ФУНКЦИОНАЛЬНЫЕ СВОЙСТВА МЕХАНИЗМОВ.
5.1. Трансформизм. Он характеризуется передаточным отношением i 12, равным производной от параметра положения (j2, S2) выходного звена 2 по параметру положения (j1, S1) входного звена 1 (jj – угол поворота, Sj – линейное смещение звена j). Величина i 12 определяется по формулам:
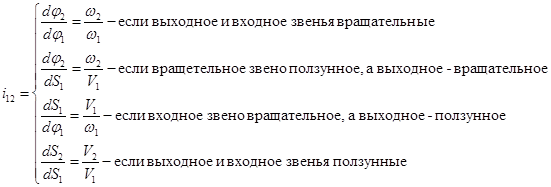
здесь w1, w2, V1, V2 – угловая и линейная скорость звеньев 1 и 2.
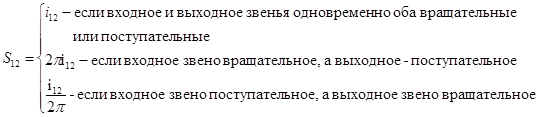
Для механизмов, в которых входные и выходные звенья имеют равномерные движения вместо понятия передаточное отношение i 12 удобнее пользоваться понятием ход Sjk механизма, под которым понимают угловое (или прямолинейное) перемещение ведомого звена 2 за один оборот (или один мм) перемещения ведущего звена 1. В зависимости от типа передач ход S12 равен:
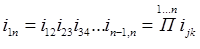
Если механизм сложный (кинематическая цепь механизмов с n подвижными звеньями), то передаточное отношение i1n от звена 1 к звену n равно:
 , (6)
, (6)
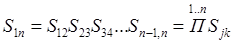
то есть передаточное отношение сложного механизма равно произведению передаточных отношений простых механизмов. Соответственно, если перемещения звеньев в механизме определяется с помощью ходов Sjk простых механизмов, то xод S 1 n сложного механизма:
 (7)
(7)
5.2. Равномерность (линейность) механизма. Это свойство определяется постоянством хода или передаточного отношения в механизме. Если, например, j1 – угол поворота входного звена, j2 – угол поворота выходного звена и j2=i12j1, где i12=const, то механизм линейный; если i12¹const, то механизм неравномерный. Наличие в сложном механизме хотя бы одного простого неравномерного механизма делает весь сложный механизм тоже неравномерным.
|
|
|
В таблице 3 приведены основные типы станочных равномерных механизмов, их ходы S12 и передаточные отношения i12. В примечании к табл.3 указаны расчетные параметры этих механизмов.
Нелинейность движения механизма оценивают коэффициентом неравномерности  равным:
равным:
 , (7)
, (7)
где D - диапазон скоростей, D = Vmax/Vmin ; Vmax, Vmin – скорость (наибольшая и наименьшая) на выходном звене механизма. У равномерных механизмов  . Равномерными являются зубчатые, винтовые, фрикционные и некоторые другие механизмы.
. Равномерными являются зубчатые, винтовые, фрикционные и некоторые другие механизмы.
5.3. Реверсивность механизма – свойство изменять направление движения на выходном звене при неизменном направлении движения входного звена. Достигается это либо переключением специально вводимых в сложный механизм реверсивных устройств ([3, стр.74]), либо без переключения, так как это свойство органически присуще данному механизму (например, кривошипному или кулачковому). В переключаемых реверсивных механизмах различают два состояния и соответствующие им два передаточных отношения или хода iP1, iP2 или SP1, SP2, которые обычно одинаковы и постоянны по величине, но отличаются друг от друга знаком. В большинстве шарнирно-рычажных и кулачковых реверсивных механизмах передаточное отношение обычно переменное по знаку и величине.
|
|
|
5.4. Обратимость механизма. Это свойство механизма позволяет передавать движение в обоих направлениях (от звена 1 к звену n и, при необходимости, от звена n к звену 1). Такая особенность механизмов объясняется, в основном, трением в кинематических парах. В необратимых механизмах в результате самоторможения в одной или в нескольких парах движение возможно только в одном направлении. Самотормозящими и, следовательно, необратимыми могут быть винтовые, кулачковые, некоторые зубчатые (например, червячные) и другие передачи скольжения. Напротив, передачи качения являются, как правило несамотормозящими (обратимыми), так как в зацепление между витками (зубцами) звеньев вводят тела качения (шарики или ролики) и коэффициент трения очень мал. Например, в передаче «винт-гайка качения» небольшой нажим (от руки) на гайку вдоль ее оси приводит винт во вращение. Для обратимых механизмов имеет место равенство i1n=1/in1 , то есть передаточное отношение (и ход) в механизме от звена 1 к звену n обратно передаточному отношению in1 (ходу) от звена n к звену 1. Если хотя бы одна кинематическая пара в механизме самотормозящая, то механизм в целом необратимый.
|
|
|
5.5. Регулируемость механизма. Данное свойство определяется возможностью существенного изменения (или небольшой корректировки) какого-либо параметра движения в механизме. Изменяемыми параметрами движения могут быть: длина хода (угловой или линейный путь), скорость (угловая или линейная), направление движения и исходное положение одного из звеньев механизма. Регулировки в механизмах достигаются переключением коробок скоростей и подач, изменением относительного положения или длины одного из звеньев или заменой звеньев (сменных кулачков или шестерен и т.д.), а также введением в механизм специальных корректирующих устройств (см. [3, стр.66,67]).
В общем случае регулируемость механизма по параметру xj на выходном звене характеризуется диапазоном DX регулирования, DX=xmax / xmin , где xmax , xmin – максимальное и минимальное значения регулируемого параметра. В качестве параметра xj обычно выбирают линейную или угловую скорость, угловую частоту (в оборотах в минуту или в двойных ходах в мин), путь (угловой или линейный) и другие характеристики.
|
|
|
ПРИМЕРЫ АНАЛИЗА МЕХАНИЗМОВ
Дата добавления: 2021-04-24; просмотров: 73; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!