Пуск двигателей с использованием фрикционных фрикционноцентробежных и электромагнитных муфт
Муфта – устройство, предназначенное для соединения концов валов или для соединения валов с расположенными на них деталями.
Основное назначение: передача вращающего момента без изменения его модуля и направления.
Функции, выполняемые муфтами: предохранение механизма от перегрузок, компенсирование несоосности валов, разъединение или соединение валов во время работы и др. Фрикционные сцепные муфты передают вращающий момент между полумуфтами за счет сил трения на рабочих поверхностях Фрикционные муфты:
а – однодисковая; б – многодисковая; в – конусная
В начальный период касания полумуфт происходит относительное проскальзывание их рабочих поверхностей (смазанных или сухих), и тем самым обеспечивается плавность включения муфты. При установившемся движении проскальзывание не происходит, а при перегрузке муфта пробуксовывает, что предохраняет машину от поломок.
Фрикционные муфты должны обладать надежностью сцепления, высокой износостойкостью и теплостойкостью контактирующих поверхностей. Материал трущихся деталей (накладок) выбирается в зависимости от среднего контактного напряжения (давления):
,  (7.3)
(7.3)
где Fa – осевая сила;
Т – вращающий момент;
k = 1,3…1,5 – коэффициент запаса сцепления;
Dm – средний диаметр контакта;
f – коэффициент сцепления (трения покоя);
z – число пар поверхностей трения;
А = πDmb – площадь поверхности трения;
b – ширина поверхности трения;
[p] – допускаемое контактное напряжение.
По формуле (7.3) может быть рассчитан вращающий момент, который может передавать фрикционная муфта. Для увеличения передаваемого вращающего момента можно увеличить число пар поверхностей трения.
Многодисковые фрикционные муфты имеют небольшие габариты и не требуют большого усилия для их включения.
27
ОСОБЕННОСТИ ЭЛЕКТРОПРИВОДА ВЕНТИЛЯЦИОННЫХ УСТАНОВОК
Вентиляционные установки применяют для вентиляции различных животноводческих и птицеводческих помещений, для хранения и сушки сельскохозяйственных продуктов. Доказано, что состояние животных и птиц, производительная способность и устойчивость к различным заболеваниям в значительной мере определяются такими параметрами микроклимата, как температура и влажность воздуха, направление и скорость воздушных потоков в зоне размещения животных, концентрация вредных газов и т. д. Поэтому современные животноводческие хозяйства оборудуются установками микроклимата, в которых основным звеном является вентилятор.
Различают вентиляционные установки с естественной тягой, с механическим побуждением тяги и комбинированного действия.
Для расчета вентиляционной установки необходимо определить количество воздуха, которое вентилятор должен удалить из помещения или подать в него за единицу времени. Зная это количество воздуха, можно найти подачу вентилятора Q, которая определяется по наибольшему расходу воздуха, м3/с. Далее выбирают давление Н из расчета подачи воздуха к самой удаленной точке воздухопровода. Мощность электродвигателя, Вт, определяется подачей и давлением, развиваемыми вентилятором.
Подачу вентиляционных установок можно регулировать многопозиционным изменением числа включенных вентиляторов, сечением воздуховода; частотой вращения двигателей вентиляторов.
Критическое скольжение, не зависящее от напряжения, остается неизменным. Не изменяется также и синхронная угловая скорость, которая зависит только от частоты питающего напряжения и числа пар полюсов двигателя. Регулирование угловой скорости двигателя при этом способе происходит вследствие уменьшения жесткости механических характеристик и осуществляется вниз от номинальной угловой скорости. Плавность регулирования определяется плавностью изменения напряжения; при применении тиристорного регулятора напряжения угловая скорость регулируется бесступенчато. Достоинство этого способа — относительная простота. На рис. 2 приведены механические характеристики асинхронного двигателя с короткозамкнутым ротором при регулировании напряжения. Как это следует из рис. 49.7, такой способ рекомендуется при вентиляторном характере нагрузки (Мс = п2).
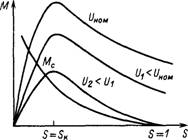
Рис. 2. Механические характеристики асинхронного двигателя при регулировании напряжением
ЭЛЕКТРОПРИВОД ВЕНТИЛЯЦИОННЫХ УСТАНОВОК В ЖИВОТНОВОДЧЕСКИХ И ПТИЦЕВОДЧЕСКИХ ПОМЕЩЕНИЯХ
В современных животноводческих и птицеводческих помещениях применяется комплектное электрооборудование «Климатам», которое имеет три исполнения: «Климат-44» с вентиляторами типа ВО-4 (до 30 шт.), «Климат-45» с вентиляторами типа ВО-5,6 (до 20 шт.) и «Климат-47» с вентиляторами типа ВО-7 (до 10 шт.).
Применение группы регулируемых вентиляторов позволяет создать необходимую степень дробления приточно-вытяжных струй, равномерное смещение приточного и внутреннего воздуха, а также одинаковую температуру в помещении. Напряжение питания изменяют в пределах 380—70 В при помощи автотрансформатора типа AT-10 с отпайками.
Для расширения диапазона регулирования вентиляционной установки все вентиляторы, входящие в нее, разделены на три группы. В систему управления установкой входят два трехпозиционных терморегулятора типа ПТРЗ, настроенные на разные температуры срабатывания.
Если температура воздуха помещения соответствует заданной, то замкнуты контакты терморегуляторов А1-2, А2-1, А2-2, поэтому включены пускатели К2, К4, К5 (рис. 3). Электродвигатели работают при определенной частоте вращения. Если температура повысилась на заданное число градусов, замыкается контакт Al-1 (А1-2 разомкнут) и получают питание пускатели КЗ, К5. При этом частота вращения двигателя повысится.
При понижении температуры замыкаются контакты AI-3, А2-1, А2-2, в цепь вводятся катушки пускателей К1, К4, К5 и двигатели начинают работать с частотой вращения, меньшей чем при работе с заданной температурой воздуха. Если температура продолжает снижаться, то замкнутым окажется только контакт А2-2 и пускатель К4 отключает группу двигателей № 3. При дальнейшем снижении температуры отключается пускатель К5, остается включенной только
одна группа вентиляторов. При падении температуры ниже предельной замыкается контакт А2-3 и выдается аварийный сигнал.
28
выбор мощности двигателя для механизма перемещения,подъема.
Статические и динамические нагрузки крановых механизмов определяют выбор систем электроприводов и требования к ним.
При выборе системы электропривода крановых механизмов следует учитывать следующие особенности их работы: широкий диапазон изменения моментов сопротивления; необходимость реверсирования; ограничение, момента в элементах механизмов; обеспечение работы на пониженной скорости; ограничение ускорений.
Желаемые механические характеристики механизмов подъема крана приведены на рис. 4. Характеристика 1п используется для подъема грузов с пониженной скоростью и предназначена для выбора слабины канатов и точной установки груза при монтажных операциях. Характеристики 2п и 3п служат для подъема грузов с промежуточной и номинальной скоростями. Характеристика 4п требуется для подъема малых грузов с повышенной скоростью с целью повышения производительности кранов; скорость при работе на этой характеристике превышает в 2 раза номинальную.
Характеристика 1 с служит для спуска грузов с малой скоростью, что требуется для точной установки груза при его спуске. Характеристики 2с и 3с используются для спуска грузов с промежуточной и номинальной скоростями, а характеристика 4с — для спуска легких грузов с повышенной скоростью, что также повышает производительность работы кранов.
Показанные на рис. 4 вертикальные участки характеристик требуются для ограничения моментов и ускорений при пусках и торможениях механизма. По условиям эксплуатации удобно обеспечить примерно одинаковое время переходных процессов для подъема и спуска грузов. При этом стопорные моменты на характеристиках подъема и спуска должны различаться между собой, что объясняется разными моментами сопротивления при подъеме и спуске грузов (см. заштрихованные на рисунке области изменения Мс, обусловленные изменением массы груза). Из-за этого электроприводы механизмов подъема имеют несимметричные относительно начала координат характеристики, т. е. при подъеме и спуске грузов используются различные семейства механических характеристик.
Рис. 4. Желаемые механические характеристики механизмов подъема крана
Мощность двигателя подъёма крана при подъёме груза:
Где G – вес поднимаемого груза, кГ;
G0 – вес захватывающего приспособления, кГ;
v – скорость подъёма, м/сек;
η – КПД подъёмного механизма
Мощность двигателя подъёма крана при опускании груза:

При η > 0,5 – тормозной спуск груза (генераторный режим двигателя).
При η < 0,5 – силовой спуск груза (двигательный режим двигателя).
Дата добавления: 2018-02-15; просмотров: 934; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!