Методы подключения устройств сопряжения
К персональному компьютеру типа IBM PC УС могут быть подключены тремя путями, соответствующими трем типам стандартных внешних интерфейсов, средства которых входят в базовую конфигурацию компьютера [4]:
· через системную магистраль или шину, канал (эти термины равнозначны);
· через параллельный интерфейс Centronics;
· через последовательный интерфейс RS-232C.
Каждый из трех указанных методов подключения имеет свои преимущества и недостатки. Выбор одного из них - важный шаг в самом начале разработки УС. Конечно же, здесь не рассматривается задача подключения к персональному компьютеру внешних устройств, имеющих стандартные интерфейсы Centronics и RS-232C (в этом случае УС представляет собой самый обычный, соответствующим образом распаянный кабель). В таблице 2.1 приведено сравнение трех методов подключения по шести параметрам, которые надо учитывать при выборе метода. Из таблицы видно, что выбор системной магистрали обеспечивает наибольшую скорость обмена. При этом не требуется ни отдельного конструктива (плата УС устанавливается в корпус компьютера), ни дополнительного источника питания (используется тот, который есть в компьютере). В тоже время одноплатное исполнение ограничивает сложность УС, а соседство с быстродействующими и мощными цифровыми узлами компьютера приводит к высокому уровню электромагнитных помех и наводок по цепям питания.
Выбор Centronics или Rs-232C позволяет расположить УС (при чем УС любой сложности) на большом расстоянии от компьютера. Но при этом достигается гораздо меньшая скорость обмена, а также требуется внешний конструктив и дополнительный источник питания, что существенно увеличивает стоимость системы. При разработке УС необходимо в первую очередь сформулировать требования, предъявляемые к нему, проанализировать функции, которые компьютер должен выполнять с помощью данного УС. В общем случае эти функции могут быть реализованы как аппаратурой УС, так и программным обеспечением компьютера. В свою очередь УС может включать в себя: процессор, однокристальный контроллер, микропрограммный автомат или жесткую логику.
|
|
|
Таблица 2.1 - Сравнение методов подключения УС.
| Параметры | Системная магистраль ISA | Интерфейс Centronics | Интерфейс RS-232C |
| Скорость обмена | Высокая (до 5 Мбайт/с) | Средняя (до 100 Кбайт/с) | Низкая |
| Длина и тип линии связи | Встроенные УС (линия связи отсутствует) | До 10 м, многопроводный кабель | До 15 м, одиночный провод |
| Дополнительный конструктив | Не нужен | Нужен | нужен |
| Внешний источник питания | Не нужен | Нужен | нужен |
| Формат данных и их разрядность | Параллельный 8, 16 разрядов | Параллельный 8 разрядов | Последовательный |
| Количество УС, подключаемых к компьютеру | До 6 |
|
|
|
Варианты устройств сопряжения
Функции, выполняемые УС, можно разделить на две группы. К первой группе относятся интерфейсные функции, то есть те, которые обеспечивают обмен с выбранным интерфейсом компьютера (ISA, Centronics, RS-232C или какие-нибудь еще). Вторую группу образуют операционные или основные функции, ради которых и создается УС. В соответствии с этими двумя группами функций, в аппаратной структуре УС можно так же выделить две части: интерфейсную и операционную. При этом подходы в разработке этих двух частей имеют принципиальные отличия. Операционные части разных УС могут быть самыми разнообразными, а интерфейсные части практически не зависят от операционных функций и определяются протоколом выбранного стандартного интерфейса. Пример интерфейсной части для самого распространенного интерфейса ISA приведен на рисунке 2.2.
Одной из основных интерфейсных функций, выполняемых УС, работающими в режиме программного обмена, является селектирование или дешифрация адреса. Эту функцию выполняет узел, называемый селектором адреса, который должен вырабатывать сигналы, соответствующие выставлению на шине адреса магистрали кода адреса, принадлежащему данному УС, или какого либо адреса из пространства адресов данного УС.
|
|
|
Селектор адреса выполнен на ППЗУ КР556РТ4 и дешифраторах КР1533ИД7. При этом свободный адресный вход ППЗУ используется для переключения селектируемых адресов. Входные данные буферируются с помощью КР1533АП5. В адресном пространстве устройств ввода-вывода компьютера наше УС занимает зону в 3 адреса, два из которых используются для чтения-записи, а один - для записи слова состояния. Инвертированный сигнал RESET DRV задает начальную конфигурацию внешних линий (все на прием).
Измерение скоростей течения гидрометрическими вертушками сводится к измерению частоты следования электрических импульсов от вторичного прибора, поэтому в операционной части УС следует реализовать измеритель частоты. В основе подобных схем лежат счетчики, считающие импульсы образцовой и измеряемой частоты. Цифровое измерение частоты в общем случае сводится к подсчету количеств импульсов входного и образцового сигналов. Частоту входного сигнала вычисляют по формуле:
 , (2.1)
, (2.1)
где  - частота опорного тактового генератора,
- частота опорного тактового генератора,
 - количество периодов входного сигнала,
- количество периодов входного сигнала,
|
|
|
 - количество периодов опорного сигнала.
- количество периодов опорного сигнала.
Рисунок 2.1 поясняет принципы определения частоты сигнала.
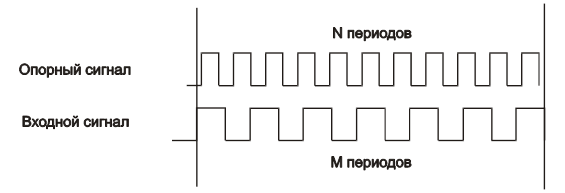
Рисунок 2.1- Определение частоты сигнала при помощи опорного генератора
При этом, так как относительная погрешность измерения обратнопропорциональна N, то, выбирая N или M можно определить аппаратную погрешность измерения. Для получения необходимой точности количество разрядов нашего измерителя следует выбрать равным 16.
Операционная часть включает в себя тактовый, генератор два счетчика (для тактового сигнала и входного сигнала) и схему управления. Функциональная схема УС показана на рисунке 2.3. Работа измерителя частоты начинается с записи числа (65536 - М) в счетчик Сч.1. При этом устанавливается триггер Т1, разрешая запись единицы в триггер Т2, и сбрасывает счетчик Сч.2. После прихода первого входного импульса устанавливается триггер Т2, разрешая работу счетчиков Сч.1. и Сч.2.. Этим обеспечивается привязка процесса измерения к входному сигналу. Отсчитав М входных импульсов, Сч.1. перебрасывает триггер Т3 и сбрасывает Т1 и Т2. Окончание процесса измерения инициализирует сигнал ИЗМ. Возникновение этого сигнала следует отслеживать программно, и после его появления необходимо считать данные из счетчика Сч.2., и затем вычислить частоту входного сигнала. При необходимости цикл измерения повторяется. Интерфейс RS-232C предназначен для передачи данных в последовательном коде, имеет сложный протокол обмена и мало пригоден для решения нашей задачи.
Особый интерес представляет интерфейс Centronics. Основным назначением этого интерфейса (аналог ИРПР-М) является подключение к компьютеру принтеров различных типов. Поэтому распределение контактов разъема, назначение сигналов, программные средства управления интерфейсом ориентированы именно на эти цели. В тоже время с помощью данного интерфейса можно подключать к компьютеру и другие внешние устройства, имеющие разъем Centronics, а также специально разработанные УС. Основным достоинством использования Centronics для подключения УС по сравнению с ISA является значительно меньший риск вывести компьютер из строя. Главный недостаток этого подхода - значительно меньшая скорость обмена. Назначение 36 контактов разъема Centronics приведено в таблице 2.2
Все сигналы интерфейса Centronics можно разделить на четыре группы:
1 - восьмиразрядная шина данных для записи из компьютера (сигналы D0...D7);
2 - четырехразрядная шина управления для записи из компьютера (сигналы -STROBE, -AUTO FD, -INIT, и -SELECT IN);
3 - пятиразрядная шина состояния для чтения в компьютер (сигналы -ASC, BUSY, PE, SLCT и -ERROR);
4 - шина ‘‘ земли ’’ (GND).
Простейший анализ набора сигналов позволяет выделить основную проблему, возникающую при сопряжении с интерфейсом Centronics. Поскольку шина данных является однонаправленной, что позволяет использовать ее только на вывод, для ввода данных необходимо использовать сигналы из пятиразрядной шины состояния. Обработку же сигналов, возможно, производить только на программном уровне.
Таблица 2.2 - Назначение контактов разъемов Centronics
| Контакт разъема Компьютера | Линия (сигнал) | ВВОД/ВЫВОД |
| -STROBE | ВЫВОД | |
| D0 | ВЫВОД | |
| D1 | ВЫВОД | |
| D2 | ВЫВОД | |
| D3 | ВЫВОД | |
| D4 | ВЫВОД | |
| D5 | ВЫВОД | |
| D6 | ВЫВОД | |
| D7 | ВЫВОД | |
| -ASK | ВВОД | |
| BUSY | ВВОД | |
| PE | ВВОД | |
| SLCT | ВВОД | |
| -AUTO FD | ВЫВОД | |
| -ERROR | ВВОД | |
| -INIT | ВЫВОД | |
| -SLCT IN | ВЫВОД | |
| 18....25 | GND | ВЫВОД |
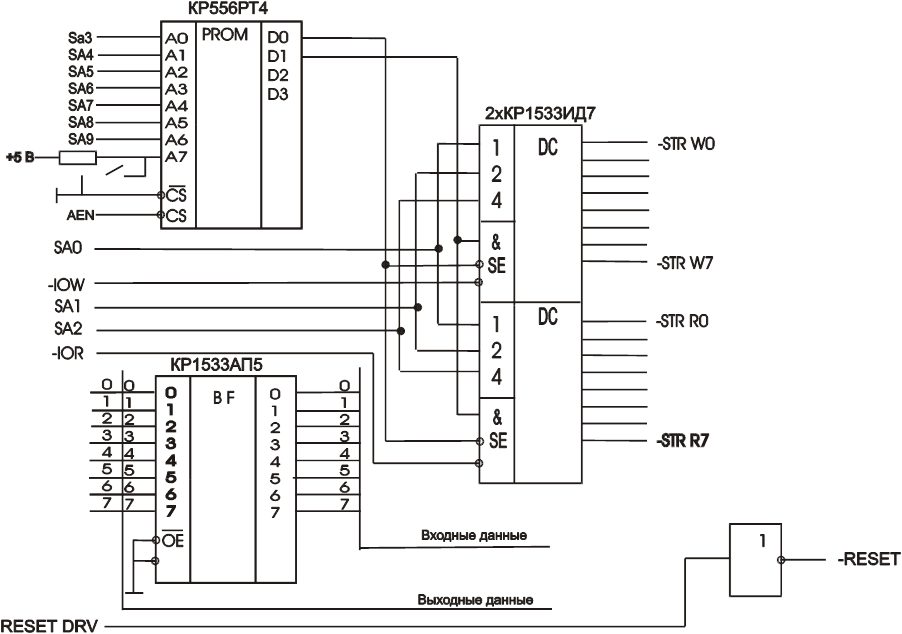
Рисунок 2.2- Интерфейсная часть устройства сопряжения.
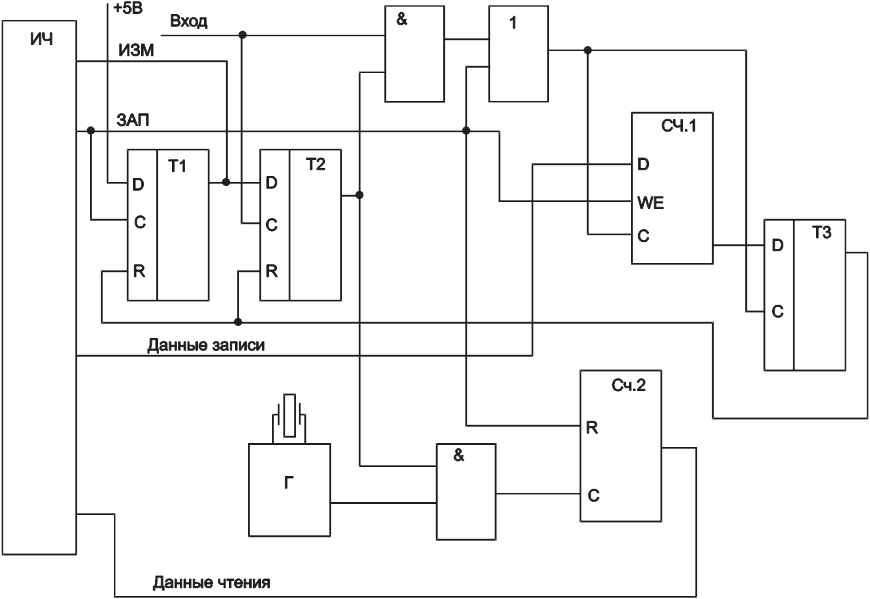
Рисунок 2.3 - Функциональная часть устройства сопряжения.
Дата добавления: 2016-01-04; просмотров: 91; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!