Разработка и построение функциональной схемы.

Рисунок 4.1 - Функциональная схема системы управления
ОР - объект регулирования (водобашня);
УИ - устройства измерения (датчик уровня воды);
УВ - устройство воздействия (насос + ПЗА).
Сигнал управления насосом формируется с помощью обратной связи по изменению уровня воды в водобашне от заданного уровня.
ЗО - задающий орган;
УС - устройство сравнения;
УПУ-1 - усилительно-преобразующее устройство реализующее пропорционально-интегральный закон регулирования.
Задающий орган формирует сигнал, соответствующий требуемому значению уровня воды в водобашне. Устройство измерения формирует сигнал, соответствующий реальному уровню воды в водобашне. Разность этих сигналов, получаемая с помощью устройства сравнения, поступает на вход усилительно-преобразующего устройства, формирующего сигнал управления погружным насосом. В данной системе используется принцип управления по отклонению управляемой величины от заданного значения; система регулирования замкнутая.
 Совершенствование системы управления.Используя принцип управления по отклонению, можно уменьшить указанные отклонения управляемой величины, то есть улучшить качество стабилизации уровня воды в водобашне. Пунктиром внесем соответствующие дополнения в функциональную схему: с помощью второго устройства измерения (УИ-2) будем контролировать давление в подводящем трубопроводе водобашни, а сигналы, пропорциональные его изменению, будем передавать на вход УС с помощью специального усилительно-преобразующего устройства (УПУ-2). В результате колебания уровня воды в водобашне будут скомпенсированы.
Совершенствование системы управления.Используя принцип управления по отклонению, можно уменьшить указанные отклонения управляемой величины, то есть улучшить качество стабилизации уровня воды в водобашне. Пунктиром внесем соответствующие дополнения в функциональную схему: с помощью второго устройства измерения (УИ-2) будем контролировать давление в подводящем трубопроводе водобашни, а сигналы, пропорциональные его изменению, будем передавать на вход УС с помощью специального усилительно-преобразующего устройства (УПУ-2). В результате колебания уровня воды в водобашне будут скомпенсированы.
Расчет устойчивости системы.
 Пусть передаточные функции звеньев (см. рисунок 4.1) имеют вид:
Пусть передаточные функции звеньев (см. рисунок 4.1) имеют вид:
1. 
2. 
3. 
Передаточная функция местной обратной связи:
4.  .
.
Изобразим схему САР, состоящую из динамических звеньев.
Зная передаточные функции отдельных звеньев, несложно получить общую передаточную функцию разомкнутой САР: Wраз(р), а затем получить и передаточную функцию замкнутой САР: Wзам(р)
Здесь в знаменателе знак (+) соответствует отрицательной обратной связи, а знак (-) соответствует положительной обратной связи.
Найдем общую передаточную функцию разомкнутой САР, для чего имеющуюся замкнутую автоматическую систему разомкнем в точке Q.
В этой задаче местная обратная связь отрицательная Wос(р)=1 и передаточная функция второго звена с обратной связью определяется уравнением:
В случае положительной обратной связи в знаменателе между слагаемыми останется знак «минус».
 Общая передаточная функция разомкнутой системы, состоящей из последовательно соединенных звеньев, будет равна:
Общая передаточная функция разомкнутой системы, состоящей из последовательно соединенных звеньев, будет равна:

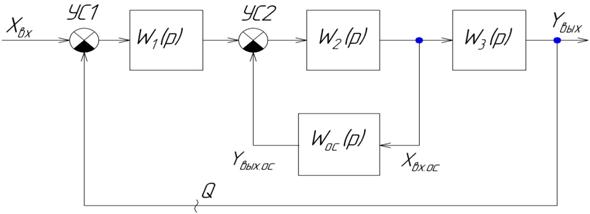
Рисунок 4.2 - Схема САР в виде соединения динамических звеньев
Дата добавления: 2018-02-15; просмотров: 380; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!