреннее сопротивление тиристора практически равно нулю, соответственно, падение напряжения и выделение тепла минимальны, и ими можно пренебречь.
Если отключать исполнительное устройство с индуктивностью – например, электродвигатель или обмотки соленоида – с помощью обычного выключателя, то могут возникнуть проблемы. Напряжение на индукторе исполнительного устройства равно
 ,
,
где L – индуктивность, a i – ток исполнительного устройства. Если ток отключается достаточно быстро, напряжение на индуктивности в процессе отключения может стать значительным (рис. 5.1).

Рис. 5.1. Броски напряжения, возникающие в индуктивном исполнительном
механизме при размыкании выключателя
Броски напряжения могут повредить выключатель, поэтому их необходимо гасить. Для этого можно использовать разрядный (шунтирующий) диод (free-wheeling diode), подключенный параллельно нагрузке (рис. 5.2).
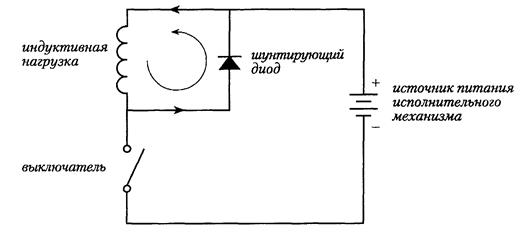
Рис. 5.2. Применение шунтирующего диода для гашения бросков напряжения, возникающих при отключении индуктивных нагрузок.
При размыкании выключателя ток индуктивности протекает через диод. Напряжение на исполнительном устройстве ограничено величиной менее 1 В, что соответствует падению напряжения на диоде. Выключатель должен выдерживать только номинальное напряжение, а не перенапряжения. Ток индуктивности через разрядный диод затухает экспоненциально; скорость затухания можно увеличить, включая последовательно с диодом резистор.
Термин привод (drive system) обозначает комбинацию двигателя с управляющей электроникой. Применение управляющих схем значительно улучшает функциональные свойства электродвигателя, позволяя регулировать скорость и момент в широких пределах и с высокой точностью. Большинство исполнительных механизмов, используемых в системах управления, являются аналоговыми, например двигатели постоянного тока, синхронные и асинхронные двигатели переменного тока. Широко применяются и шаговые двигатели, но их системы управления заметно отличаются от приводов непрерывного действия. Привод может быть частью другого механизма, например системы позиционирования клапана, манипулятора робота и т. д. Обычный CD-плейер содержит приводы для вращения диска и позиционирования держателя считывающего лазерного датчика. При этом и скорость диска, и положение головки должны выдерживаться с высокой точностью. В этом разделе рассмотрены наиболее важные аспекты точного управления электроприводом.
Управляющий клапан (control valve) состоит из тела клиновидной или цилиндрической формы (иногда называется тарелкой), закрепленного на стержне (штоке), который движется вверх и вниз относительно цилиндрического седла. Стержень обычно перемещается под давлением сжатого воздуха на поршень или диафрагму с пружиной. Пружина может либо открывать, либо закрывать клапан в зависимости от того, какое положение требуется в случае прекращения подачи сжатого воздуха. Иногда для управления потоком используется электрический или гидравлический привод. Конструкции тела и седла клапана различаются в зависимости от требований к соотношению между производительностью и потерями напора на клапане, типа жидкости и расхода при разных положениях штока.
Размер клапана обычно выбирают в соответствии с параметрами трубопровода, в котором он устанавливается. Выбор формы клапана и сочетания размеров седла и тела (тарелки) требует оценки следующих факторов.
• Потери напора (pressure drop). Большие потери напора на клапане могут затруднить движение штока. Специальная конструкция клапана заставляет поток двигаться в противоположных направлениях через два запирающих элемента, тем самым уравновешивая силы. Необходимость снижения потерь напора может потребовать применения различных типов клапанов, например типа «бабочка» (butterfly valve).
• Максимальный расход (maximum flowrate). Это требование сводится к сочетанию максимального расчетного расхода с максимальной зоной управления. Последняя должна в идеале составлять 30-50 % от расчетного расхода. Иногда неопытные специалисты задают эту величину на уровне 10 %, что заметно ухудшает рабочие характеристики.
• Управляемость (rangeability). Это отношение расходов при двух различных положениях штока. Оно в основном связано с конструкцией тела и седла и зависимостью потерь напора от расходных характеристик, которые, в свою очередь, связаны с характеристиками нагнетающего насоса. Управляемость должна обеспечивать номинальный диапазон расходов с соответствующими зонами управления (желательно 30-50 %) по обе стороны диапазона.
• Чувствительность (sensitivity). Связана с управляемостью и величиной управляющего воздействия, необходимого для управления с заданной точностью. Иногда большой клапан обеспечивает номинальный расход, а малый, установленный параллельно, обеспечивает необходимую чувствительность.
• Линейность (linearity). Желательно, чтобы в контуре управления существовала линейная зависимость между выходами регулятора и датчика, т. е. в цепочке «клапан – процесс – датчик». Если контур управления не обладает линейной зависимостью выходных и входных величин, ее можно обеспечить выбором характеристик клапана, а иногда и датчика. Качество управления при отсутствии линейности может оказаться низким, или потребуется реализация специальных способов управления.
• Гистерезис (hysteresis). Это обычная проблема управляющих клапанов, возникающая из-за процессов сухого трения (прилипания) в месте прилегания запорного элемента клапана к седлу, а также потерь напора на клапане. Как правило, гистерезис является причиной небольших постоянных колебаний в контуре управления, для борьбы с которыми можно применять устройства точного позиционирования клапана. Это специальное устройство управления с большим коэффициентом усиления, которое обеспечивает нужное положение штока клапана. В этом случае управляющий компьютер не осуществляет точного контроля за открытием клапана, а только вырабатывает опорные значения для устройства позиционирования клапана.
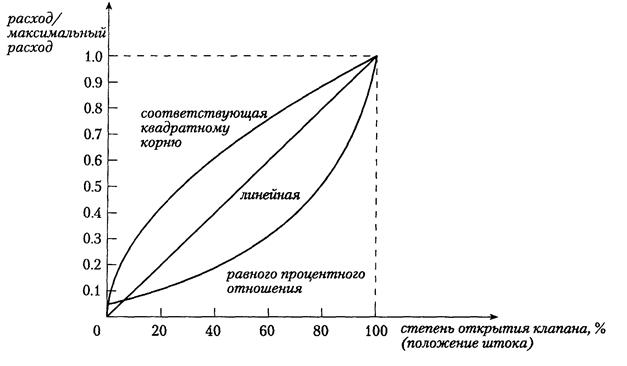
Рис. 4.34. Характеристики клапанов.
Управляемость клапана можно определить на основании расчета двух расходов, равных, например, 15 и 85 % от максимального расхода. В этом случае необходим знать функцию  , которая характеризует клапан. Клапаны поставляются со следующими характеристиками:
, которая характеризует клапан. Клапаны поставляются со следующими характеристиками:
 – линейная,
– линейная,
 – соответствующая квадратному корню,
– соответствующая квадратному корню,
 – равного процентного отношения (где конструктивная постоянная А обычно лежит в пределах от 20 до 50).
– равного процентного отношения (где конструктивная постоянная А обычно лежит в пределах от 20 до 50).
Эти зависимости показаны на рис. 5.3. Следует отметить, что идеальный клапан равного процентного отношения не закрывается полностью. На практике их проектируют таким образом, чтобы получить линейную характеристику при очень малых открытиях, и, следовательно, они закрываются полностью.
Дата добавления: 2015-12-21; просмотров: 17; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!