Устройства для измерения перемещений, скоростей и
УСКОРЕНИЙ
Устройства для измерения перемещений широко применяют в системах автоматического регулирования в качестве технических средств определения размеров деталей и уровней жидкостей. В этих устройствах чувствительный и выходной элементы часто объединяются в один элемент. Так, например, в индуктивных устройствах в качестве чувствительного элемента используют якорь, а в емкостных — подвижную пластину конденсатора.
Реостатные и потенциометрические устройства. Реостатные устройства, предназначенные для съема сигналов, преобразуют выходное перемещение чувствительного элемента в постоянный или переменный ток за счет изменения величины своего электрического сопротивления. На рис. IV.5 показаны схемы реостатных датчиков.
Потенциометрическое устройство, приведенное на рис. IV.5, а, преобразует угловое перемещение, а в величину r электрического сопротивления между клеммами 0 и 1 на выходе.
Допустим, что реостат 3 имеет равномерную намотку по окружности, и на единицу длины окружности приходится ρОм. Если радиус контактной рукоятки R, то величина электрического сопротивления r на выходе между клеммами Си/ будет
r = Rap. (IV. 19)
Чувствительность такого устройства
 (IV.20)
(IV.20)
На рис. IV.5, б дана схема сопротивления с прямолинейным перемещением движка. В этом устройстве входной величиной служит х, выходной — напряжение ин, снимаемое с резистора.
|
|
|
Потенциометр 1 выполнен в виде калиброванного проводника с движком. Согласно схеме, приведенной на рис. IV. 5, б, напишем следующие уравнения:

 (IV.21)
(IV.21)


|
где U0 и i — напряжение и ток источника питания; R0 — полное
сопротивление потенциометра; R1 и R2 — сопротивление частей
потенциометра (до движка и после него); i1. и i2 — токи в сопротив-
лениях Rl и RH; I0 — длина потенциометра.
Решая эти уравнения относительно uн, найдем
 (IV.22)
(IV.22)
Наибольшее значение произведения R2R1 будет R02 / 4. Если Rv намного больше R0, т. е. RH > R0 / 4, то
 (IV.23)
(IV.23)
т. е. выходная величина пропорциональна входной.
Чувствительность схемы
 (IV.24)
(IV.24)
Погрешность потенциометров зависит от целого ряда факторов, к которым в первую очередь можно отнести зону - нечувствительности, неравномерность характеристики, влияние люфта, влияние нагрузки.
. Погрешность, обусловленная зоной нечувствительности, вызывается тем, что выходной сигнал не изменяется при перемещении щетки в пределах одного витка. Поэтому сопротивление реостата изменяется скачкообразно (рис. IV.6). Будем считать, что ширина ступени равна шагу намотки /, а сопротивление одного витка r1тогда при витках потенциометра ωимеем зону нечувствительности
|
|
|
 (IV.25)
(IV.25)
или относительных единицах
 (IV.26)
(IV.26)
Погрешность, вызванная неравномерностью характеристик, зависит от непостоянства диаметра наматываемого провода, непостоянства шага намотки и т. п. Степень неравномерности характеристик
ΔRн = Rис – Rр (IV.27)
где Rнс — истинное сопротивление потенциометра, замеренное в различных точках; Rp — расчетное сопротивление, определяемое по формуле: 
В относительных единицах степень неравномерности обычно определяется следующим образом: 
Степень неравномерности у реостатов и потенциометров изменяется в зависимости от точности. Среднее значение £2 для реостатов (потенциометров) низкого класса точности составляет 1,0-2,0%; среднего класса точности — 0,25-0,5%, прецизионных — 0,05 - 0,1%.
Погрешность реостата или потенциометра с круглым сечением, вызванная влиянием люфтов, определяется по формуле
 (IV.28)
(IV.28)
где Δл — радиальный зазор между осью и втулкой реостата; р — угол, под которым намотана обмотка; rд— радиус от оси до контактной поверхности.
Относительная погрешность будет составлять
 (IV.29)
(IV.29)

|
|
|
|
Для уменьшения погрешности, вызванной влиянием люфта, применяют специальные пружины.
Определим теперь, какое влияние оказывает нагрузка на потенциометрический датчик. Для этого воспользуемся рис. IV.5, б. Внутреннее сопротивление потенциометра определим по формуле
 (IV.30)
(IV.30)
где а — относительное перемещение щетки.
Из формулы (IV.30) имеем:  (IV.31)
(IV.31)
Ток в нагрузке определяется выражением
 (IV.32)
(IV.32)
где uбн — напряжение, снимаемое с потенциометра при отключенной нагрузке.
Ток в нагрузке можно определить также по формуле
 (IV.33)
(IV.33)
Используя формулы (IV.31)—(IV.33), получим
 (IV.34)
(IV.34)
где
 .
.
Неравномерность выходного сигнала, обусловленная влиянием нагрузки, можно определить по выражению (IV.34). Задаваясь различными значениями а и а, получим значения uн/u0. Соответствующий этому график приведен на рис. IV.7. Как видно, при малых значениях α влияние неравномерности выходного сигнала за счет нагрузки достаточно велико, что должно быть учтено при практических расчетах.
Для определения суммарной погрешности реостатных и потенциометрических устройств следует учитывать случайный характер погрешностей ΔRзн., ΔRн, ΔRл.

|
|
|
|
Считая, что эти погрешности изменяются по закону Гаусса, найдем среднее квадратическое значение суммарной погрешности в виде
 (IV.35)
(IV.35)
Максимальная суммарная ошибка будет
 (IV.36)
(IV.36)
Индуктивные устройства. Действие индуктивных устройств основано на изменении индуктивного сопротивления катушки датчика при перемещении стального якоря. Схема простейшего индуктивного устройства показана на рис. IV.8, а. Входной величиной устройства является воздушный зазор δ, выходной — ток i при заданном напряжении: i = u / z
где  — кажущееся сопротивление катушки ℓ датчика.
— кажущееся сопротивление катушки ℓ датчика.
Индуктивность L катушки может быть вычислена по формуле
 (IV.37)
(IV.37)
где ω— число витков катушки; S — сечение магнитопровода.
Активное сопротивление обмотки намного меньше индуктивного сопротивления, т. е.R<<ωL, поэтому без большой погрешности можно считать, что
 (IV.38)
(IV.38)
 (1V.39)
(1V.39)
тогда чувствительность элемента определяется по формуле
 (IV.40)
(IV.40)
Вид характеристики индуктивного элемента показан на рис. IV.8, б. Линейность характеристики сохраняется только в пределах некоторой зоны и нарушается, когда активное сопротивление становится сравнимым с индуктивным.
Недостатком индуктивных устройств является зависимость их от частоты напряжения и. Индуктивные устройства применяются для частот не выше 5000 Гц, так как при высоких частотах резко растут потери на перемагничивание и индуктивное сопротивление обмотки.
Если два одинаковых индуктивных устройства соединить по дифференциальной схеме, как это показано на рис. IV.9, то получим так называемый дифференциальный индуктивный прибор. Схема такого прибора дана на рис. IV.У, а. Для среднего положения якоря имеем
При отклонении якоря от среднего положения на выходе прибора появляется напряжение ин, которое растет по мере увеличения этого отклонения. Для двух отклонений, одинаковых по величине, но различных по знаку, значения ин отличаются только фазами, которые противоположны.
|

На рис. IV.9, б показана характеристика дифференциального прибора. Чувствительность duн/dbможет быть вычислена по характеристике как тангенс угла между касательной к кривой ин (6) и осью δ.
Преимущества дифференциального индуктивного устройства по сравнению с простыми заключаются в большей чувствительности и значительно меньшей погрешности от колебаний температуры и напряжения питания.
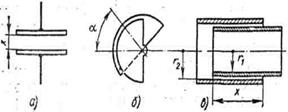
Емкостные устройства. У емкостных устройств входной величиной является линейное или угловое перемещение, а выходной — электрическая емкость. Примеры емкостных устройств приведены на рис. IV. 10. Первое из них (рис. IV. 10, а) относится к плоским конденсаторам. Емкость такого конденсатора определяется по формуле
где ε — диэлектрическая постоянная; S — активная площадь конденсатора; х — расстояние между пластинами. -
При изменении расстояния х между пластинами будет изменяться емкость конденсатора. Чувствительность устройства
 (IV.41)
(IV.41)
На рис. IV. 10, б показан емкостный датчик с угловым перемещением а. Емкость такого конденсатора

где S — активная площадь конденсатора при а = 0; d — расстояние между пластинами.

|
| ||||
Чувствительность устройства
 (IV.42)
(IV.42)
На рис. IV. 10, в показано цилиндрическое емкостное устройство. Емкость такого конденсатора зависит от осевого перемещения внутреннего цилиндра и выражается формулой
где х — величина перекрытия внутреннего цилиндра наружным; r1 — радиус внутреннего цилиндра; г2 — радиус внешнего цилиндра. Чувствительность устройства будет
 (IV.43)
(IV.43)
Необходимо отметить, что использование емкостных устройств на частоте до 50 Гц без большого усиления невозможно, так как они представляют собой большое сопротивление для прохождения тока.
К недостаткам емкостных устройств относятся необходимость усиления выходного сигнала; потребность в напряжении питания высокой частоты; большое влияние паразитных емкостей.
Сельсины. В системах автоматического регулирования довольно часто приходится измерять угловые положения валов (задающего и исполнительного) или углы рассогласования между ними. Для этой цели наибольшее распространение получили индукционные сельсины.
По конструкции сельсины аналогичны электрическим машинам переменного тока. Рассмотрим две различные конструкции сельсинов. Обмотки возбуждения могут находиться либо на статоре (рис. IV. 11, а), либо на роторе (рис. IV. 11,6). Если обмотку возбуждения выполняют однофазной и располагают на статоре, статор выполняют с явно выраженными полюсами. В этом случае на роторе помещаются три обмотки, соединенные в звезду, причем магнитные оси обмоток сдвинуты между собой на 120°. Три конца этих обмоток выводятся на три кольца коллектора.
Если обмотку возбуждения выполняют трехфазной и располагают на статоре (рис. IV. 11, б), то ротор делают явно выраженным и на него укладывают однофазную обмотку. Эту обмотку присоединяют к двум коллекторным кольцам. Сельсины конструкции первого типа имеют большие габаритные размеры, которые получаются за счет увеличения размера статора, но обладают более высокой точностью балансировки ротора. Сельсины с явно выраженным ротором имеют малые габаритные размеры и большой дисбаланс.
Оба типа рассмотренных нами сельсинов можно применять в двух различных режимах работы: силовом (индикаторном) и трансформаторном.
Схема включения сельсинов в двигательном режиме. В этом случае имеются два сельсина: сельсин-датчик СсД и сельсин-приемник СсП, роторы которых включены в общую однофазную цепь переменного тока (рис. IV. 12). Статорные обмотки сельсина-датчика Su S2 и S3 соединены со статорными обмотками сельсина-приемника S1, S2, S3.
При повороте ротора сельсина-датчика на угол, а в цепях его статора создадутся токи, i1, i2 и i3 которые вызовут магнитный поток в обмотке статора сельсина-приемника. Взаимодействие этого потока с магнитным потоком ротора сельсина - приемника вызовет вращающиймомент Мссп, и ротор сельсина-приемника повернется на угол р.
Величина этого момента может быть определена по формуле
 (IV.44)
(IV.44)
где Мmах— максимальный, или опрокидывающий момент сельсина, определяемый его параметрами; α – β = θ угол рассогласования.
Зависимость Мссп от угла рассогласования для сельсинов, работающих в силовом режиме, показана на рис. IV. 13. Кривая 1 соответствует сельсинам с неявно выраженными полюсами, а кривая 2 — сельсинам с явно выраженными полюсами. Из рис. IV. 13 видно, что при малых углах рассогласования
 (IV.45)
(IV.45)
С точки зрения уменьшения ошибки, а следовательно, повышения точности большое значение имеет крутизна характеристик
 (IV.46)
(IV.46)
Из рис. IV. 13 видно, что большей крутизной обладают сельсины с явно выраженными полюсами. При некоторой нагрузке на валу сельсина-приемника МСсПн в системе образуется некоторый угол рассогласования θН, величина которого определяется по формуле
 (IV.47)
(IV.47)
Силовая схема включения сельсина отвечает, принципу обратимости, т. е., поворачивая сельсин-приемник на угол β, получим
 (IV.48)
(IV.48)
|

Если оба сельсина — датчик и приемник одинаковы, то М'ссп = Мссп. Оба эти момента стремятся уравнять углы β и а, и при их равенстве моменты М'ссп и М сспобращаются в нуль. Отсюда следует, что момент вращения сельсинов имеет синхронизирующий характер.
Рассмотрим случай, когда ротор сельсина-датчика равномерно вращается с угловой скоростью ωр1, причем отношение ωр1/ω мало; здесь ω — основная угловая частота питающей сети:
Для вычисления момента МСсп можно пользоваться предыдущей формулой, в которой α и β будут теперь переменными величинами. Для произвольного момента времени имеем:
α = α0 +ωр1 t.
В этом случае для установившегося режима можем написать

откуда
 (IV.49)
(IV.49)
При малых значениях θ можно принимать  .
.
дифференцируя уравнение  , получим
, получим
 (IV.50)
(IV.50)
Величина ωр2 — угловая скорость сельсина-приемника. Полученная формула позволяет сделать вывод, что ротор сельсина-приемника в установившемся режиме вращается с той же скоростью, что и ротор сельсина-датчика. Но отработанный угол приемника меньше соответствующего угла датчика на величину ошибки 9.
Если сельсин-датчик и сельсин-приемник работают с одной угловой скоростью и их заданные и отработанные углы равны, то говорят, что сельсины работают синфазно. Обычно погрешность синфазности в установившемся режиме не превышает угловой ошибки 9. Чтобы уменьшить погрешность синфазности, необходимо уменьшить, по возможности, момент Мссп, т. е. момент трения и других сопротивлений вращению ротора сельсина. При М ссп — 0 имеем θ = 0, и сельсины работают синфазно.
Схема включения сельсинов в трансформаторном режиме. Назначение трансформаторной сельсинной схемы — создавать выходное напряжение, которое по величине и знаку однозначно определяется углом рассогласования между сельсинами. Схема включения сельсинов в трансформаторном режиме изображена на рис. IV. 14.
Сельсин-датчик связан с задающим валом, а сельсин-приемник — с выходным валом. Напряжение на зажимах обмотки ротора сельсина-приемника Е является выходным напряжением схемы.
Допустим, что роторы обоих сельсинов неподвижны и образуют с первой фазой статоров Sal и Sb1 соответственно углы αиβ. Тогда можно показать, что в обмотке ротора сельсина-приемника индуктируется напряжение
 (IV.51)
(IV.51)
При β = π/2 имеем
 (IV. 52)
(IV. 52)
Таким образом, при неподвижном роторе и β = π/2 выходное напряжение сельсина-приемника пропорционально синусу угла поворота ротора сельсина-датчика.


|
| ||||
Закрепим ротор сельсина-приемника на исполнительной оси таким образом, чтобы обмотки фаз ротора при неподвижной оси были смещены относительно соответствующих обмоток статора на угол π/2 в сторону вращения.
При повороте исполнительной оси на угол р обмотка ротора будет смещена относительно обмотки статора Sbl на угол β + π/2
Тогда выходное напряжение будет
 (IV.53)
(IV.53)
т. е. пропорционально синусу угла рассогласования между командной и исполнительной осями.
Если оба сельсина вращаются соответственно со скоростями ωа и ωв, то углы β и α становятся переменными величинами, т. е.  .
.
Формула (IV.53) примет вид
 (IV.54)
(IV.54)
При β0 =α0 получим
 (IV.55)
(IV.55)
В этом случае выходное напряжение Е2 будет иметь частоту модуляции, зависящую от разности угловых скоростей сельсина-датчика и сельсина-приемника. При ωа = ωвзначение Е 2 обращается в нуль. При малых углах рассогласования формулу (IV.55) можно привести к виду
 (IV.56)
(IV.56)
где kt — коэффициент трансформации сельсинной схемы.
Дифференциальный сельсин. Дифференциальный сельсин состоит из трехфазного ротора и трехфазного статора (рис. IV. 15). Обмотки ротора и статора дифференциального сельсина соединены по схеме звезда. При включении дифференциального сельсина в сельсинную схему, как это показано на рис. IV. 16, можно вводить дополнительный угол рассогласования рх на ротор сельсина-приемника.
|

.
Повернем ротор сельсина-датчика на угол а, а ротор дифференциального сельсина ДСс на угол β1 тогда результирующий магнитный потокстатора сельсина-приемника будет повернут на угол α + β1,и выходное напряжение
 (IV.57)
(IV.57)
или
 (IV.58)
(IV.58)
При малых углах поворота
 (IV.59)
(IV.59)
Итак, дифференциальный сельсин увеличивает угол рассогласования системы на угол β1. Изменяя направление вращения ротора дифференциального сельсина, получим
 (IV.60)
(IV.60)
На основании математических зависимостей (IV.59) и (IV.60) можно установить, что дифференциальные сельсины служат для введения дополнительных поправок в сельсинную трансформаторную схему.
Погрешность сельсинов. Точность дистанционной передачи сельсинами угловых перемещений зависит от моментов трения и нагрузки на валу сельсина-приемника, конструкции ротора, а также от качества выполнения сельсинов (в частности, от точности балансировки роторов и идентичности параметров сельсина-датчика и сельсина-приемника). Ошибка сельсинов может иметь положительное Д6+ и отрицательное Д8" значения. Класс точности силовых сельсинов зависит от среднего арифметического значения этих двух ошибок:
 (IV.61)
(IV.61)
Для силовых сельсинов установлены следующие классы точности:
Класс точности сельсина...... I II III IV
Максимально допустимая ошибка,
град........................................................ ±0,75 ±1,5 ± 2,5 ± 5
Точность сельсинов в трансформаторном режиме также зависит от максимально допустимой ошибки сельсинной нары. Для уменьшения величины этой ошибки применяют повышающие механические передачи между сельсинами, обеспечивающие точный СсД2 (СсП 2) и грубый СсД1 {СсП1) отсчеты. На рис. 1V.17, б показана схема включения сельсинов с точным и грубым каналами (см. также схемы рис. 11.13). В этом случае максимально допустимая погрешность будет определяться зависимостью
 (IV.62)
(IV.62)
где i ред— передаточное отношение сельсинного редуктора.
Для устранения ложной синхронизации передаточное число сельсинного редуктора устанавливается нечетным: 1: 23; Л: ЗГ и т. д. При нечетных числах редуктора схема изменений напряжений грубого и точного каналов сельсинов показана на рис. IV. 17, б. Как видно, при угле рассогласования θ = 180° по грубому каналу имеем равенство нулю напряжения сельсинной схемы грубого отсчета. При этом на точном канале Сельсинов напряжение будет достигать uсинхр, вызывающее срабатывание синхронизатора (см. также рис. 11.13). Из формулы (IV.G2) видно, что точность работы сельсинной схемы следящей системы с редуктором, имеющим iред. = 1: 31, составляет несколько угловых минут для сельсинов I и II классов точности.
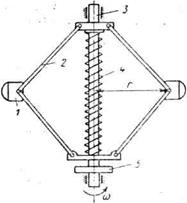
Устройства для замера угловых скоростей. Одними из наиболее распространенных устройств для измерения угловых скоростей вращения являются центробежные тахометры. Схема одного из простейших центробежных тахометров изображена на рис. IV. 18. На вращающейся оси 3 с помощью шарниров и четырех рычагов 2 закреплены две массы. Поджатая пружина 4 надета на ось 3 между двумя ползушками (подвижной нижней и неподвижной верхней). Вращение оси передается через зубчатое колесо 5. При вращении оси с угловой скоростью со массы / симметрично расходятся, перемещая нижнюю ползушку до тех пор, пока сила пружины не уравновесит инерционные силы двух масс.

Составим уравнение движения центробежного тахометра. Вращающиеся массы будут расходиться под действием центробежной силы
 (IV.63)
(IV.63)
где kт — постоянная, зависящая от конструкции тахометра; r— расстояние от оси вращения до центра масс.
С изменением угловой скорости массы тахометра будут раздвигаться, перемещая при этом на величину х нижнюю ползушку. Перемещение масс (радиус r)связано зависимостью с величиной х:
r = r (x) (IV.64)
Подставим зависимость (IV.64) в уравнение (IV.63) и разложим его в ряд Тейлора, пренебрегая членами разложения выше первого; тогда получим
 (IV.65)
(IV.65)
Уравнение перемещения нижней ползушки запишем в виде
 (IV.66)
(IV.66)
где тп — приведенная к. ползушке масса всех подвижных частей тахометра; fc. — сила сопротивления, препятствующая перемещению нижней ползушки, которая зависит от жесткости пружины, силы трения ползушки, т. е.
 (IV.67)
(IV.67)
где kc — коэффициент жесткости пружины; R0 — сила предварительного натяжения пружины; D — коэффициент скоростного трения; G0 — вес грузов.
Подставим выражения (IV.65) и (IV.67) в уравнение (IV.66); тогда
получим
 (IV.68)
(IV.68)
Для установившегося состояния масс тахометра имеем
 (IV.69)
(IV.69)
Используя последнее уравнение из выражения (IV.68), получим
(IV.70)
Как обычно, введем относительные переменные tj = Ах/хт и е = = Д со/со 0, и тогда с помощью уравнения (IV.70) найдем
 (IV.71)
(IV.71)
где

Введя обозначения

получим
 (IV.72)
(IV.72)
Уравнение (IV.72) характеризует изменение перемещения нижней ползушки при изменении угловой скорости вращения оси тахометра в динамике.


Рис. IV.19. Конструктивная схема Рис. IV.20. Схема устройства для измерения
центробежного импеллера угловых ускорений
В качестве устройства для измерения угловых скоростей применяют также гидравлические или пневматические центробежные импеллеры (рис. IV.19). Вал 3 сообщает угловую скорость вращения крыльчатке 1. Крыльчатка расположена в корпусе 2. Рабочая жидкость (или газ), попадая через отверстие 4 в датчик, создает на его выходе давление р, зависящее от плотности жидкости (газа), и угловой скорости:
 (IV.73)
(IV.73)
где v — плотность жидкости (газа); r1, r0 — радиусы крыльчатки импеллера. Уравнение (IV.73) в приращениях можно записать в виде
 (IV.74)
(IV.74)
где

Момент инерции крыльчатки импеллера мал и это позволяет считать его безынерционным, что указывает на справедливость выражения (IV.74).
Устройства замера угловых ускорений. При неравномерном вращении маховика1 (рис. IV.20), от действия углового ускорения w образуется смещение диска 3 с прорезями 4 относительно неподвижного диска 5. За счет этого смещения изменяется освещенность фотоэлементов 6. В результате этого напряжение на выходе фотоэлементов будет пропорционально угловому ускорению, т. е.
ив = kw, (IV.75)
где k — коэффициент пропорциональности.
Пружина 2 возвращает маховик 1 с диском 3 в первоначальное положение.
С помощью этого устройства с точностью до 1 % можно измерять угловые ускорения в различного рода машинах и механизмах.
Дата добавления: 2015-12-17; просмотров: 20; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!