Модель электропривода постоянного тока
РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к курсовому проекту для студентов направления
13.03.02 «Электроэнергетика и электротехника» профиля подготовки
«Электропривод и автоматика» очной и очно-заочной форм обучения
В.Н. МЕЩЕРЯКОВ, П.Н. ЛЕВИН
Липецк
Липецкий государственный технический университет 2015
1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электропривода
РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к курсовому проекту для студентов направления
13.03.02 «Электроэнергетика и электротехника» профиля подготовки
«Электропривод и автоматика» очной и очно-заочной форм обучения
В.Н. МЕЩЕРЯКОВ, П.Н. ЛЕВИН
Липецк
Липецкий государственный технический университет 2015
УДК 621.316.71
М 565
Рецензент - Ю.И. Кудинов, проф., д-р техн. наук
Мещеряков, В.Н.
М 565 Регулируемый электропривод [Текст]: методические указания к курсовому проекту для студентов направления 13.03.02
«Электроэнергетика и электротехника» профиля подготовки
«Электропривод и автоматика» очной и очно-заочной форм обучения
/ В.Н. Мещеряков, П.Н. Левин. – Липецк: Изд-во Липецкого государственного технического университета, 2015. – 33 с.
|
|
|
Методические указания содержат примеры составления моделей электропривода постоянного тока с релейным управлением пуска и торможения, выполненные в программном пакете Matlab Simulink; результаты моделирования, а также примеры краткого анализа полученных результатов. Особое внимание уделено моделированию с использованием пакета расширения SimPowerSystems.
Ил. 24. Библиогр.: 3 назв.
© ФГБОУ ВПО «Липецкий государственный технический университет», 2015
© Мещеряков В.Н., Левин П.Н., 2015
СОДЕРЖАНИЕ
1. Назначение и особенности пакета SimPowerSystem..................................... 4
2. Модель электропривода постоянного тока.................................................... 7
3. Исследования модели двигателя в Simulink................................................................. 9
4. Автоматическое управление разомкнутым электроприводом постоянного тока в функции времени............................................................................................... 24
5. Автоматическое управление разомкнутым электроприводом постоянного тока в функции скорости.............................................................................................. 28
6. Автоматическое управление разомкнутым электроприводом постоянного
тока в функции тока.......................................................................................... 29
|
|
|
Назначение и особенности пакета SimPowerSystem
Компьютерные технологии прочно закрепились в высшей школе и широко используются не только для оформления текстовой и графической частей учебных работ, но и для изучения и исследования сложных систем и процессов. Система MATLAB представляет собой язык программирования высокого уровня, предназначенный для инженерных и научных вычислений и создания средств моделирования различных устройств и систем. В MATLAB реализован модульный принцип построения с широкими возможностями модификации и расширения. Для удобства пользования вся система MATLAB поделена на разделы, оформленные в виде пакетов программ, наиболее общие из которых образовали ядро. Другие пакеты объединены или существуют индивидуально в
виде так называемых Toolboxes.
Для исследователя Simulink создает массу возможностей, начиная от функционального представления устройства и вплоть до генерирования кодов, используемых для программирования микропроцессоров. Пакет Simulink вместе с пакетом расширения SimPowerSystems являются основой для изучения и исследования устройств силовой электроники и электромеханических устройств. Система MATLAB объединена с пакетами Simulink и SimPowerSystems. Библиотека Simulink содержит блоки, в основном ориентированные на моделирование конкретных устройств в виде функциональных схем. В нее входят источники сигналов; масштабирующие, линейные и нелинейные блоки; квантователи, интеграторы, дифференциаторы, измерители и т.д. В библиотеку SimPowerSystems входит набор блоков для имитационного моделирования электротехнических устройств в виде пассивных и активных электротехнических элементов, источников энергии, электродвигателей, трансформаторов, полупроводниковых элементов. С помощью Simulink и SimPowerSystems можно имитировать работу устройств во временной области, а также выполнять анализ их свойств — рассчитывать импеданс цепи, получать амплитудно- и фазочастотные характеристики, выполнять гармонический анализ токов и напряжений.
|
|
|
Несомненное достоинство Simulink и SimPowerSystems состоит в возможности построения моделей сложных электротехнических систем на основе методов имитационного и функционального моделирования. Так, для построения силовой части полупроводникового преобразователя используются блоки SimPowerSystems, имитирующие элементы и устройства, а в его системе управления - функциональные блоки Simulink, которые отражают алгоритм ее работы без представления электрической схемы. Благодаря такому подходу упрощается модель, экономится память, повышается скорость расчета и работоспособность ПК. Важно отметить, что после построения функциональной модели исключается сложный этап составления и решения алгебраических и дифференциальных уравнений и обеспечивается возможность визуального контроля поведения созданной модели и протекающих в ней процессов.
|
|
|
Для создания модели Simulink необходимо открыть окно модели и окно библиотеки и путем перетаскивания («drag-and-drop» — «перетащи и оставь») составить модель из блоков с выполнением соединений между ними. В то же время в создании SimPowerSystems-моделей имеется своя специфика.
1. Входы и выходы SimPowerSystems — блоков критичны к направлению тока, а соединительные линии между блоками являются аналогами электрических проводов, по которым ток протекает в определенном направлении (по стрелкам).
2. При подключении к соединительным линиям можно использовать правую кнопку мыши (ПКМ), но при условии учета направления протекания тока. Если соединение из-за указанных направлений невозможно (стрелки направлены навстречу), то для выполнения соединения необходимо применять специальные блоки — соединители, находящиеся в разделе Connectors библиотеки SimPowerSystems.
3. Непосредственное соединение друг с другом блоков из библиотеки Simulink и блоков из библиотеки SimPowerSystems недопустимо. Передавать сигнал от S-блока к SPS-блоку можно через управляемые источники тока или напряжения, а в обратную сторону — через измерители тока или напряжения.
4. В виртуальных моделях обязательно задаются начальные условия либо с помощью специального блока Powergui, либо с помощью функции powerinit.
5. При анализе виртуальных моделей совместно с функциональными моделями целесообразно использовать следующие решатели дифференциальных уравнений:
- ode15s - неявный многошаговый разностный метод переменного порядка (от 1 до 5) для жестких систем;
- ode23s - модифицированный метод Розенброка с постоянным шагом и фиксированным порядком точности, предназначенный для интегрирования умеренно жестких систем при низких требованиях к точности, но имеющий обычно бóльшую скорость, чем ode15s;
- ode23t - метод трапеций с разностными уравнениями для умеренно жестких систем, обладающий повышенной скоростью интегрирования;
- ode23tb - модифицированный метод трапеций в начале решения и метод,
использующий обратное дифференцирование на последующих этапах; имеет более низкую точность при меньшей скорости интегрирования, чем ode23t.
Выбор решателя осуществляется по результатам сравнения эффективности работы указанных выше решателей в процессе моделирования после запуска конкретной модели с учетом удовлетворительной скорости решения и получаемой картины процессов (отсутствие необъяснимых выбросов или разрывов на временных диаграммах). Как правило, устанавливаемый по умолчанию решатель ode45 использовать для анализа SimPowerSystems - моделей нежелательно по причине его недопустимо медленной работы — эта рекомендация дается самим пакетом при запуске модели.
Библиотека SimPowerSystems имеет следующие основные разделы:
1. Connectors — соединители.
2. Electrical Sources — источники электрической энергии.
3. Elements — электротехнические элементы.
4. Extra Library — дополнительные электротехнические устройства.
5. Machines — электрические машины.
6. Measurements — измерительные и контрольные устройства.
7. Power Electronics — устройства силовой электроники.
Кроме того, в этом окне имеется блок Powergui для проведения анализа свойств исследуемой модели. На основе блоков из перечисленных разделов имеется возможность создавать виртуальные модели довольно сложных устройств силовой электроники.
Модель электропривода постоянного тока
Электропривод (рис. 1) представляет электромеханический комплекс [2], состоящий из электрического двигателя (ЭД), связанного посредством механической передачи (редуктора Р) с рабочей машиной (РМ), силового преобразователя (СП), системы управления (СУ), блока датчиков (БД), которые обеспечивают обратную связь по основным параметрам электропривода, вторичных источников питания (ВИП), обеспечивающих напряжение питания СУ, БД и входных цепей СП, и источника электрической энергии (ИЭЭ).
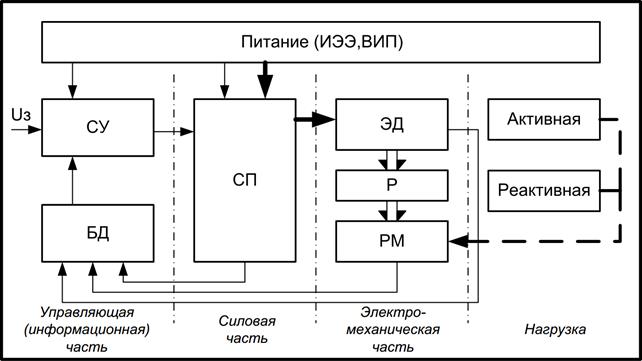
Рис. 1. Блок-схема электропривода
В качестве СП в настоящее время применяются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических параметров источника электрической энергии (напряжение, частота) с электрическими параметрами электрического двигателя и, во-вторых, регулирование электрических параметров машины. Известно, что для управления скоростью вращения и моментом двигателя необходимо регулировать электрические параметры на его входе. Система управления (СУ) предназначена для управления СП, она обычно строится на микросхемах либо микропроцессоре. На вход СУ подается сигнал задания UЗ и сигналы отрицательных обратных связей от БД. Система управления, в соответствии с заложенным в неё алгоритмом, вырабатывает сигналы управления СП.
Существенное влияние на режим работы электропривода оказывает нагрузка. Нагрузочные моменты сопротивления, создаваемые рабочей машиной, можно разделить на две группы: активные и реактивные. Знак активного момента не зависит от знака частоты вращения двигателя (направления вращения), и момент способен производить работу. Для активного нагрузочного момента существует понятие знака момента. На рис. 2, а показан пример положительного активного момента.
Реактивный нагрузочный момент работу не может производить. Он создается как момент сопротивления, автоматически прикладываемый навстречу направлению вращения. Аналитическая трактовка этой автоматической зависимости имеет вид
M Н Р = M Н sign (wрм ),
где
M НР
– реактивный момент сопротивления; M Н
– момент нагрузки;
wрм –
частота вращения рабочей машины. Уместно отметить, что понятие знака
момента нагрузки в этом случае отсутствует,
M Н всегда положителен.
На рис. 2 показаны зависимости активного и реактивного моментов сопротивления от скорости рабочей машины.
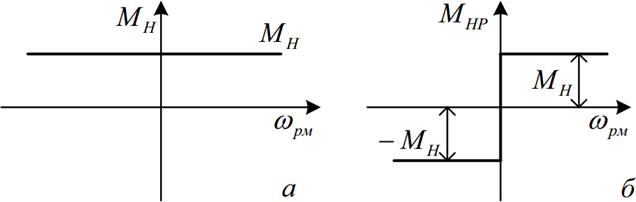
Рис. 2. Зависимость нагрузочного момента:
a - активный характер нагрузки; б - реактивная нагрузка
Дата добавления: 2022-06-11; просмотров: 110; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!