Компенсационная система стабилизации и автоматического управления
является наиболее совершенной. Ее можно применять во всех случаях, когда стабилизируемый параметр поддается управлению.
127
Рисунок 12.4
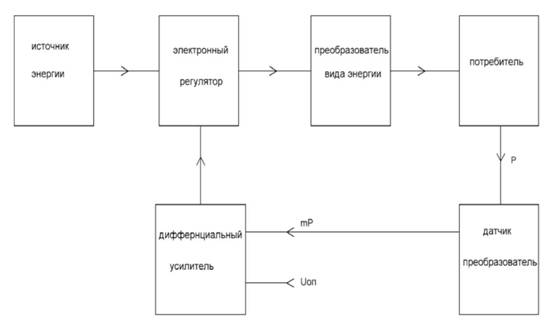
Напряжение или ток постоянные и переменные, напряженность магнитного поля, температура, уровень акустического давления, интенсивность светового или рентгеновского излучения, скорость вращения электродвигателя или скорость поступательного движения – это далеко неполный список того, что можно стабилизировать или чем можно управлять. Любые компенсационные системы стабилизации или автоматического управления строятся с использованием одной и той же блок схемы. Типичный вариант такой схемы показан на рисунке 12.4.
В состав блок-схемы входит источник энергии. Это может быть электрическая сеть, трансформатор, различные источники питания. Далее следует электронный регулятор отбора энергии. Отбираемый ток может регулироваться транзистором непосредственно, с использованием широтно-импульсной модуляции, тиристорным или симисторным регулятором. В доброе старое время часто использовались для этой цели магнитные усилители. После электронного регулятора может стоять преобразователь вида энергии. Например, нагреватель сушильного шкафа или муфельной печи, электродвигатель, катушка электромагнита, источник света или рентгеновского
128
излучения и т.п. В результате получается желаемый стабилизируемый параметр Р .. Для его стабилизации или автоматического управления сначала используется преобразование этого параметра в напряжение, пропорциональное этому параметру, с помощью соответствующего датчика преобразователя.Например,напряженность магнитного поля преобразуется вэлектрический сигнал датчиком Холла, температура с помощью термопары или терморезистора. Полученный сигнал mP подается на один вход дифференциального, чаще всего операционного, усилителя. На другой его вход подается опорное напряжение Uоп. Усиленная разность напряжений управляет действием электронного регулятора так, чтобы при превышении заданного уровня выходного параметра регулятор его уменьшал, а при уменьшении увеличивал. Поэтому эта система и называется компенсационной. В результате устанавливается равновесие, при котором mP=Uоп. Это соотношение определяет величину получаемого параметра P=Uоп/m. При постоянстве Uоп и m получаем систему компенсационного cтабилизатора. Если менять по соответствующему закону Uоп или m получаем систему автоматического управления. Блок схема рисунка 12.4 включает в себя наиболее необходимые элементы. Реальная схема, в зависимости от решаемой задачи, может быть проще или сложнее. Неизменным является наличие кольца обратной связи, позволяющее использовать метод автоматической компенсации. Вместе с тем кольцо обратной связи приводит к тому, что эта схема становиться похожей на усилитель с отрицательной обратной связью. В усилителе с отрицательной обратной связью по кольцу двигаются электрические сигналы, здесь же в качестве сигнала на отдельных участках могут выступать иные сигналы, например, температура, скорость вращения, напряженность магнитного поля и т.п. Тем не менее, рассматриваемая система перенимает от усилителя с отрицательной обратной связи некоторые ее недостатки. Главный из них – возможность неустойчивой работы. Стабильность выходного параметра зависит от коэффициента усиления дифференциального усилителя. Однако, с
|
|
|
|
|
|
129
повышением его коэффициента усиления можно зайти в область неустойчивой работы, когда выходной параметр вместо того, чтобы оставаться неизменным в системе стабилизации, начинает произвольно изменяться, периодически становясь то больше, то меньше желаемого уровня. Анализ устойчивости работы компенсационной схемы сводится решению системы дифференциальных уравнений, описывающих прохождение сигнала по кольцу обратной связи. Поскольку подобные устройства часто используются в промышленных технологических процессах, анализу подобных устройств уделяется большое внимание Существует ряд объемистых монографий, посвященных подобному анализу. Нет возможности здесь заниматься рассмотрением решения подобных задач. Можно лишь дать некоторые общие рекомендации. Прежде всего, необходимо по кольцу обратной связи подсчитать количество инерционных элементов, то есть элементов в которых происходит запаздывание реакции на изменение входного сигнала. Например, скорость вращения электродвигателя запаздывает при изменении тока через него, температуре не может мгновенно измениться, и так далее. Если по кольцу обратной связи имеется только один инерционный элемент, то система оказывается абсолютно устойчиво. При наличии двух инерционных элементов система относительно устойчива, Может быть устойчивый режим, а может быть и не устойчивый. Все зависит от конкретных условий. Система с тремя инерционными элементами, как правило, неустойчива. Под термином неустойчивости мы понимаем возможность неустойчивой работы. Скажем в системе с тремя инерционными элементами возможен режим устойчивой работы, но при этом может оказаться, что стабилизация нужного параметра будет совсем плохой, а попытка улучшить стабилизацию переведет систему в неустойчивый режим. Вместе с тем во многих случаях нужно все-таки обеспечить хотя бы некоторыми специальными методами повышение устойчивости системы. Для этого в состав кольца обратной связи вводят специальную схему, влияющую на прохождение сигнала. Простейший способ
|
|
|
|
|
|
130
заключается во ведении в состав кольца еще одного инерционного элемента с постоянной времени намного большей, чем постоянные времени всех остальных элементов. Тогда можно считать, что поведение системы определяется наличием одного инерционного элемента и система будет устойчива. Этот способ обладает тем недостатком, что при резком изменении дестабилизирующего параметра выходной параметр не может так же быстро измениться и будут наблюдаться кратковременные выходы из режима стабилизации. На рисунке 12.5 показано, что может произойти при резком изменении входного напряжения с выходным параметром.
Для того, чтобы уменьшить реакцию на резкое изменение входного параметра, в схему наряду с интегрирующей цепочкой вводят еще и дифференцирующую. Подбором постоянных времени дифференцирующей и интегрирующей цепи удается добиться значительно лучших результатов.

Рисунок 12.5
Рассмотрим простейшую систему стабилизации температуры, называемую термостатом. То, что здесь будет рассмотрено может быть использовано для термостатирования небольших объектов с поддержанием температуры выше максимальной комнатной.
131

Рисунок 12.6
В схеме рисунка 12.6 источником опорного напряжения является делитель напряжения питания. Необходимо, чтобы оно было хорошо стабилизировано. Датчиком температуры является полупроводниковое термосопротивление, уменьшающее свою величину с ростом температуры. Допустим температура будет поддерживаться постоянной на уровне 50оС. При повышении температуры напряжение на не инвертирующем входе операционного усилителя понижается и понижается напряжение на затворе полевого транзистора, что приведет уменьшению тока через него и уменьшению температуры нагревателя, стоящего в цепи стока полевого транзистора. Анализ схемы стабилизации температуры показывает, что эта схема имеет потенциальную возможность поддерживать температуру постоянной с точностью 0,001оС. На самом деле получить результат лучше 0,1овесьма проблематично. Целый ряд причин приводит к этому. Во первых, эта система термостатирования в принципе стремиться поддерживать постоянной температуру именно терморезистора, а что творится в объеме термостата это другой вопрос. Возможно в термостатируемом объекте в процессе его работы выделяется тепло. И количество тепла может как то меняться. Из за неравномерности температуры стенок термостата в объеме его могут возникать конвекционные потоки и градиенты температуры. Таким образом, результат в значительной мере зависит от конструкции термокамеры. Обычно стараются выполнить термокамеру в виде толстостенного алюминиевого цилиндра с
132
крышками. Проволочный нагреватель равномерно наматывается на цилиндр. Все это помещается в слой термоизоляции для увеличения тепловой инерции термокамеры и снижения потребляемой мощности. Из-за большой инерционности в передаче температуры и большого коэффициента усиления операционного усилителя, термостат обычно работает в прерывистом режиме. Нагреватель то включается на полную мощность, то выключается. В таком ключевом режиме в полевом транзисторе почти не выделяется тепло. Тем не менее из-за большой тепловой инерции температура колеблется мало. Как уже говорилось, колебания температуры термсопротивления будут порядка 0,001оС, а колебания температуры термостатируемого объекта могут быть намного больше. Описываемый термостат может иметь объем камеры до 1 литра. Если нужно иметь намного большую мощность для нагревателя, то обычно используют для регулировки тока через нагреватель тиристор или симистор, включенные в цепь переменного тока последовательно с нагревательным элементом. В этом случае можно регулировать мощность до многих киловатт и даже десятков киловатт.
Дата добавления: 2018-02-18; просмотров: 795; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!