Мощность двигателя горизонтального перемещения крана

Где G – вес перемещаемого груза, кГ; G0 – собственный вес механизма, кГ;
r – радиус шейки колеса, см;
R – радиус шейки колес, см; v – скорость передвижения моста, м/сек;
ƒ – коэффициент трения качения; µ – коэффициент трения скольжения;
η – КПД механизма перемещения;
k – 1,2 – 3,0 – коэффициент учитывающий трение реборд о рельсы при перекосах
29
Особенности электропривода обкаточно испытательных стендов автотракторных двигателей.
1 Принцип работы стендов Тормозные установки, применяемые для испытаний трак- торных и автомобильных двигателей, в зависимости от прин- ципа действия подразделяются на три вида: механические, гидравлические и электрические. Электрические тормоза по сравнению с механическими и гидравлическими обладают рядом преимуществ. Основное из них состоит в том, что вследствие обратимости тормозной электрической машины из генератора в электродвигатель эта машина может служить источником механической энергии, что весьма важно для пуска двигателя и проведения холодной обкатки. Электрический тормоз создает устойчивую нагрузку для испытуемого двигателя в достаточно широком диапазоне частот вращения. Они удобны и просты в обслуживании. Нагрузка в них регулируется очень плавно и тонко. Характеристика тормоза определяет устойчивость равно- весного режима его работы. Под устойчивостью работы пони- мается способность тормоза к саморегулированию. Он должен поддерживать постоянную частоту вращения при неизменном положении регулирующих органов тормоза и двигателя и вос- станавливать ее при кратковременном нарушении равновесия между крутящим моментом двигателя и моментом сопротивле- ния тормоза. При работе двигателя с неполной нагрузкой характеристи- ки тормозов и двигателя пересекаются в точке В (рис. 1). При нарушении равновесия тормозного и крутящего момента дви- гателя частота вращения вала двигателя изменится на Dn, при уменьшении Ме до точки В1 частота вращения возрастет до (nв + Dn), а при увеличении Ме до точки В1 частота вращения уменьшится до (nв - Dn). Таким образом, при повышении частоты вращения Мтм = const и избыточный момент составляет DМм = Мтм – Ме, Мтэ возрастает на величину DМэ, Мтг - на величину DМг. Под дей- ствием избыточного тормозного момента частота вращения коленчатого вала изменится до значения nв и восстановится 6 первоначальный режим (точка В). Рисунок 1 – Характеристика устойчивости различных типов тормозов: Ме - крутящий момент двигателя; Мтм, Мтг, Мтэ - характеристики меха- нического, гидравлического и электрического тормозов В случае увеличения Ме, частота вращения вала двигателя уменьшится до (nв – Dn), тогда избыточный момент составит DМ = Ме – Мт, и под его действием частота вращения повысится до nв и восстановится первоначальный режим. Анализ значений избыточных моментов различных тормо- зов показывает, что наиболее устойчивым является гидравли- ческий тормоз, т.к. DМг > DМэ > DМм. Наименее устойчивым является механический тормоз. Аналогично можно рассмот- реть устойчивость работы тормозов в точке А, в которой вели- чина избыточного момента гидротормоза будет еще больше и устойчивость тормоза будет лучше. Тогда как избыточный мо- мент механического тормоза будет незначителен и при опре- деленном снижении частоты вращения двигатель может за- глохнуть. Это значит, что механический тормоз не обладает саморегулированием в режиме устойчивой работы двигателя и требует непрерывной регулировки.
9
Инерционная характеристика машины
Инерционная характеристика машины представляет собой данные о величине момента инерции машины и законов его изменения от различных факторов.
Величину момента инерции машин определяют массами движущихся деталей и грузов и радиусами инерции. Приведенный к валу двигателя момент инерции зависит также oт кинематической характеристики системы двигатель—машина.
Величину приведенного к валу двигателя момента инерции машины необходимо определить как для холостого хода, так и для работы под нагрузкой.
Приведенный к валу электродвигателя момент инерции машины определяют, исходя из равенства запасов кинетической энергии до приведения и после приведения.
 , ( 16)
, ( 16)
где Jм – момент инерции частей машины, совершающих вращательное движение с частотой ωм, кг·м2; m — масса деталей и грузов, совершающих поступательное движение, кг; υ - скорость поступательного движения, м/с; ωД — частота вращения вала двигателя, рад/с.
Для деталей цилиндрической формы (темы4, 6, 8, 9) момент инерции относительно оси их вращения определяют по формуле:
 ( 17)
( 17)
где т - масса вращающейся детали, кг; R - геометрический радиус детали, м.
При работе под нагрузкой момент инерции увеличивается за счет массы перемещаемого материала.
Момент инерции редукторов следует принимать ориентировочно равным 1,1 момента инерции двигателя. Момент инерции ДВС (тема 11) принимают равным моменту инерции ЭД.
В каталогах на ЭД в настоящее время приводят величину махового момента (GD2) в кг·м2. Для получения момента инерции в системе СИ необходимо воспользоваться соотношением:
 ( 18)
( 18)
При расчетах приводных характеристик РМ следует учитывать только сведения, приведенные в задании. Отсутствие данных для определения усилий или моментов инерции некоторых деталей указывает на то, что этими величинами при расчетах можно пренебречь.
13
Способы улучшения пусковых свойств асинхронных короткозамкнутых двигателей
при пуске имеет две проблемы:
1) малый пусковой момент Мп;
2) большой пусковой ток Iп.
Если мал пусковой момент Мп, то двигатель долго разгоняется, что снижает его производительность.
Большой пусковой ток Iп плохо влияет на внешнюю сеть - возможна посадка напряжения
 При пуске АД с короткозамкнутым ротором применяют прямое включение. Напряжение сети равно номинальному напряжению АД, непосредственно подводимого к статорной обмотке.
При пуске АД с короткозамкнутым ротором применяют прямое включение. Напряжение сети равно номинальному напряжению АД, непосредственно подводимого к статорной обмотке.
Такой способ пуска применяют для АД с малой мощностью.
Если P>100 кВт, то пуск АД производят при пониженном напряжении
2) АВТОТРАНСФОРМАТОРНЫЙ СПОСОБ ПУСКА
 Автотрансформатор (АТ) подключают к обмотке статора
Автотрансформатор (АТ) подключают к обмотке статора
В момент пуска  ,
,
где kA - коэффициент трансформации АТ.
Соответственно

Следовательно пусковой ток уменьшается в kA2 раз.
Отметим, что поскольку  , следовательно пусковой момент также уменьшается в kA2 раз.
, следовательно пусковой момент также уменьшается в kA2 раз.
Поэтому такой способ пуска возможен только при пуске АД без нагрузки, т.е. на холостом ходу.
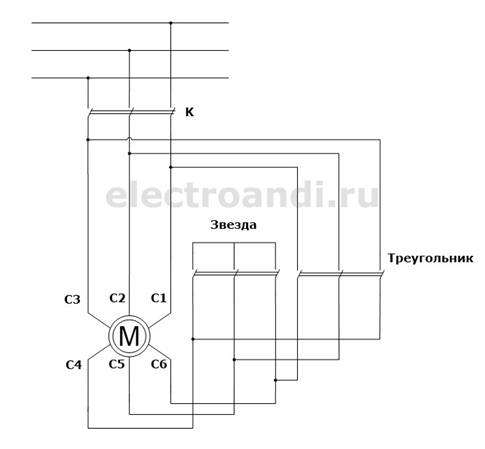
 ПУСК ПЕРЕКЛЮЧЕНИЕМ ОБМОТКИ СТАТОРА
ПУСК ПЕРЕКЛЮЧЕНИЕМ ОБМОТКИ СТАТОРА
СО ЗВЕЗДЫ НА ТРЕУГОЛЬНИК
Если в процессе работы АД обмотка статора должна быть соединена треугольником, то во время пуска ее соединяют звездой.
При этом напряжение АД уменьшается в  раз, а пусковой ток и пусковой момент понижаются в 3 раза.
раз, а пусковой ток и пусковой момент понижаются в 3 раза.
В положении 1 обмотка статора соединена звездой при пуске. Когда скорость АД примерно равна номинальной, то рубильник переключают в положение 2
14
Кроме реостатного и прямого способов пуска асинхронных двигателей существует другой распространенный способ – переключением со звезды на треугольник.
Способ переключения со звезды на треугольник используется в двигателях, которые рассчитаны на работу при соединении обмоток треугольником. Этот способ осуществляется в три этапа. В начале, двигатель запускают при соединении обмоток звездой, на этом этапе двигатель разгоняется. Затем переключают на рабочую схему соединения треугольник, причем при при переключении нужно учитывать пару нюансов. Во-первых, нужно правильно рассчитать время переключения, потому что если слишком рано замкнуть контакты, то не успеет погаснуть электрическая дуга, а также может возникнуть короткое замыкание. Если переключение будет слишком долгим, то это может привести к потери скорости двигателя, а в следствии к увеличению броска тока. В общем, нужно четко скорректировать время переключения. На третьем этапе, когда обмотка статора уже соединена треугольником, двигатель переходит в установившийся режим работы.
Смысл этого способа в том что, при соединении обмоток статора звездой, фазное напряжение в них понижается в 1,73 раз. В такое же количество раз уменьшается и фазный ток, который протекает в обмотках статора. При соединении обмоток статора треугольником фазное напряжение равно линейному, а фазный ток в 1,73 раза меньше линейного. Получается, что соединяя обмотки звездой, мы уменьшаем линейный ток в 3 раза.
Чтобы не запутаться в цифрах, давайте рассмотрим пример.
Допустим, рабочей схемой обмотки асинхронного двигателя является треугольник, а линейное напряжение питающей сети 380 В. Сопротивление обмотки статора Z=20 Ом. Подключив обмотки в момент пуска звездой, уменьшим напряжение и ток в фазах.

Ток в фазах равен линейному току и равен

После разгона двигателя, переключаем со звезды на треугольник и получаем уже другие значения напряжений и токов. 
Как видите линейный ток при соединении треугольником больше в 3 раза линейного тока при соединении звездой.
Данный способ запуска асинхронного двигателя применяется в тех случаях, когда присутствует небольшая нагрузка, либо когда двигатель работает на холостом ходу. Это связано с тем, что при уменьшении фазного напряжения в 1,73 раза, согласно формуле для пускового момента которая предоставлена ниже, момент уменьшается в три раза, а этого недостаточно, чтобы совершить пуск с нагрузкой на валу.
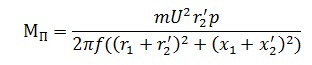
Где m – количество фаз, U – фазное напряжение обмотки статора,f – частота тока питающей сети, r1,r2,x1,x2-параметры схемы замещения асинхронного двигателя,p – число пар полюсов.
Дата добавления: 2018-02-15; просмотров: 950; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!