Формирует адрес, по которому из памяти микрокоманд необходимо
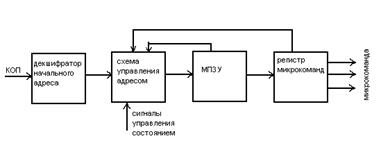
Рис. 8. Структура простейшего устройства микропрограммного управления
считать первую микрокоманду. Считанный код микрокоманды уходит на управление различными узлами операционной части, вместе с этим это код содержит признак смещения, по которому определяется адрес следующей микрокоманды. На следующем тактовом сигнале по новому адресу из памяти микрокоманды читается новое содержимое. И так до тех пор, пока в микрокоманде не появится признак конца команды, этот признак увеличит содержимое считанной команды на 1, и из ПЗУ прочитается следующий КОП. Идея была предложена в 50-х годах. На сегодня схемы типа РТ. РР, РФ обеспечивают удобства в применении такого способа. Обратная связь из регистра микрокоманд обеспечивает изменение текущего адреса микрокоманды. Связи жесткие и они определяют последовательность в выполнение микрокоманд. Для операций ветвления необходимы адреса переходов. Эти адреса вырабатываются из МПЗУ и совместно с управлением (смещением) изменяют следующий адрес микрокоманды. Для анализа текущих результатов (признаков) выполнения на схему управления адреса из операционного блока поступают сигналы управления состоянием – признаки (флаги), формируемые другими устройствами. В результате адрес следующей микрокоманды зависит от трех групп сигналов: 1) смещение 2) адреса перехода, если он используется 3) признаков (флагов) из операционного блока. Запаздывание смещение на один такт от адреса перехода объясняется необходимостью записи этого адреса в регистр схемы управления.
Введение регистра адреса перед МПЗУ задерживает выполнение на один такт, позволяет организовать конвейер, т.е. уменьшить время такта, которое определяется быстродействием МПЗУ. На практике МПЗУ требуется большой разрядности: от нескольких десятков до сотен бит. Поэтому регистр адреса вводят редко. В качестве МПЗУ схемы с пережогом связей (К155РТ2, К566 РТХХ). Блок микропрограммного управления при использовании схем СИС и БИС аппаратно не мал. Поэтому иногда, в специальных процессорах его выполняют в виде одной БИС – управляющей памяти. Эти БИС, как правило, масочнопрограммируемые. Содержимое неизменно. Аппаратные затраты сокращаются, но изменять микрокоманды нельзя.
Вопросы для самопроверки
1. Укажите основные принципы программного управления.
2. Какой критерий лежит в основе программного управления?
3. Возможно ли, зная число тактов и число циклов при выполнении команды, определить время ее выполнения?
4. Расшифруйте сокращение К О П.
5. Назовите преимущества и недостатки программного управления с жесткими связями.
6. Поясните механизм использования перепрограммируемой памяти для реализации устройства управления.
7. Что такое схемы программируемой матричной логики и как они могут быть использованы в устройствах программного управления?
8. Дайте понятие микрокоманды.
9. Назовите преимущества и недостатки микропрограммного способа управления.
10. Что такое псевдомикропрограммирование?
Дата добавления: 2015-12-20; просмотров: 32; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!