Теорема об условной сходимости градиентного метода с постоянным шагом .
Теорема 1: Пусть в задаче (1) функция f ограничена снизу, непрерывно дифференцируема и, более того, f ′ удовлетворяет условию Липшица :
| ||f ′(x) – f ′(y)|| ≤ Λ ||x – y|| при всех x, y ∈ Rm. |
Тогда при α ∈ (0, 2/Λ) градиентный метод с постоянным шагом условно сходится .
Д о к а з а т е л ь с т в о. Положим zn = –αf ′(xn) и обозначим f(xn + tzn) через φ(t). Тогда, как легко видеть,
| φ′(t) = (f ′(xn + tzn), zn) |
и поэтому по формуле Ньютона — Лейбница для функции φ
| f(xn+1) – f(xn) = f(xn + zn) – f(xn) = φ(1) – φ(0) = |
|
| Добавив и отняв (f ′(xn), zn) = ∫01(f ′(xn), zn) ds и воспользовавшись неравенством (x, y) ≤ ||x|| · ||y||, получим |
|
|
Учитывая условие Липшица для f ′, эту цепочку можно продолжить:
| (8) |
Поскольку 1 – Λα/2 > 0, последовательность {f(xn)} не возрастает и, следовательно, релаксационность {xn} доказана. А так как в силу условий теоремы f еще и ограничена снизу, последовательность {f(xn)} сходится. Поэтому, в частности, f(xn+1) – f(xn) → 0 при n → ∞. Отсюда и из (8) получаем
|
Замечания о сходимости.
|
|
|
Подчеркнем, что теорема 1 не гарантирует сходимости метода, но лишь его условную сходимость, причем, локальную. Например, для функции f(x) = (1 + x2)–1 на R последовательность {xn} градиентного метода с постоянным шагом, начинающаяся с произвольного x0 стремится к ∞.
З а д а ч а 7. Докажите это.
Поскольку в теореме 1 градиент непрерывен, любая предельная точка последовательности {xn} является стационарной. Однако эта точка вовсе не обязана быть точкой минимума, даже локального. Например, рассмотрим для функции f(x) = x2sign x градиентный метод с шагом α ∈ (0, 1/2). Тогда, как легко видеть, если x0 > 0, то xn → 0 при n → ∞. Точка же x = 0 не является локальным минимумом функции f.
Заметим также, что описанный метод не различает точек локального и глобального минимумов. Поэтому для того, чтобы сделать заключение о сходимости xn к точке x* = argmin f(x) приходится налагать дополнительные ограничения, гарантирующие, в частности, существование и единственность решения задачи (1). Один вариант таких ограничений описывается ниже.
Теорема о линейной сходимости градиентного метода с постоянным шагом.
|
|
|
Теорема 2: Пусть выполнены условия теоремы 1. и, кроме того, f дважды непрерывно дифференцируема и сильно выпукла с константой λ. Тогда при α ∈ (0, 2/Λ) градиентный метод с шагом α сходится со скоростью геометрической прогрессии со знаменателем q = max{|1 – αλ|, |1 – αΛ |}:
| ||xn – x*|| ≤ qn||x0 – x*||. |
Д о к а з а т е л ь с т в о. Решение x* = argmin f(x) существует и единственно. Для функции F(x) = f ′(x) воспользуемся аналогом формулы Ньютона — Лейбница
|
Далее, f ′′(x) ≤ Λ при всех x ∈ Rm. Кроме того, по условию f ′′(x) ≥ λ при тех же x. Поэтому, так как
| λ||h||2 ≤ (f ′′[x* + s(xn –x*)]h, h) ≤ Λ ||h||2, |
выполнено неравенство
| (10) |
Интеграл, стоящий в этом неравенстве, определяет линейный (симметричный в силу симметричности f) оператор на Rm, обозначим его Ln. Неравенство (10) означает, что λ ≤ Ln ≤ Λ. В силу (9) градиентный метод (4) записывается в виде
| xn+1 = xn – αLn(xn – x*). |
Спектр σ(I – αLn) оператора I – αLn состоит из чисел вида σi = 1 –αλi, где λi ∈ σ(Ln). В силу (10),
| 1 – αλ ≥ σi ≥ 1 – αΛ, |
и следовательно
|
|
|
| ||I – αLn|| ≤ max{|1 –αλ|, |1 – αΛ |} = q. |
Таким образом,
| ||xn+1 – xn|| ≤ q||xn – x*||. |
Из этого неравенства и задачи 1 вытекает утверждение теоремы.
Об оптимальном выборе шага .
Константа q, фигурирующая в теореме 2. и характеризующая скорость сходимости метода, зависит от шага α. Нетрудно видеть, что величина
| q = q(α) = max{|1 – αλ|, |1 – αΛ |} |
минимальна, если шаг α выбирается из условия |1 – αλ| = |1 – αΛ | (см. рис. 3), т. е. если α = α* = 2/(λ+ Λ). При таком выборе шага оценка сходимости будет наилучшей и будет характеризоваться величиной
|
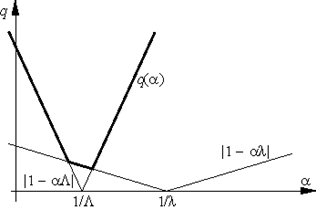
Рис. 3.
В качестве λ и Λ могут выступать равномерные по x оценки сверху и снизу собственных значений оператора f ′′(x). Если λ << Λ, то q* ≈ 1 и метод сходится очень медленно. Геометрически случай λ << Λ соответствует функциям с сильно вытянутыми линиями уровня (см. рис. 4). Простейшим примером такой функции может служить функция на R2, задаваемая формулой
| f(x1, x2) = λx21+ Λ x22 с λ << Λ. |
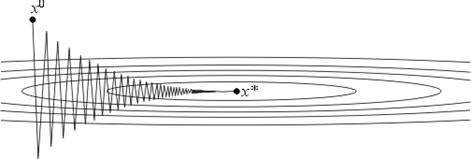
Рис. 4.
Поведение итераций градиентного метода для этой функции изображено на рис. 4 – они, быстро спустившись на "дно оврага", затем медленно "зигзагообразно" приближаются к точке минимума. Число μ = Λ/λ (характеризующее, грубо говоря, разброс собственных значений оператора f ′′(x)) называют числом обусловленности функции f. Если μ >> 1, то функции называют плохо обусловленными или овражными. Для таких функций градиентный метод сходится медленно.
|
|
|
Но даже для хорошо обусловленных функций проблема выбора шага нетривиальна в силу отсутствия априорной информации о минимизируемой функции. Если шаг выбирается малым (чтобы гарантировать сходимость), то метод сходится медленно. Увеличение же шага (с целью ускорения сходимости) может привести к расходимости метода. Опишем два алгоритма автоматического выбора шага, позволяющие частично обойти указанные трудности.
Дата добавления: 2022-06-11; просмотров: 49; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!