Понятие о мехатронных узлах и системах современных металлообрабатывающих станков.
Основные определения мехатроники.
Историю мехатроники принято отсчитывать с 1969 года, когда японская фирма Yaskava Electric ввела новый термин "Мехатроника" как комбинацию слов "Механика" и "Электроника". В 1972 году фирма зарегистрировала этот термин как товарный знак. Первоначально мехатронными системами считались только регулируемые электроприводы. Затем сюда стали относить автоматические двери административных, торговых, медицинских учреждений, торговые автоматы, мобильные средства (например, электромобили,современные автокары) и др. В 80-х годах класс мехатронных систем пополнился станками с числовым программным управлением, промышленными роботами и новыми видами бытовых машин (посудомоечных, стиральных и т.п.). В последнее десятилетие очень большое внимание уделяется созданию мехатронных модулей для современных автомобилей (стеклоподъемники), нового поколения технологического оборудования (станков с параллельной кинематикой, роботов с интеллектуальным управлением), микромашин, новейшей компьютерной и офисной техники.
Современная робототехника возникла во второй половине XX столетия, когда в ходе развития производства появилась реальная потребность в универсальных манипуляционных машинах-автоматах, и одновременно возникли необходимые для их создания научно-технические предпосылки и, прежде всего, кибернетика и вычислительная техника.
|
|
|
Современными предшественниками МС явились различного рода устройства для манипулирования на расстоянии объектами, непосредственный контакт человека с которыми опасен или невозможен. Это манипуляторы с ручным или автоматизированным управлением.
Первые серьезные результаты по созданию и практическому применению роботов в СССР относятся к 1960-м гг. В 1966 г. в институте ЭНИКмаш (г. Воронеж) был разработан автоматический манипулятор с простым цикловым управлением для переноса и укладывания металлических листов. Первые промышленные образцы современных промышленных роботов с позиционным управлением были созданы в 1971 г. (УМ-1, "Универсал-50", УПК-1). В 1968 г. был создан первый управляемый ЭВМ подводный автоматический манипулятор
К концу 1980 г. парк промышленных роботов в стране превысил 6000 шт., что находилось, например, на уровне парка роботов США, и составлял более 20% парка роботов в мире, а к 1985 г. превысил 40 тыс. шт., в несколько раз превзойдя парк роботов США и достигнув 40% мирового парка.
Мехатроника находится только в стадии становления, поэтому на сегодняшний день ее определение и базовая терминология еще полностью не сформирована. Поэтому представляется целесообразным рассмотреть некоторые определения, выражающих суть предмета мехатроники как в широком, так и в узком (специальном) смысле.
|
|
|
Мехатроника изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, систем, машин и комплексов машин с интеллектуальным управлением их функциональными движениями.

Рис. 1.1. Определение мехатронных систем.
Комментарии к определению:
Мехатроника изучает новый методологический подход (в некоторых работах даже используются более укрупненные понятия - "философия", "парадигма") в построении машин с качественно новыми характеристиками.
Важно подчеркнуть, что этот подход является весьма универсальным и может быть применен в машинах и системах различного назначения.
В определении подчеркивается синергетический характер интеграции составляющих элементов в мехатронных объектах. Синергия (греч.) - это совместное действие, направленное на достижение общей цели. При этом принципиально важно, что составляющие части не просто дополняют друг друга, но объединяются таким образом, что образованная система обладает качественно новыми свойствами.
|
|
|
В мехатронике все энергетические и информационные потоки направлены на достижение единой цели - реализации заданного управляемого движения.
Базовыми объектами изучения мехатроники являются мехатронные модули, которые выполняют движения, как правило, по одной управляемой координате. Из таких модулей, как из функциональных кубиков, компонуются сложные системы модульной архитектуры.
Мехатронные системы предназначены, как следует из определения, для реализации заданного движения. Специфика задач автоматизированного машиностроения состоит в реализации перемещения выходного звена - рабочего органа технологической машины (например, инструмента для механообработки). При этом необходимо координировать управление пространственным перемещением МС с управлением различными внешними процессами. Примерами таких процессов могут служить регулирование силового взаимодействия рабочего органа с объектом работ при механообработке, контроль и диагностика текущего состояния критических элементов МС (инструмента, силового преобразователя), управление дополнительными технологическими воздействиями (тепловыми, электрическими, электрохимическими) на объект работ при комбинированных методах обработки, управление вспомогательным оборудованием комплекса (конвейерами, загрузочными устройствами и т.п.), выдача и прием сигналов от устройств электроавтоматики (клапанов, реле, переключателей). Такие сложные координированные движения мехатронных систем принято называть функциональными движениями.
|
|
|
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Краткий вывод.
В состав мехатронной системы входят следующие основные компоненты:
- механическое устройство, конечным звеном которого является рабочий орган;
- блок приводов, включающий силовые преобразователи и исполнительные двигатели;
- устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть;
- сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении МС.
Таким образом, наличие трех обязательных частей - механической (точнее электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком, отличающим мехатронные системы.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (например, тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев и требуемое движение рабочего органа.
Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления (УКУ). В состав УКУ мехатронной системы обычно входят компьютер верхнего уровня и контроллеры управления движением.
Устройство компьютерного управления выполняет следующие основные функции:
Управление процессом механического движения мехатронного модули или многомерной системы в реальном времени с обработкой сенсорной информации.
Организация управления функциональными движениями МС, которая предполагает координацию управления механическим движением МС и сопутствующими внешними процессами. Как правило, для реализации функции управления внешними процессами используются дискретные входы/выходы устройства (на схемах они обычно обозначаются I/O).
Взаимодействие с человеком-оператором через человеко-машинный интерфейс в режимах программирования и непосредственно в процессе движения МС.
Организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование информации о цели управления, поступающей с верхнего уровня, в целенаправленное функциональное движение системы с управлением на основе принципа обратной связи.
Характерно, что электрическая энергия используется в современных системах как промежуточная энергетическая форма. Таким образом, для физической реализации мехатронной системы теоретически необходимы четыре основных функциональных блока: последовательно соединенные информационно-электрический и электромеханический энергетические преобразователи в прямой цепи и электро-информационный и механико-информационный преобразователи в цепи обратной связи.
Примечание. Если работа силовой части машины с энергетической точки зрения основана на гидравлических, пневматических или комбинированных (например, электрогидравлических) процессах, то очевидно необходимы соответствующие преобразователи и датчики в цепи обратной связи.
Сущность мехатронного подхода состоит в том, что он направлен на интеграцию конкретного класса элементов (механических, электронных, компьютерных, электротехнических, интерфейсных и др.), которые имеют принципиально различную физическую природу и предназначены для реализации сложного функционального движения. Аппаратное объединение элементов в единые конструктивные модули должно обязательно сопровождаться разработкой интегрированного программного обеспечения. Программные средства МС должны обеспечивать непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени. Таким образом, проектирование МС предполагает разработку комплекса аппаратно-программных средств, ориентированных на конкретные прикладные задачи..
Контрольные вопросы.
Классификация и обозначения станков.
Какие движения относятся к основным?
Как по внешнему виду отличить универсальный станок от станка с программным управлением?
Приложения к учебному пособию. Модуль 2.
Раздел 1. Технологическое и электротехническое оборудование машиностроительного производства
Рис.1. Блок- схемы систем управления.
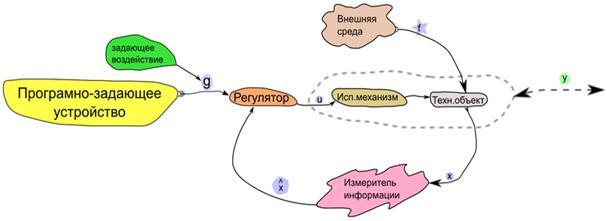
Рис.2.Упрощщенная схема САУ
Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
Замкнутые САУ
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь входа системы с его выходом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной задающим устройством программы управления, то есть не учитывается управлением влияние возмущений на характеристики процесса и осуществляется без контроля результата. Примеры таких систем: компьютер, часы, магнитофон и т. п. В свою очередь различают:
Разомкнутые по задающему воздействию 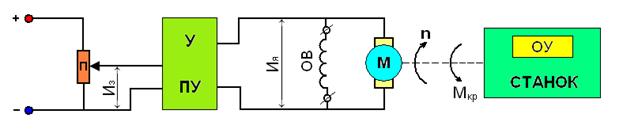 Рис.3.Простейшая разомкнутая принципиальная схема управления двигателем постоянного тока с параллельным возбуждением.
Рис.3.Простейшая разомкнутая принципиальная схема управления двигателем постоянного тока с параллельным возбуждением.
Дата добавления: 2015-12-20; просмотров: 23; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!