Функциональная схема микропроцессорной системы
Министерство науки и высшего образования Российской Федерации
ФГБОУ ВО
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Электропривода и электрического транспорта
 Допускаю к защите
Допускаю к защите
Руководитель  Сартаков В.Д.
Сартаков В.Д.
Микропроцессорная система управления пуском ЭД по линейному закону
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине
Микропроцессорные средства и системы
1.08.00.00.ПЗ
Выполнил студент группы ЭлТбп-17-1 _______ Шепелев И.И.
подпись И.О. Фамилия
Нормоконтроль _______ Сартаков В.Д.
подпись И.О. Фамилия
Курсовая работа защищена с оценкой

Иркутск 2021 г.
Министерство образования и науки Российской Федерации
ФГБОУ ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
|
|
|
 УТВЕРЖДАЮ
УТВЕРЖДАЮ
Зав. кафедрой
О. В. Арсентьев_____________
«__19_»_сентября__2019___г.
ЗАДАНИЕ
НА КУРСОВОЙ ПРОЕКТ
по дисциплине «Компьютерные технологии в электрическом транспорте»
Студенту группы ЭЛТ БП-17 Шепелеву И.И.
Тема проекта Микропроцессорная система управления пуском ЭД по линейному закону, вариант №8
Исходные данные:
1.Двигатель питается от силового преобразователя (широтно-импульсного преобразователя - ШИП). 2.Обратная связь по скорости отсутствует. 3.Параметры двигателя, силового преобразователя и режима пуска заданы в табл. 1.
Контроль скорости производится либо с помощью тахогенератора, либо импульсного датчика скорости.
Таблица 1. Параметры двигателя и силового преобразователя (вар. №34)
-
 Разработать функциональную схему микропроцессорной системы для управления пуска двигателя по линейному закону и текущего измерения скорости двигателя. Описать взаимодействие узлов системы
Разработать функциональную схему микропроцессорной системы для управления пуска двигателя по линейному закону и текущего измерения скорости двигателя. Описать взаимодействие узлов системы - Составить математическую модель заданной микропроцессорной системы электропривода.
- Разработать в соответствии с вариантом детализированную структурную схему микропроцессорного устройства для управления пуском двигателя по линейному закону и текущего измерения скорости.
- Рассчитать интервал дискретности реализуемой МПС.
- Выбрать и обосновать выбор элементов разрабатываемой микропроцессорной системы (МПС).
- Разработать структурную схему алгоритма управления пуском двигателя по линейному закону и измерения скорости двигателя. Составить подробный комментарий и математическое обоснование к каждому блоку структурной схемы алгоритма.
- Разработать программу, реализующую управление пуском двигателя по линейному закону. Привести в пояснительной записке текст программы.
- Разработать схему подключения ПМК к источнику питания, тахогенератору и силовому преобразователю.
Рекомендуемая литература 1.В. Д. Сартаков. Микропроцессорные средства и системы/ Конспект лекций в формате презентаций, 2009. 2. В. Д. Сартаков, М. П. Дунаев Микропроцессорные средства и системы. Методические указания по выполнению курсового проекта. Изд-во ИрГТУ, Иркутск, 2006. 3.В. Д. Сартаков Промышленные микропроцессорные контроллеры./Учебное пособие, Иркутск, Изд-во ИрГТУ 2005.
|
|
|
Графическая часть на _______2_______ листах.
|
|
|
Дата выдачи задания “____19__” _______сентября___________________2019 г.
 Дата представления проекта руководителю “__10____” _декабря__________2019 г.
Дата представления проекта руководителю “__10____” _декабря__________2019 г.
Руководитель курсового проектирования (курсовой работы) В. Д. Сартаков
Введение
В настоящее время микропроцессорная техника (МП) развивается быстрыми темпами. С помощью микропроцессоров расширяется возможность реализации систем управления (СУ), которые помогают автоматизировать управление электроприводами, технологические комплексы, а также установки и процессы.
Благодаря микропроцессорным системам управления (МПСУ) увеличивается скорость и эффективность работы, упрощается эксплуатация системы, поэтому традиционные системы управления используются все реже
Для работы МП проводится разработка программного обеспечения. Появилась возможность проводить более удобную диагностику, так как реализация большинства функций теперь программируется и автоматически выполняется МПСУ, а показатели этой системы могут быть выведены в более точных значениях.
МПСУ используются на промышленности, в авиационной, водяной и автомобильной технике, поэтому большой спрос на специалистов, которые могут разрабатывать такие системы.
|
|
|
Применение микропроцессоров и микроконтроллеров в системах управления электроприводами является актуальной задачей, т.к. позволяет повысить качество управления и показатели системы электропривода
Функциональная схема микропроцессорной системы
На рисунке 1 представлена функциональная схема, которая содержит:
ПМК = Базовый модуль CPU + Дополнительные модули расширения + ЦАП + АЦП;
СП – силовой преобразователь;
М – электрический двигатель;
РМ – рабочий механизм;
ДС – датчик скорости;
ПМК – промышленный микропроцессорный контроллер выполняет управляющую программу и вырабатывает управляющее напряжение Uу, поступающее на вход СП;
СП – силовой преобразователь усиливает напряжение Uу и управляет электрическим двигателем М;
М – электрический двигатель приводит в движение
рабочий механизм РМ;
ДС – датчик скорости измеряет скорость движения РМ;
В данном случае ДС является аналоговым устройством – тахогенератором.
ЦАП – цифроаналоговый преобразователь преобразует выходной цифровой код ПМК в аналоговый сигнал Uу;
АЦП - аналого-цифровой преобразователь преобразует аналоговое напряжение тахогенератора в цифровой код, который поступает в ПМК.
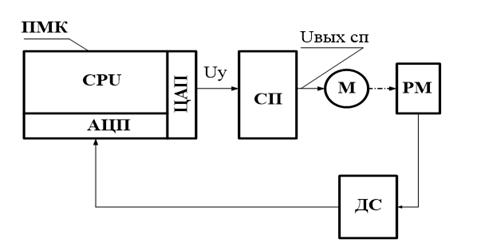
Рисунок 1 – Функциональная схема микропроцессорного устройства для регулирования скорости электропривода.
Дата добавления: 2021-05-18; просмотров: 79; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!