Структурная схема механической части электропривода
Механическая часть электропривода включает в себя движущиеся массы двигателя, передачи и рабочей машины. Структурные схемы механической части должны учитывать упругие связи и распределение моментов инерции между двигателем и рабочей машиной. Многомассовые упругие системы чаще всего сворачиваются в двухмассовые системы с присоединением малых маховых масс к звеньям механической части, обладающими большими маховыми массами, т.е. к ротору двигателя и рабочей машине. Дифференциальные уравнения, описывающие поведение двухмассовой упругой системы, без учёта диссипативных сил и зазоров в передаче, имеют вид:

Сделав необходимые преобразования, получим систему дифференциальных уравнений:

Коэффициенты при производных представляют собой постоянные времени:
– двигателя

– упругого звена

- рабочего органа

Структурная схема двухмассовой упругой системы приведена на рисунке 6.
Рисунок 6 - Структурная схема двухмассовой упругой системы
13. Статической устойчивостью называют способностьэлектропривода (самостоятельно) автоматически восстанавливать устойчивое равновесие при незначительных и плавных нарушениях режима.
Причем нарушения режима настолько малы, что можно пренебречь влиянием механической и электромагнитной инерции.
Статическая устойчивость обеспечивается за счет способности электродвигателя к саморегулированию.
Вставка M 255
Электропривод представляет собой электромеханическую систему, которая должна работать устойчиво.
Электропривод работает устойчиво в установившемся режиме.
Напомним, что установившимся режимом электропривода называется режим, при котором скорость привода не изменяется, потому что вращающий электромагнитный момент двигателя равен тормозному моменту механизма:
М = М  .
.
Поясним это на примере (рис. 12.2 а). 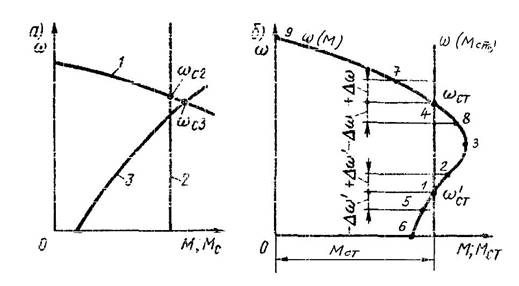
Рис. 12.2 Совмещенные механические характеристики электродвигателя и механизмов электродвигателя 1; лебедки (крана) 2; центробежного насоса 3
На рис. 12.2а изображены механические характеристики: электродвигателя 1; лебедки (крана) 2; центробежного насоса 3.
Точка пересечения механических характеристик электродвигателя и механизма соответствует установившемуся режиму работы привода, потому что именно в этой точке угловая скорость электродвигателя равна угловой скорости механизма, и, аналогично, вращающий электромагнитный момент двигателя равен тормозному моменту механизма.
Пусть один и тот же электродвигатель, имея механическую характеристику 1, поочередно используется в электроприводе крана (характеристика 2), а затем - насоса (характеристика 3).
Тогда двигатель будет работать устойчиво либо со скоростью ω  (кран), либо со скоростью ω
(кран), либо со скоростью ω  (насос).
(насос).
Для проверки устойчивости систему надо перевести из статического режима работы в динамический, создав внешнее возмущающее воздействие.
Таким воздействием может служить: для лебедки скачкообразное увеличение веса груза, для насоса – скачкообразное изменение степени открытия клапана.
Напомним, что систему называют устойчивой, если она, будучи выведена из состояния равновесия и предоставлена самой себе, с течением времени вернется к старому установившемуся состоянию или перейдет в новое такое состояние.
На устойчивость электроприводов влияет множество факторов, к основным из которых относятся:
1. эксплуатационные характеристики электродвигателей;
2. изменение параметров питающей сети и самого двигателя.
Рассмотрим поочередно действие каждого из перечисленных факторов на устойчивость работы электропривода
14.Механические характеристики.
Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристикасоответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнения электромеханической ω=f(Iя) и механической ω=f(Mэм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
Uя=Eя+Iя)(Rя+Rд), (5.35)
где Rя– активное сопротивление якоря.
Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
ω=(Uя-Iя(Rя+Rд))/kФ. (5.36)
В соответствии с (5.10) ток якоря Iя=Mэм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
ω=Uя/ kФ – ( Rя+ Rд)/( kФ)2)Mэм.. (5.37)
Это уравнение можно представить в виде ω= ωо.ид.- Δ ω, где
ωо.ид.=Uя/kФ (5.38)
ωо.ид - угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм.[(Rя+Rд)/(kФ)2]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на

Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности.
Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм.<0, и обеспечивают саморегулирование двигателя, т.е. он автоматически приспосабливается к изменяющейся нагрузке. Увеличение статического момента сопротивления на валу двигателя приводит к уменьшению угловой скорости и ЭДС якоря. Ток якоря, выражение для которого можно записать на основании (5.35),
Iя= (Uя-Eя)/(Rя+ Rд)=(Uя-kωФ;)/( RяRд), (5.39)
возрастает. Соответственно растет электромагнитный момент вплоть до нового значения момента сопротивления (переход из точки А в точку В на механической характеристике).
По аналогии на основании (5.37) может быть построено семейство искусственных характеристик при различных значениях Uяили Ф. Анализ таких характеристик будет проделан в разделе исполнительных двигателей постоянного тока
Дата добавления: 2018-02-15; просмотров: 1406; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!