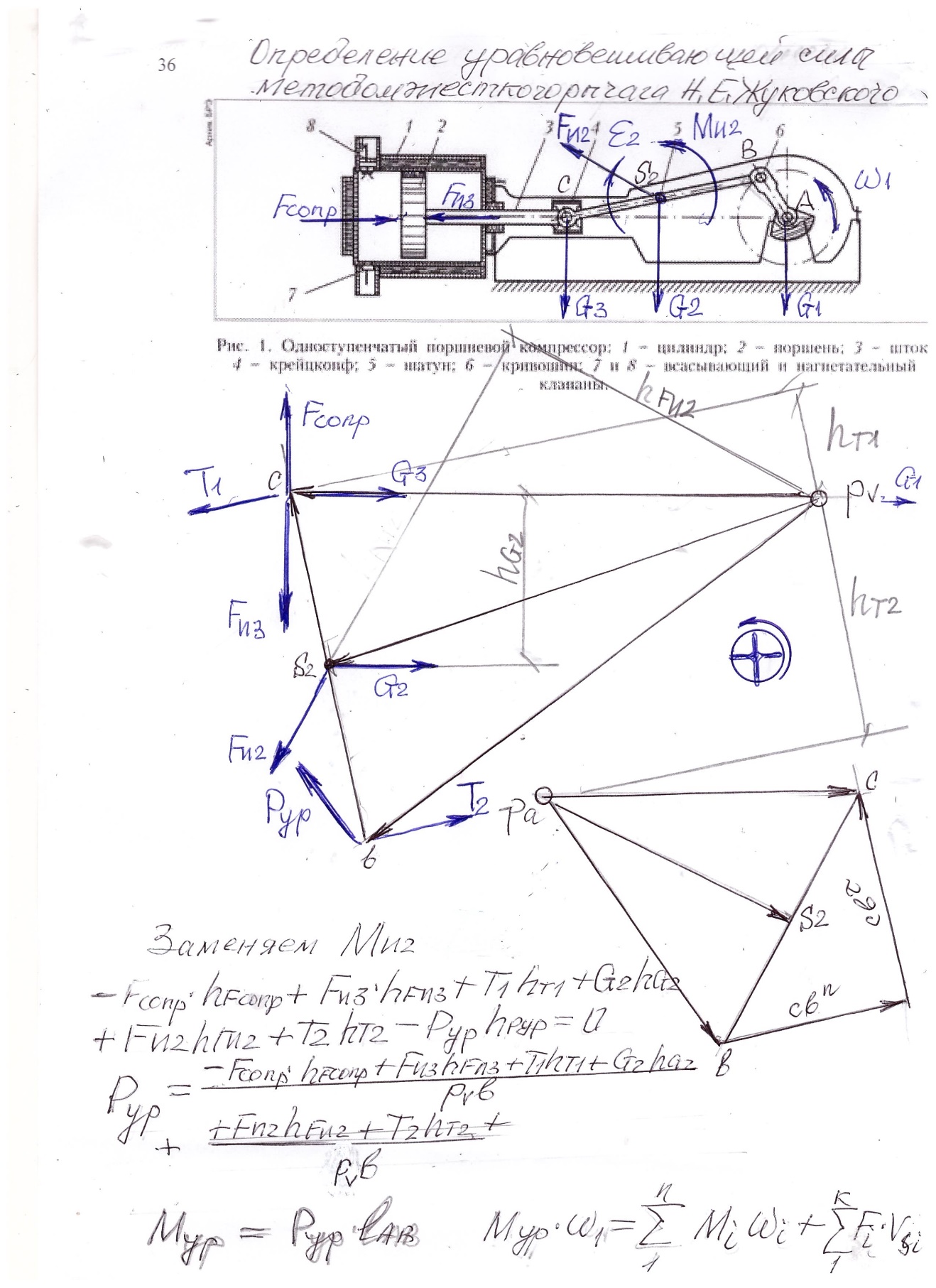
Силовой анализ методом «жесткого рычага»
Жуковского.
Теорема Жуковского: cумма моментов всех сил, приложенных в соответствующей точке плана скоростей повёрнутых на 90º, пропорциональна мгновенной мощности механизма.
Алгоритм:
1. Построить план скоростей и нанести на него вектора всех сил, повернутых на 900 в одну сторону. Найти сумму моментов всех сил относительно полюса
1. Решить уравнение и найти значение уравновешивающей силы
2.
Анализ и реализация полученных результатов
Силового расчета
Полученные результаты используют на этапе эскизного проектирования.
Для полной картины нагружения необходимо провести расчеты для «n» случаев нагружения и выбрать наиболее сложный.
 Определяем по методу Жуковского наибольшую потребную мощность и подбираем двигатель. Номинальная и потребная мощности могут не совпадать. Помнить, что двигатель будет развивать только потребную мощность в независимости от его номинальной.
Определяем по методу Жуковского наибольшую потребную мощность и подбираем двигатель. Номинальная и потребная мощности могут не совпадать. Помнить, что двигатель будет развивать только потребную мощность в независимости от его номинальной.
Далее переходим к подбору подшипников.
С учетом нагружения и обеспечения самоустановки подбираем подшипники качения в шарнирах. Предпочтительнее установка на оси парой.


 Крейцкопф монтируем на подшипнике скольжения.
Крейцкопф монтируем на подшипнике скольжения.
Рассчитываем звенья механизма на прочность (материал + геометрия)

Проектирование кулисного механизма по углу давления .


Дано: HD , , [ ]
|
|
|
Определить: li - ?
Если расположить центр пары А на прямой соединяющей точки С' и С'' , то углы давления
' = ' = / 2,
тогда
Минимальная длина гидроцилиндра
где k = 1.05 - 1.3 - коэффициент учитывающий особенности конструкции гидроцилиндра ( уплотнение, расположение опоры А и др. ).
Размер l4 можно определить из BC A
где cos = - cos ( - ) = - sin ,
и
ТЕОРЕМА ЖУКОВСКОГО (МЕТОД ЖУКОВСКОГО)
Силовой расчет и динамическое исследование механизмов могут быть всегда произведены, если пользоваться принципом возможных перемещений. Согласно этому принципу, если на какую- либо механическую систему действуют силы[1], то, прибавляя к задаваемым силам силы инерции и давая всей системе возможные для данного ее положения перемещения, получаем ряд элементарных работ, сумма которых должна равняться нулю (уравнение работ): 
где bpj — проекция возможного (виртуального) перемещения точки приложения силы F s на направление этой силы.
Так как механизм является кинематической цепью принужденного движения, то есть с вполне определенным движением всех звеньев при заданном движении начальных звеньев, то в механизме действительные перемещения содержатся в числе возможных:
|
|
|

где dpj — проекция действительного перемещения точки приложения силы F] на направление этой силы.
Рассмотрим, как можно представить элементарную работу, входящую в (4.19). Пусть на звено ЛВ в точке С действует сила /), и пусть нам известны скорости точек Ли В (рис. 4.11, а).
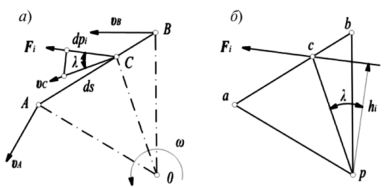
Рис. 4.11. К доказательству теоремы Жуковского: а) схема звена с показанной на ней силой; б) повернутый план скоростей
Действительное элементарное перемещение точки С имеет направление вектора скорости )с. Это направление определяется после построения мгновенного центра вращения О, находящегося на пересечении перпендикуляров, восстановленных в точках А и В к скоростям этих точек. Соединив точку С прямой с точкой О и проведя через точку С прямую, перпендикулярную к ОС, получим направление скорости г>с. Направление действительного перемещения ds точки С совпадает с направлением скорости этой Ос точки. Элементарная работа силы F t равна

где а — угол между т»с и F r
Величину скорости цс удобно определить построением плана скоростей АВ. Для этого строим в произвольном масштабе повернутый план скоростей звена АВ (рис. 4.11, б). На плане скоростей цс изображается отрезком рс, отложенным в масштабе рг> от полюса р плана скоростей в направлении, перпендикулярном -i)c, то есть
|
|
|
Полученное выражение для цс подставляем в (4.20):

Переносим далее силу F t со схемы звена в точку с плана скоростей и из точки р опускаем на направление этой силы перпендикуляр h r При этом перенесении оставляем без изменения величину и направление силы F r Тогда /г, = (pc) cos а и
Произведение величины силы F i на плечо Л, представляет собой величину момента M p (F]) этой силы относительно полюса р плана скоростей. Если разделить полученное уравнение работ на время dt, получим уравнение мощностей. Так как все скорости на плане повернуты в одну сторону, то знак момента для всех сил совпадает со знаком элементарной работы силы, следовательно,

Таким образом, получаем, что элементарная работы силы, действующей на звено механизма, пропорциональна моменту относительно полюса плана скоростей этой же силы, перенесенной в соответствующую точку плана. Уравнение (4.19) можно переписать в виде

или 
Уравнение (4.23) может быть интерпретировано следующим геометрическим образом. Переносим все заданные силы, действующие на звенья механизма в заданный момент времени, в том числе и силы инерции, в одноименные точки повернутого плана скоростей, не изменяя при этом величины и направления этих сил. Составляем уравнение моментов (4.23) всех перенесенных сил относительно полюса плана скоростей, то есть рассматриваем план скоростей как некоторый рычаг (рычаг Жуковского) с опорой в полюсе плана скоростей. Подобная геометрическая интерпретация принципа возможных перемещений представляет значительные удобства для решения многих задач динамики механизмов. Метод этот получил название метода Жуковского по имени известного русского ученого Н.Е. Жуковского, которым он был предложен. Иногда его формулируют в виде следующего утверждения, носящего название теоремы Жуковского: если силу, приложенную к какой-либо точке механизма, перенести параллельно самой себе в одноименную точку плана скоростей, повернутого на 90° в произвольном направлении, то момент силы относительно полюса плана скоростей будет пропорционален ее мощности.
|
|
|
Заметим также, что если кроме сил F) на звенья механизма действуют еще пары сил, моменты которых суть М, , то уравнение (4.19) примет вид 
где фу — углы поворота звеньев, к которым приложены моменты М } .
Моменты М: могут быть также приложены к отрезкам, соответствующим на плане скоростей звеньям механизма, но величина прикладываемого момента М° должна удовлетворять условию

где 1° — отрезок, соответствующий на плане скоростей отрезку /. на схеме. Необходимо только иметь в виду, что знак у момента М° сохраняется, если направление отрезка I] (порядок букв) совпадает
с направлением отрезка и получается противоположным, если направления не совпадают.
увеличивают или уменьшают приведенную движущую силу. Раздельное определение приведенных сил позволяет лучше учесть влияние каждой из них на механизм.
Дата добавления: 2021-05-18; просмотров: 105; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!