Метод кинетостатики основан на принципе Даламбера (Эйлера –Даламбера) :
ЛЕКЦИЯ 6
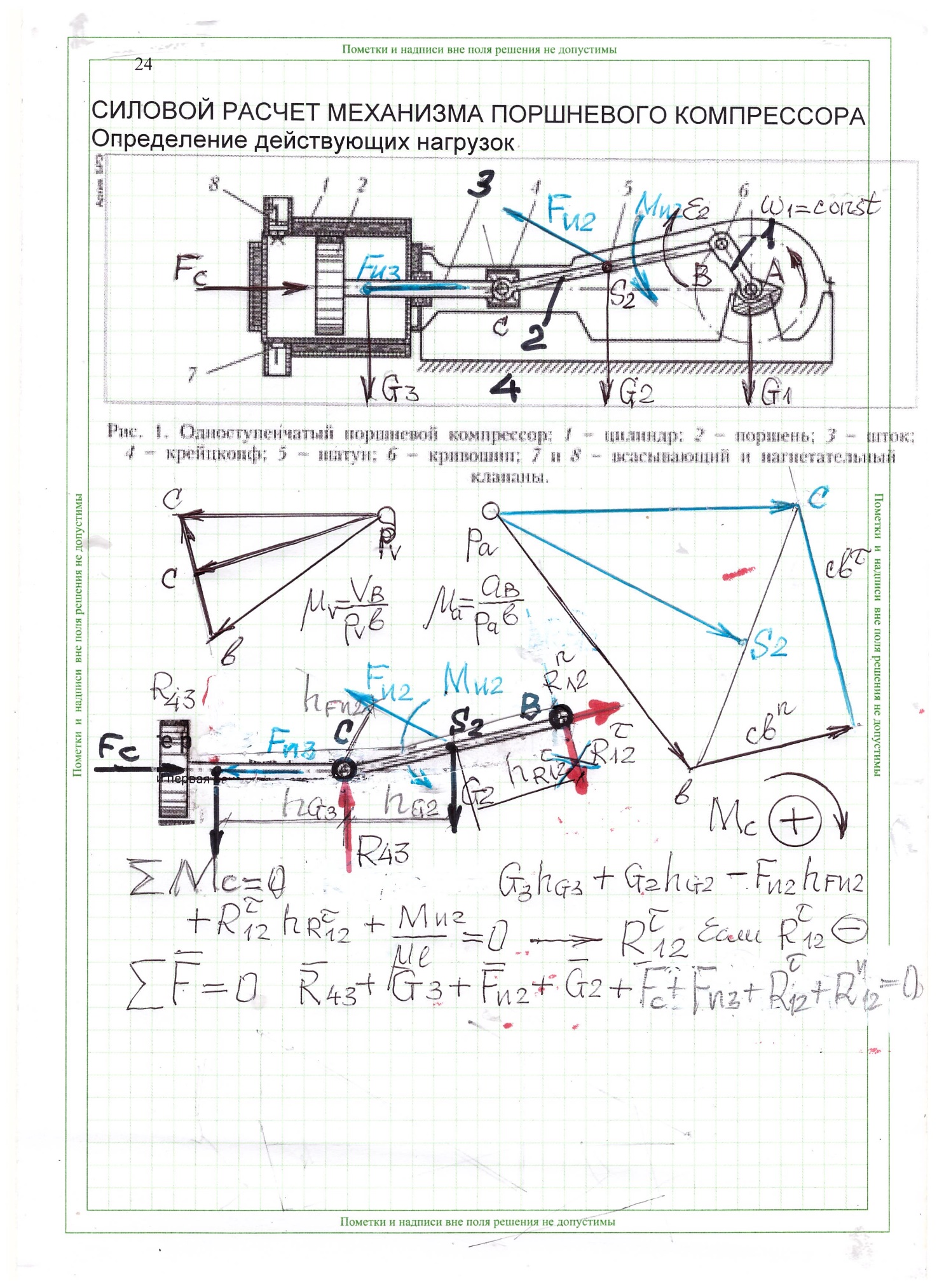
СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА
Движение механизма происходит под действием прилагаемых к звеньям сил и моментов.
Главная задача совершение полезной работы.
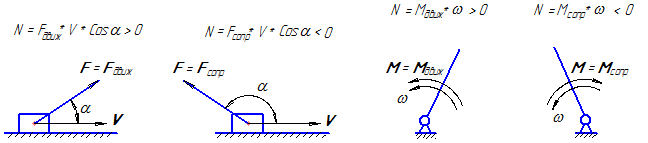
A= FSCos α поступательное движение, P=pV мощность
А= М φ вращательное движение, мощность P=MѠ
При этом в кинематических парах и на стойке возникают различные нагрузки.
Знание этих нагрузок необходимо для прочностного расчета деталей звеньев, определения нагрузок на раму (стойку), подбора подшипников и других расчетов. Значения этих нагрузок могут быть получены только из этого расчета. Это первый этап проектирования механизма.
Характеристики сил и моментов.
Сила – результат взаимодействия двух тел.
а) по взаимодействию звена механизма с другими объектами. силы подразделяют на внешние и внутренние:
· внешние силы – результат взаимодействия звена механизма с телами, не входящими в состав механизма;
· внутренние силы –силы взаимодействия между звеньями механизма (реакции в кинематических парах);
б) по мощности, развиваемой силой: силы движущие и силы сопротивления.
Движущая сила – помогает движению звена, совершает положительную работу и создает положительную мощность;
Сила сопротивления препятствует движению звена и развивает отрицательную мощность.
В свою очередь силы сопротивления можно разделить на силы полезного сопротивления и силы вредного сопротивления:
· силы полезного сопротивления – это силы, для преодоления которых и создан механизм. Преодолевая силы полезного сопротивления, механизм создает полезную работу (например, преодолевая сопротивления резанию на станке, добиваются необходимого изменения формы детали; или, преодолевая сопротивление воздуха в компрессоре, сжимают его до требуемого давления и т.д.);
· силы вредного сопротивления – это силы, на преодоление которых затрачивается мощность и эта мощность теряется безвозвратно. Обычно в качестве вредных сил сопротивления выступают силы трения, гидравлического и аэродинамического сопротивлений.
· NB! Некоторые силы, например, силы веса, могут быть как вредными, так и полезными в зависимости от положения.
· силы веса – это силы взаимодействия звеньев механизма с гравитационным полем земли
Работа по преодолению сил трения переводится в тепло и рассеивается в пространство, поэтому коэффициент полезного действия любого механизма всегда меньше единицы;
;
г) силы трения – силы, сопротивляющиеся относительному перемещению соприкасающихся поверхностей;
д) силы инерции и моменты – это не силы, а свойство массы сохранять состояние движения. Математически сформулированы Даламбером.. В общем случае при неравномерном движении возникает сила инерции и момент сил инерции:
Fин=-m∙as Mин=-Is∙e, где
Fин – главный вектор сил инерции, приложенный в центре масс звена;
Mин – главный момент сил инерции;
m – масса звена;
Is – момент инерции звена относительно центра масс;
as – ускорение центра масс звена;
e – угловое ускорение звена.
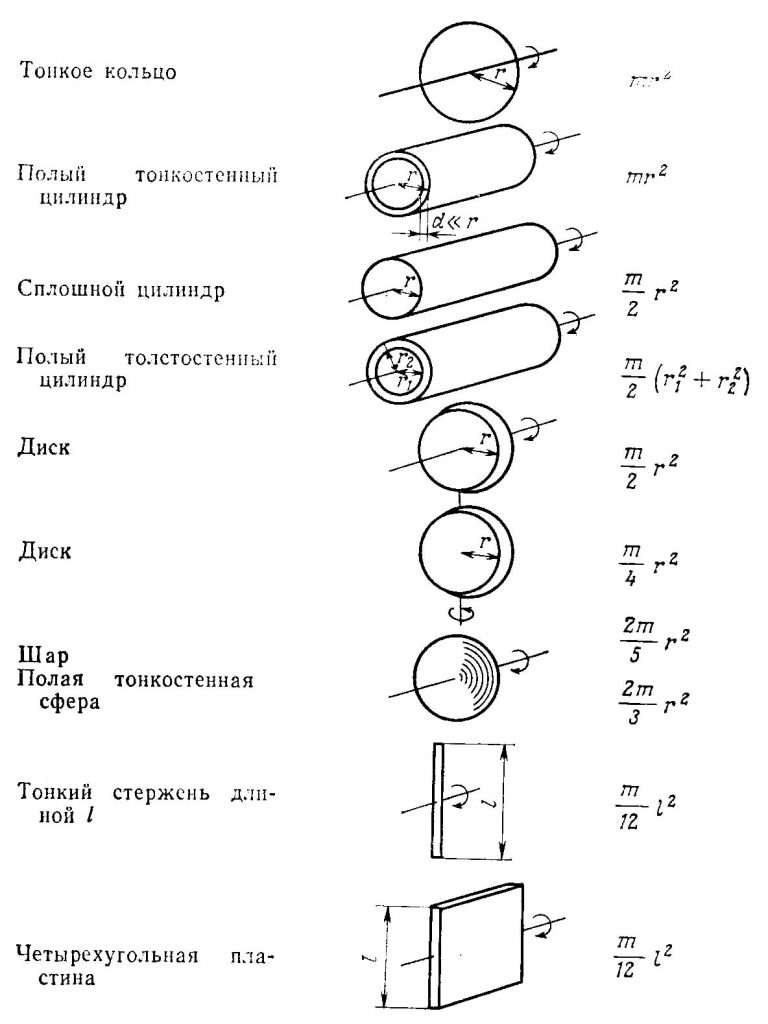
Момент инерции – скалярная физическая величина, мера инертности тела при вращении вокруг оси. Обозначается буквой J и в системе СИ измеряется в килограммах, умноженных на квадратный метр.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении  {\displaystyle J_{a}=\int \limits _{(m)}r^{2}dm=\int \limits _{(V)}\rho r^{2}dV,}
{\displaystyle J_{a}=\int \limits _{(m)}r^{2}dm=\int \limits _{(V)}\rho r^{2}dV,}
где:dm = ρ dV — масса малого элемента объёма тела dV,
ρ — плотность,
r — расстояние от элемента dV до оси a.
Знак минус в формулах показывает, что сила инерции направлена противоположно ускорению центра масс звена, а момент сил инерции направлен противоположно угловому ускорению звена. Знак силы или момента учитывается только при установлении истинного направления силы или момента на расчетной схеме, а в аналитических вычислениях используется абсолютные их значения.

При силовом анализе механизмов для определения неизвестных сил используют уравнения статики.
Механизм является неравновесной системой, т.к. большинство его звеньев имеет неравномерное движение, а точки, принадлежащие этим звеньям, движутся по сложным криволинейным траекториям (напомним: состояние равновесия – это состояние покоя или прямолинейного равномерного движения).
Поэтому для решения поставленной задачи применяется метод кинетостатики.
Метод кинетостатики основан на принципе Даламбера (Эйлера –Даламбера) :
если ко всем внешним силам, действующим на звенья механизма, добавить силы инерции и моменты сил инерции, то данный механизм будет находиться в состоянии статического равновесия.
То есть это искусственный прием, приводящий неравновесную систему в состояние равновесия.
Искусственность приема заключается в том, что силы инерции прикладываются не к тем телам, которые заставляют двигаться звенья ускоренно (замедленно), а к самим звеньям.
Применив этот прием, в дальнейшем можно производить силовой расчет с использованием уравнений статики. Однако, чтобы решить задачу с помощью только уравнений равновесия, система должна быть статически определимой.
Условие статической определимости плоской кинематической цепи:
Для каждого звена, расположенного в плоскости, можно составить три независимых уравнения статики.
На плоскости существуют кинематические пары только пятого и четвертого классов. Пары пятого класса представлены вращательной кинематической парой (шарниром) и поступательной парой (соединение ползуна с направляющей). В шарнире усилие между звеньями может передаваться в любом направлении, поэтому у реакции в шарнире неизвестными являются величина и направление (два компонента). Величина и направление этой реакции неизвестны. Для обеспечения расчета раскладываем ее на две составляющие: нормальную Rn12, направленную вдоль звена, и тангенциальную Rt12 – перпендикулярно звену
В первом приближении расчет ведется без учета сил трения. Перемещаться же поперек направляющей и поворачиваться ползун не может, поэтому в поступательной паре реакция направлена перпендикулярно направляющей
На определение реакции в поступательной паре также надо затратить два уравнения статики (определить два компонента – величину и точку приложения)..
Пары четвертого класса (высшие пары) на плоскости представляют соприкасающиеся между собой профили. В высшей паре усилие между звеньями передается по общей нормали к касающимся профилям (без учета сил трения). Поэтому в высшей паре четвертого класса реакция неизвестна только по величине (точка приложения реакции в точке контакта профилей, направление вдоль общей нормали к этим профилям).
В результате получаем условие статической определимости кинематической цепи: кинематическая цепь статически определима в том случае, когда число неизвестных внешних сил, действующих на ее звенья, не превышает числа степеней подвижности этой цепи.
ПОРЯДОК СИЛОВОГО РАСЧЕТА
1. Выполнить структурный анализ механизма.
2. Определить скорости и ускорения всех точек звеньев механизма методом планов. Определить ускорения центров масс.
3. Определить силы тяжести. По индикаторной диаграмме (механической характеристике) определить движущую силу для соответствующего положения.
4. Определить силы инерции и моменты от сил инерции.
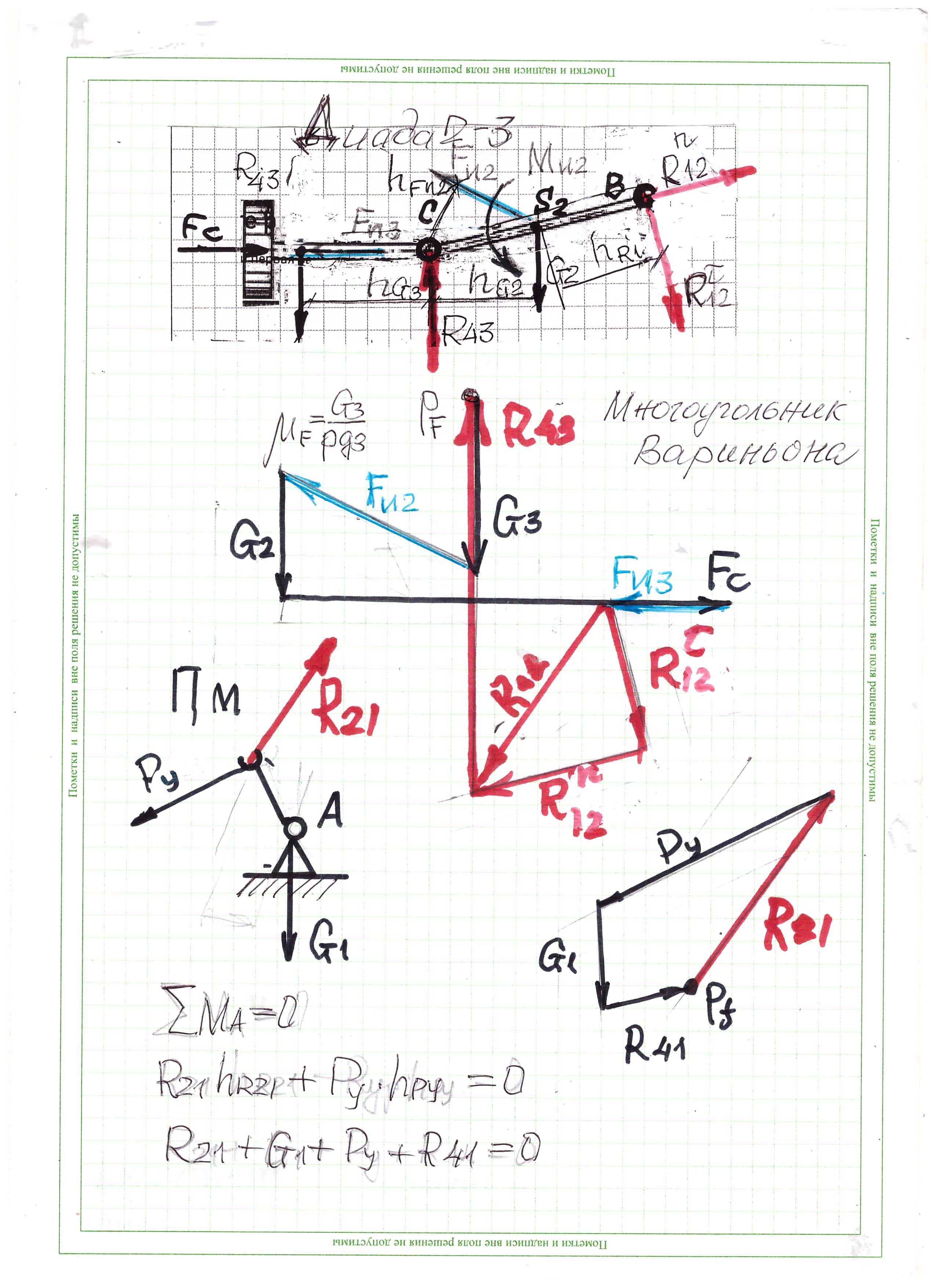
5. Начиная с последней от ведущего звена структурной группы, определить реакции в кинематических парах.
6. Определить уравновешивающую силу Рур из силового расчета ведущего звена.
7. Определить уравновешивающую силу  методом «жесткого» рычага Н.Е.Жуковского.
методом «жесткого» рычага Н.Е.Жуковского.
8. Определить мощность двигателя Nдв.
9. Рассчитать процент ошибки между двумя методами. Расхождение не должно составлять более 5%: Δ=(Рур- ) / Рур ≤ 5%. 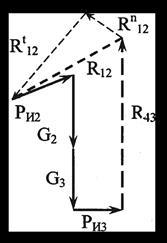
О 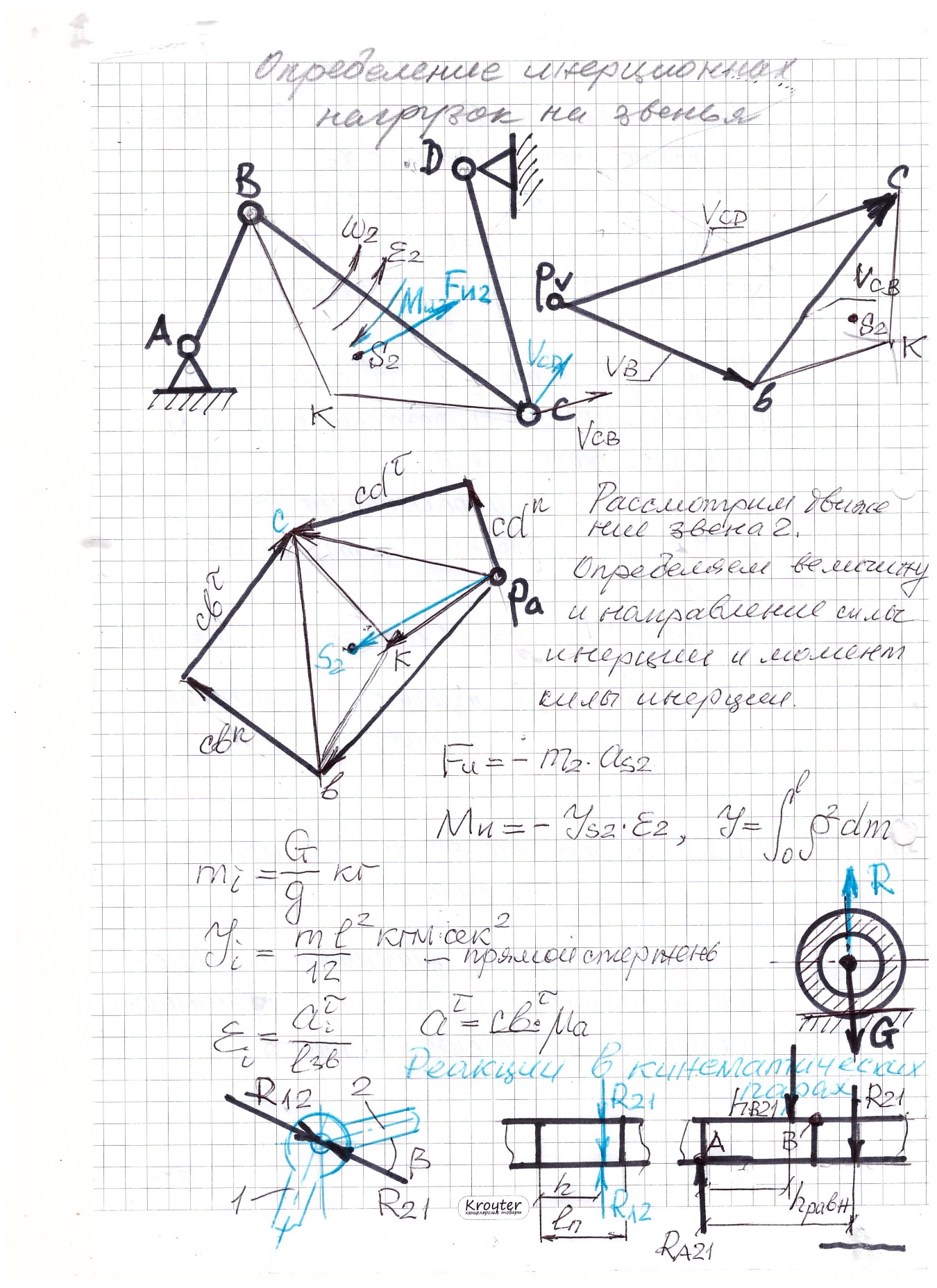

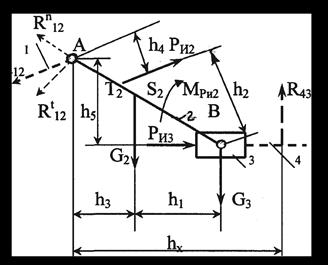
Порядок силового расчета кривошипно–крейцкопфного механизма. Крейцкопф дополнительный ползун, устанавливаемый для разгрузки поршня в компрессорах, насосах, паровых машинах и других механизмах, в которых поршень соединен со штоком.

Дата добавления: 2021-05-18; просмотров: 118; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!