Линейных ускорений подвижных объектов
В качестве устройств для измерения углов и угловых скоростей подвижных объектов применяют гироскопические приборы. С помощью гироскопических приборов определяют также курсовые углы и направление истинной вертикали в летательных аппаратах. Для повышения точности этих измерительных устройств пользуются различного рода корректирующими устройствами (магнитный компас, физический маятник, астроследящие системы и т. п.). Такие гироскопические приборы называют гироскопическими стабилизаторами. Существуют одноосные, двухосные и трехосные гироскопические стабилизаторы.
Одноосные гироскопические стабилизаторы. У стабилизаторов этого типа ось Oz ротора 1 (рис. IV.32) с помощью разгрузочного устройства (электрический двигатель 4 и редуктор 3) удерживается на направлении, перпендикулярном к плоскости наружной рамки 2.

Рис. IV.32. Схема одноосного гироскопического стабилизатора.
Принцип действия такого стабилизатора состоит в следующем. От действия возмущающего момента Му относительно наружной рамки возникает угловая скорость прецессии р и появляется гироскопический момент Мг = Яр, направленный в сторону, противоположную моменту Му. При увеличении угла поворота р возрастает напряжение 0П, снимаемое с потенциометра 6. Это напряжение усиливается в электронном усилителе 5 и поступает на моментный двигатель 4, который создает разгрузочный момент Мр, совпадающий по направлению с гироскопическим. В результате момент внешних сил уравновешивается суммой двух моментов (гироскопическим и разгрузочным).
|
|
|
Будем считать, что разгрузочное устройство можно описать следующим выражением:
Мр = — &рР. (IV. 106)
В этом случае при малых углах § одноосный стабилизатор можно описать уравнениями

 (IV. 107)
(IV. 107)
где Jр — момент инерции рамки; k'Д и k"Д — коэффициенты скоростного трения; Н — кинетический момент ротора; J0 - момент инерции ротора.

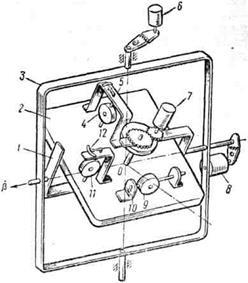
Рис. IV.33. Схема двухосного гироскопического Рис. IV.34. Схема трехосного гироскопического стабилизатора. стабилизатора.
Из соотношения (IV. 107) исключим р, тогда уравнение одноосного стабилизатора будет иметь вид

Одноосные гиростабилизаторы обычно являются частью двухосных или трехосных стабилизаторов.
Двухосные гироскопические стабилизаторы. Платформа двухосного гиростабилизаторы (рис. IV.33) имеет две степени свободы относительно летательного аппарата. Карданов подвес гиростабилизатора состоит из платформы 1, представляющей собой внутреннюю рамку, и наружной рамки 2. На платформе установлены два двухстепенных гироскопа .4 и 9. Углы поворота кожухов гироскопов измеряются датчиками 13 и 14, сигналы с которых поступают через электронные усилители 7 и 10 на моментные электродвигатели 5 и 11. Эти электродвигатели и редукторы 6 и 12 являются разгрузочными устройствами. Для управления положением платформы применены моментные датчики 3 и 8.
|
|
|
Двухосные гиростабилизаторы обеспечивают стабилизацию платформы в заданной плоскости. Угол поворота наружной рамки не имеет ограничения. Угол поворота внутренней рамки ограничен примерно 50°.
Для двухосного гиростабилизатора составляют две пары дифференциальных уравнений вида (IV. 107).
Трехосные гироскопические стабилизаторы. Гиростабилизаторы этого типа обеспечивают пространственную угловую стабилизацию платформы; применяют их в качестве измерителей курса и вертикали автопилотов. На рис IV.34 изображена упрощенная схема трехосного гиростабилизатора, состоящего из платформы 2, установленной в кардановом подвесе (с внутренней 1 и внешней 3 рамками). На платформе 2 установлены гироскопы 4, 9 и 11, имеющие относительно платформы по две степени свободы. На осях платформы установлены моментные двигатели 6, 7 и 8. Углы поворота кожухов гироскопов измеряются датчиками 5, 10 и 12. С помощью трехосного гироскопического стабилизатора можно измерить углы тангажа, курса и крена с высокой степенью точности.
|
|
|
В системах стабилизации летательных аппаратов в качестве устройств для измерения углов и угловых скоростей применяют дифференцирующие и интегрирующие гироскопы (см.гл. VIII).
В последнее время для повышения точности измерения углов отклонения летательных аппаратов стали применять гироскопы, в которых отсутствуют быстровращающиеся роторы. К ним в первую очередь следует отнести вибрационные (рис. IV.35) и лазерные гироскопы.
В вибрационных гироскопах гироскопический момент возникает от действия колебаний камертона относительно его опоры. Когда в стержнях камертона 3 возникают колебания в противофазе, возбуждаемые устройствами 4 и 5, за счет переносной угловой скорости ог основания камертона (точка О) появляется периодический момент кориолисовых сил. От их действия вилка камертона на ножке 1 будет совершать колебательное движение относительно оси Oz. Амплитуда крутильных колебаний φ, регистрируемая датчиком 2, пропорциональна измеряемой угловой скорости ωz.
Для увеличения чувствительности вибрационного гироскопа его параметры подбирают такими, чтобы частоты собственных колебаний камертона и его крутильных колебаний совпадали. В этом случае данная механическая система близка к резонансной.
|
|
|
Устройства для измерения линейных ускорений подвижных объектов (акселерометры). Пружинный акселерометр (рис. IV.36) предназначен для измерения линейных ускорений в инерционных навигационных системах. Как видно из рис. IV.36, чувствительным элементом акселерометра является инерционная масса 2, подвешенная на двух пружинах 1, связанных с корпусом 4, прикрепленным к летательному аппарату. При действии постоянного линейного ускорения х масса т перемещается на величину ft, при которой инерционная сила FH = mh, возникающая от ускоренного движения массы, уравновешивается силой пружины Fn = ch, где с — жесткость пружины.
Для успокоения колебаний массы применен демпфер 3, создающий силу F А «= kji, пропорциональную скорости перемещения массы. Выходной сигнал с/в снимается с потенциометра 5.
Уравнение движения массы для измерения линейных ускорений можно записать в виде
 (IV. 108)
(IV. 108)


Рис. IV.35. Вибрационный гироскоп Рис. IV.36. Схема устройства для измерения линейных
Ускорений
Разделим все члены уравнения (IV. 108) на с, тогда получим
 (IV. 109)
(IV. 109)
где  - постоянная времени акселерометра;
- постоянная времени акселерометра;  - степень успокоения.
- степень успокоения.
Определим зависимость динамической ошибки акселерометра от его параметров. Для этого введем следующие переменные:  — перегрузка летательного аппарата;
— перегрузка летательного аппарата;  собственная частота колебаний массы, где hmax — максимальная величина хода массы, при которой сохраняется линейная зависимость между Uви h, т. е. UB = k1h. Введем безразмерное время τ = ω0 t; тогда динамическая ошибка
собственная частота колебаний массы, где hmax — максимальная величина хода массы, при которой сохраняется линейная зависимость между Uви h, т. е. UB = k1h. Введем безразмерное время τ = ω0 t; тогда динамическая ошибка 
(где h0- установившееся значение перемещения) может быть получена из решения уравнения (IV. 109) в виде
 (IV.110)
(IV.110)
Определим ξopt, при котором соблюдается условие ε = εдоп. В этом случае
 (IV.111)
(IV.111)
Из выражения (IV. 110) при соблюдении условия (IV. 111) найдем
 (IV. 112)
(IV. 112)
отсюда
 (IV. 113)
(IV. 113)
Минимальное значение τ = τmin определим, подставляя ξopt и ε = εдоп в выражение (IV.110), т. е.
 (IV. 114)
(IV. 114)
С помощью выражений (IV. 113) и (IV. 114) можно найти ξopt и τmin, соответствующие различным значениям εдоп. Числовые данные приведены ниже.
едоп..................................... 0 0,025 0,05 0,1 0,25
ξopt.................................... 1,00 0,76 0,69 0,59 0,40
τmln..................................... со 2,83 2,60 2,32 1,95
Минимальное значение времени переходного процесса определяется по формуле
 (IV. 115)
(IV. 115)
Для измерения путевой скорости полета летательных аппаратов применяют интегрирующие акселерометры, в которых непрерывно выполняется интегрирование ускорения.
Дата добавления: 2015-12-17; просмотров: 24; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!