Автоматическое управление разомкнутым электроприводом постоянного тока в функции времени
Двигатель параллельного возбуждения 25 кВт, 220 В, 420 об/мин, Iя.н = 120
А, Jя = 6
кг × м2
пускается раз в смену при трёхсменной работе. Статический
момент и момент инерции, приведённые к валу двигателя, равны: Мс = 410 Н × м ,
Jм = 6,5 кг × м2 . Двигатель управляется по схеме, представленной на рис. 14.
Результаты расчёта пусковых характеристик и других параметров:
Rд = 0,1472 Ом; r1 = 0,55 Ом; r2 = 0,22 Ом; r T = 0,8 Ом, Мн = 570 Н × м; ωн = 44 1/с;
СеФн = СмФн = 4,75; Lд = 0,0125 Гн. Расчёт выдержки времени реле 1РУ – 1,35 с; реле 2РУ – 0,54 с.
 L+ L-
L+ L-
Рис. 14. Схема управления двигателем параллельного возбуждения Схема модели автоматического реостатного пуска в функции времени
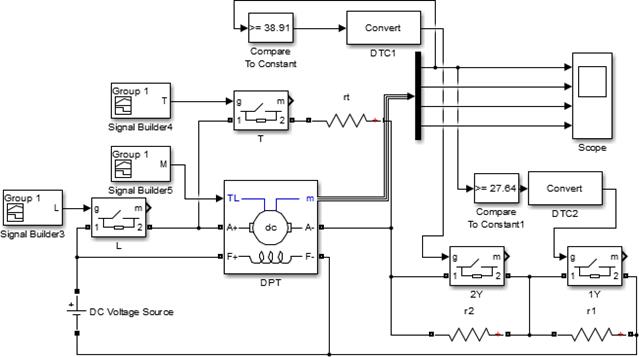
приведена на рис. 15.

Рис. 15. Схема модели привода постоянного тока с автоматическим управлением в функции времени
Так как параметры обмотки возбуждения не приведены, то обмотку возбуждения представляем сопротивлением 220 Ом с питанием от источника 220 В. При токе возбуждения 1 А параметр двигателя Laf равен постоянной СeФн = СмФн, значение которой определено. Блок Signal Builder задаёт реактивный момент сопротивления в 410 Н × м. Интерфейсная шина на четыре выхода позволяет регистрировать частоту вращения ωm, ток обмотки якоря двигателя Ia, ток обмотки возбуждения двигателя If и момент двигателя Te.
|
|
|
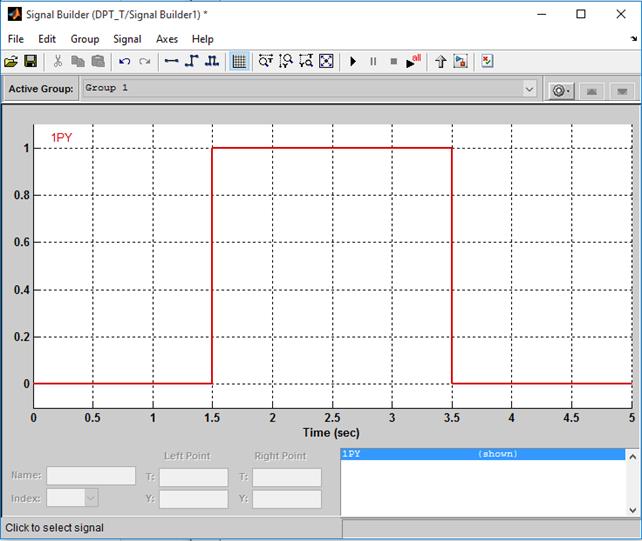
Идеальные ключи (Ideal Switch) моделируют работу контакторов L, T, 2Y и 1Y и управляются блоками Signal Builder, в которые вносится программа состояния ключа в функции времени (рис. 16).
На рис. 16 показано окно настройки блока Signal Builder1 для управления ключом 1Y. В промежутке 0...1,5 с контакт 1Y разомкнут (0,15 с – время срабатывания контактора Л и плюс время выдержки реле 1PY – 1,35 с). В промежутке 1,5...3,5 с контакт 1Y замкнут, при времени более 3,5 с контакт разомкнут. Схема модели обеспечивает автоматический пуск в функции
 |
времени, также предусматривается динамическое торможение при выключении привода.
Рис. 16. Программа управления ключом 1Y
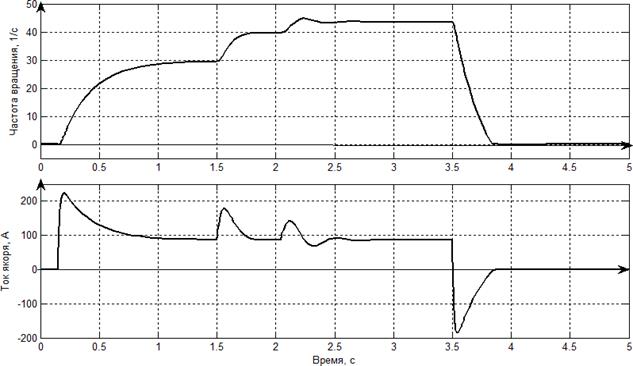
На временной диаграмме (рис. 17) показан процесс пуска двигателя при пренебрежении индуктивностью обмотки якоря.
На рис. 18 показаны механические динамические характеристики, построенные по результату пуска двигателя с помощью графопостроителя XY Graph.
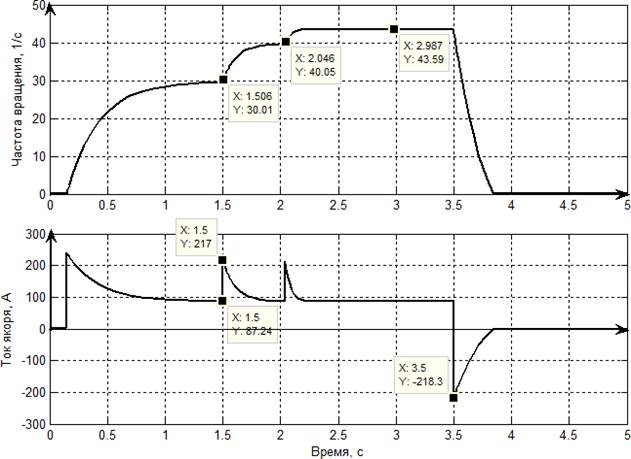
Рис. 17. Реостатный пуск в функции времени и динамическое торможение
(L я.д = 0)
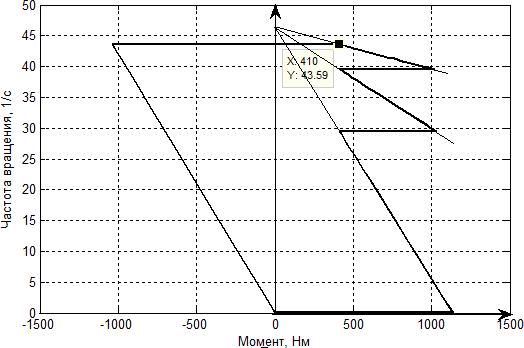 |
Рис. 18. Пусковая диаграмма (механические характеристики)
 |
На рис. 19 и 20 представлены результаты моделирования пуска и торможения при учёте индуктивности обмотки якоря двигателя.
|
|
|
Рис. 19. Реостатный пуск в функции времени и динамическое торможение (Lя.д = 0,0125 Гн)
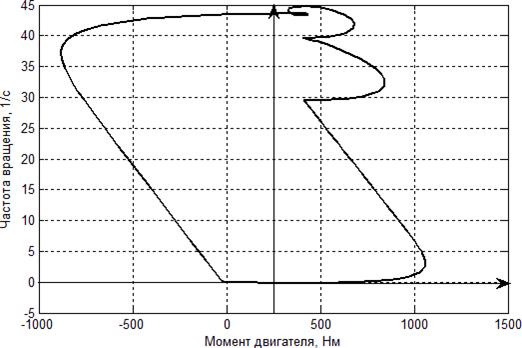 |
Рис. 20. Пусковая диаграмма (механические динамические характеристики при
Lя.д = 0,0125 Гн)
Автоматическое управление разомкнутым электроприводом постоянного тока в функции скорости
На рис. 21 представлена модель реостатного пуска в функции скорости.
 За основу принята схема привода, показанная на рис. 15, и те же параметры.
За основу принята схема привода, показанная на рис. 15, и те же параметры.
Рис. 21. Схема модели автоматического пуска в функции скорости Контактор 1Y включается при достижении частоты вращения 27,64 1/с, а
контактор 2Y – при частоте вращения 38,91 1/с. Временные диаграммы пуска совпадают с приведёнными на рис. 17 и 19.
Дата добавления: 2022-06-11; просмотров: 26; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!