Как можно определить время пуска электропривода
tп=Jωc/Mп.ср-Mc
ωc- скорость привода, соответствующая моменту статической нагрузки Мc
Как определяется диапазон регулирования
Диапазон регулирования – это отношение возможных установившихся скоростей D=ωmax/ωmin.На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости
39. Как по каталожным данным а.д. определить S Kp
Sн=n1-nн/n1; Sкр=Sн(M*кр+√М*2кр-1)
Как по каталожным данным ДПТ можно определить сопротивление цепи якоря
Rя ≈ ΔPн/2*I2н=0,5*Rн*(1-ηн)=0,5*Uн/Iн*(1-ηн)
где Rн=Uн/Iн≠Rя условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток
Как по каталожным данным можно построить механическую характеристику ДПТ независимого возбуждения.
На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов МКР к МН и номинальное скольжение sH (при отсутствии величин сопротивлений). Для расчета кривой M = f (s) формулу Клосса используют в следующем порядке: 1) по каталожным данным МН , MKP MH и sH определяют sKP ; 2) зная отношение Mкр/Мн и SKP , задаются значениями s от 1 до 0 и по формуле определяют момент в относительных единицах.
При известном значении номинального момента можно перевести относительные единицы момента в именованные. В области малых скольжений слагаемые
sKP s и 2sKP в формуле значительно меньше s sKP и ими можно пренебречь. Тогда участкикривых M = f (s) и n = f (M) при малых скольжениях будут
практически прямолинейными: минальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший
наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса: M/Mкр=2/(Sкр/S+S/Sкр)
Для исследования одного режима выведенная формула дает приемлемую для большинства расчетов точность.
Как по формуле Клосса построить м.х. а.д.
Часто построение кривых моментов ведут по упрощенной формуле Клосса:
M/Mкр=2/(Sкр/S+S/Sкр)
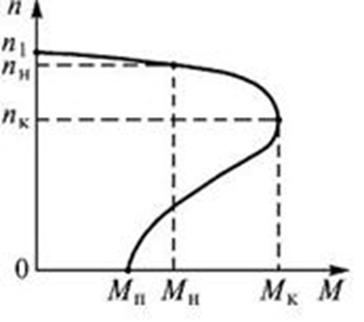
Как строятся механические характеристики ДПТ последовательного возбуждения
В ДПТ с последовательным возбуждением поток возбуждения создаётся током якоря машины, для чего обмотка возбуждения и якорь двигателя включаются последовательно относительно источника питания, как показано на схеме.
Обычно при токах Iя< (0,8-0,9)Iном магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения Ф=К*IE. При больших токах якоря Iя>Iяном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным. Подставив в уравнение n=U-IяR*я/CeФ где R*я=Rя+RE - сопротивление обмотки возбуждения, значение Ф=К*∙Iв получимn=U-Iя∙R*я/Ce∙K*∙Iя=C1U/IяC2
Зная, что Mэм=См∙Ф∙Iя получим Мэм=См∙К*∙I2я, гдеC1, C2, C3 – постоянные. Поскольку в установившемся режиме Mэм =M, то Iя = √M/C3 и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок M <Mном принимает вид n=C1∙(U/√M/C3)-C2 которому соответствует гиперболическая кривая
Дата добавления: 2018-02-15; просмотров: 865; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!