Автоматические системы стабилизации частоты
Принципы регулирования. Конструкция регуляторов
Частота вращения приводного двигателя зависит от нагрузки. Нагрузка – величина случайная, а к частоте предъявляются жесткие требования, поэтому процесс регулирования частоты необходимо автоматизировать.
Регулирование частоты
Частота переменного тока электроэнергетической системы зависит от частоты вращения первичных двигателей синхронных генераторов. Снижение частоты приводит к уменьшению частоты вращения электродвигателей насосов, вентиляторов, что вызывает значительное понижение их производительности и уменьшению КПД электродвигателей.
Повышение частоты приводит к увеличению потерь в агрегатах и ускоренному износу деталей. Возрастает перегрев электродвигателей, увеличивается потребляемая мощность.
Таким образом, поддержание постоянства частоты в электроэнергетической системе – основное условие нормальной работы потребителей электроэнергии.
Механизмы регулирования частоты вращения у тепловых двигателей различны. В дизеле процесс регулирования заключается в подаче определенной дозы топлива и распыливания его топливным насосом высокого давления (ТНВД). Регулирование осуществляется посредством воздействия на ТНВД топливной рейки.
В настоящее время применяют регуляторы частоты вращения следующих типов:
- по отклонению: частоты вращения, частоты вращения и частоты сети;
|
|
|
- комбинированные: двухимпульсные – по отклонению и возмущению (активная составляющая тока нагрузки); многоимпульсные – по отклонению, возмущению и их производным.
Регуляторы частоты вращения по отклонению. Наибольшее распространение получили механические центробежные регуляторы. Они бывают прямого действия и непрямого действия.
В регуляторах прямого действия сигнал от измерительного элемента через кинематическую рычажную передачу подается на исполнительный орган.
В регуляторах непрямого действия сигнал от измерительного элемента сначала усиливается усилителем, а затем подается на исполнительный орган. Усилители бывают гидравлические, пневматические, электрические и комбинированные
Регуляторы прямого действия устанавливаются на дизелях малой мощности (до 100 кВт). На дизелях средней и большой мощности применяются регуляторы непрямого действия.
Простейший центробежный регулятор изображен на рисунке 2.2.1.

Рисунок 2.2.1 – Центробежный регулятор прямого действия.
1 – грузы; 2 – пружины; 3 - муфта
Принцип действия регулятора: при увеличении частоты вращения вала wвх возрастает величина центробежной силы, и закрепленные на валу грузы 1 расходятся, поворачиваются на своих осях и, воздействуя на муфту 3, перемещают ее вверх, сжимая при этом пружину 2.
|
|
|
В регуляторах непрямого действия для усиления действия измерительного элемента используется серводвигатель. В большинстве систем применяют гидравлические серводвигатели.
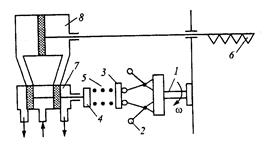
Рисунок 2.2.2 – Конструктивная схема астатического регулятора частоты вращения непрямого действия
1 –приводной вал;2 – грузы; 3 – муфта сцепления; 4 – опора задающего устройства; 5 – пружина; 6 – рейка топливного насоса; 7 – управляющий золотник; 8 - серводвигатель
На рисунке 2.2.2 представлена схема астатического регулятора частоты вращения непрямого действия. Из схемы видно, что при неизменной настройке регулятора (положение элемента 4) устойчивое состояние наступает только при одном и том же значении частоты вращения w – перекрываются каналы золотника 7.

Рисунок 2.2.3 – Конструктивная схема статического регулятора частоты вращения непрямого действия
1 –приводной вал;2 – грузы; 3 – муфта сцепления; 4 – опора задающего устройства; 5 – пружина; 6 – рейка топливного насоса;7 – жесткая кинематическая связь; 8 – управляющий золотник; 9 - серводвигатель
На рисунке 2.2.3 представлена схема статического регулятора частоты вращения с жесткой обратной связью.
|
|
|
Принцип действия. При изменении частоты вращения происходит перемещение штока золотника, который открывает доступ жидкости, находящейся под давлением, в серводвигатель. Движение поршня серводвигателя происходит в сторону, обеспечивающую такую подачу топлива, которая позволяет компенсировать отклонение частоты вращения. Одновременно жесткая обратная связь 7 воздействует на золотник. В результате равновесие наступит уже при другом значении частоты вращения. Т.Е. регулятор обеспечивает статическую характеристику.
Для улучшения динамических характеристик системы в канал обратной связи вводят дифференцирующее звено, которое изменяет характер связи, делая ее гибкой. Гибкую обратную связь называют изодромной.
Центробежные регуляторы частоты вращения поддерживают частоту с точностью ±2,5% в статических режимах и ±(5…6)% в переходных. Время переходного процесса составляет около 5 с при набросе и сбросе 100% нагрузки. В большинстве случаев такие показатели качества не удовлетворяют требованиям. К недостаткам таких регуляторов можно отнести существенную зависимость их характеристик от таких факторов как трение, вязкость масла и т.д. Различия характеристик даже у однотипных регуляторов усложняют параллельную работу генераторных агрегатов. Поэтому в настоящее время основное место в регулировании частоты занимают двухимпульсные и трехимпульсные электромеханические и электрические регуляторы частоты вращения, построенных на различных принципах.
Дата добавления: 2022-01-22; просмотров: 20; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!