Магнитный усилитель
|
В магнитном усилителе (МУ) для увеличения сигнала используют индуктивное сопротивление. В качестве управляемого индуктивного сопротивления применяют дроссель со стальным сердечником. Индуктивное сопротивление изменяют подмагничиванием.
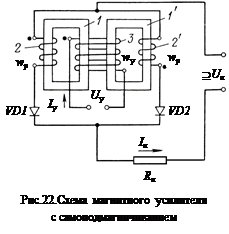
Схема магнитного усилителя с самоподмагничиванием (самонасыщением) (рис.22) имеет высокий коэффициент усиления, быстродействие. Магнитный усилитель с самоподмагничиванием состоит из следующих элементов: 1, 1' – два одинаковых сердечника (из листовой электротехнической стали); 2, 2' – полуобмотки рабочей обмотки, где w р – число витков полуобмотки, полуобмотки включаются параллельно и встречно; VD1, VD2 – диоды, включены последовательно с полуобмотками; R н – сопротивление нагрузки, включено последовательно в цепь переменного тока; 3 – обмотка управления с числом витков w у, питается постоянным напряжением U у.
|



Если управляемых сигналов несколько, то в сердечниках располагается несколько обмоток управления.
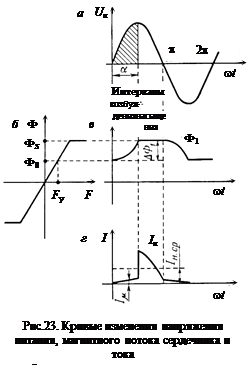
Каждая рабочая полуобмотка 2, 2' проводит ток только в течение одного полупериода питающего переменного напряжения U п (рис.23, а). Рассмотрим протекание процесса только в сердечнике 1 (см. рис.22) в течение первого полупериода (от 0 до p). К началу первого полупериода в сердечнике 1 имеется начальный магнитный поток F0 (рис.23, б). Он создается магнитодвижущей силой F у при протекании по обмотке управления 3 тока I у. Начальный поток определяется по кривой намагничивания сердечника. Процесс намагничивания будет продолжаться до момента насыщения сердечника (Fs).
Время, в течение которого сердечник намагничивается, называется интервалом возбуждения и характеризуется углом насыщения a. В этот интервал в нагрузке протекает небольшой намагничивающий ток I m, поскольку все напряжение питания прикладывается к дросселю из-за его большого индуктивного сопротивления (рис.23, г).
При насыщении сердечника наступает интервал насыщения, который продолжается до конца полупериода. В этом интервале поток сердечника остается неизменным; индуктивность дросселя мала и при этом практически все питающее напряжение U п прикладывается к нагрузке R н. Ток I н в нагрузке резко возрастает (рис.23, г) и протекает в течение всего периода насыщения, т.е. от момента насыщения сердечника, определяемого углом a, до конца полупериода, определяемого углом p.
В течение другого полупериода (от p до 2p) в другом сердечнике 1 ' происходят аналогичные процессы.
Среднее значение тока в нагрузке зависит от длительности протекания тока I н в интервале насыщения. Длительность протекания тока определяется углом насыщения a (см. рис.23, г). Среднее значение тока в нагрузке
 . (12)
. (12)
Из выражения (12) видно, что ток I н.ср определяется напряжением U п, нагрузкой R н, углом насыщения a и временем насыщения. Угол a зависит от степени начального намагничивания F0.
Значение изменения потока ∆F1 в течение интервала возбуждения определяется из выражения
 .
.
Чем больше начальный поток F0, тем меньше ∆F1, тем меньше угол a и больше средний ток нагрузки I н.ср и наоборот. Следовательно, изменяя начальное подмагничивание, можно изменять ток нагрузки I н.
Основные характеристики магнитного усилителя. Рассмотрим следующие характеристики.
|


1. Характеристика управления – это зависимость среднего значения тока нагрузки I н.ср от магнитодвижущей силы F у (рис.24), где м.д.с. определяется формулой
– F у = w у I у.
Для уменьшения тока нагрузки I 01 при отсутствии тока управления I у на сердечниках усилителя предусматривают дополнительную обмотку, которая называется обмоткой смещения и питается от постороннего источника. В обмотке смещения устанавливают необходимую величину м.д.с. F см смещения, которая обеспечивает требуемое значение начального тока I 02.
2. Коэффициент кратности тока нагрузки
ki = I max/ I 0,
где I 0 – ток холостого хода, требуемый для перемагничивания сердечника.
3. Коэффициент усиления – характеризует усилительные свойства МУ; коэффициент усиления по мощности
kР = Р н/ Р у,
где Р н – мощность нагрузки; Р у – мощность управления (т.е. потери в сопротивлении обмотки управления r у от тока управления I у.ном, обеспечивающего номинальный ток нагрузки).
4. Скорость установления выходного напряжения – характеризует быстродействие МУ, которое определяет скорость установления потока F0. Поток F0 изменяется по закону
F0 = F0 уст (1 – е- t/T ),
|
где F0уст – установившееся значение потока, которое практически достигается за 3 Т; Т – постоянная времени.
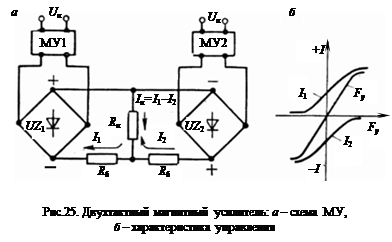
Реверсивный магнитный усилитель. Магнитный усилитель работает на переменном токе. Для обеспечения в нагрузке постоянного по направлению тока в цепи на выходе усилителя включают выпрямитель. Для обеспечения реверсирования тока нагрузки применяют двухтактные магнитные усилители (рис.25).
Балластные сопротивления R б предназначены для предотвращения короткого замыкания в контуре. Этот контур в схеме образован последовательным соединением усилителей.
В этой схеме ток нагрузки является разностью токов I 1 и I 2 обоих магнитных усилителей. Обмотки управления усилителей включены последовательно и встречно. Поэтому при увеличении тока управления в одном направлении ток одного усилителя увеличивается, а другого – падает (рис.25, б). Разность токов в нагрузке при этом возрастает. Увеличение тока управления в другом направлении также приводит к возрастанию тока нагрузки, но уже при другой полярности.
Недостатки двухтактных схем – необходимость наличия двух усилителей и большие потери в балластных сопротивлениях. Коэффициент полезного действия лучших двухтактных усилителей не превышает 45 %.
Дата добавления: 2016-01-04; просмотров: 54; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!