Система автоматического управления скоростью автомобиля в зависимости от сопротивления движению
Основным недостатком известной и широко применяемой на автомобилях замкнутой автоматической системы управления скоростью автомобиля является ее недостаточное быстродействие, что в условиях эксплуатации отражается на уровне таких эксплуатационных свойств как проходимость и производительность.
Объясняется это тем, что при увеличении момента сопротивления движению автомобиля, а, следовательно, и приведенного момента к валу двигателя внутреннего сгорания (рисунок 4.16 [5]) происходит снижение угловой скорости вала двигателя внутреннего сгорания в соответствии с дифференциальным уравнением 1-го порядка:
 (4.1)
(4.1)
где Iпр – приведенный к валу двигателя внутреннего сгорания момент инерции всех движущихся и вращающихся масс автомобиля;
 – производная от угловой скорости вала двигателя внутреннего сгорания;
– производная от угловой скорости вала двигателя внутреннего сгорания;
Мд – вращающий момент двигателя внутреннего сгорания;
Мпс – приведенный к валу двигателя внутреннего сгорания момент сопротивления движению автомобиля.
На рисунке 4.17 приведен график снижения угловой скорости вращения вала двигателя внутреннего сгорания, которое происходит за достаточно длительное время ∆t1 по апериодической кривой первого порядка. В процессе этого снижения угловой скорости вала двигателя системой автоматического управления увеличивается подача топлива hди за такое же время ∆t1 (рисунок 4.18), в течение которого происходит и увеличение вращающего момента двигателя внутреннего сгорания до нового уровня приведенного к валу двигателя момента сопротивления Мпс. Таким образом, из-за большого времени ∆t1 возникает необходимость в снижении этого времени задержки в подаче топлива в системе автоматики.
|
|
|
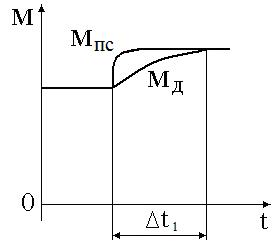
Рисунок 4.16 – Зависимость изменения моментов во времени при увеличении сопротивления движению автомобиля в известной системе управления

Рисунок 4.17 – Изменение частоты вращения двигателя внутреннего сгорания во времени при возрастании момента сопротивления движению автомобиля в известной системе управления
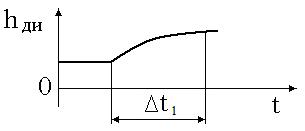
Рисунок 4.18 – Зависимость увеличения количества подаваемого топлива при возрастании момента сопротивления движению автомобиля в известной системе управления
Это особенно проявляется при увеличении момента сопротивления, когда из-за низкого быстродействия применяемой системы автоматического управления, снижение частоты вращения вала двигателя происходит по апериодической кривой первого порядка, то есть с большой задержкой во времени. В результате чего подача топлива также возрастает медленно. Следовательно, и вращающий момент двигателя увеличивается медленно до уровня нового, приведенного к валу двигателя момента сопротивления. Проходимость и производительность снижаются. Это происходит из-за конструктивных особенностей применяемой на автомобилях системы автоматического управления с использованием датчика частоты вращения вала двигателя [5].
|
|
|
Для повышения быстродействия системы управления авторами предлагается использовать такой информационный параметр, как приведенный к валу двигателя момент сопротивления движению, величина которого может измеряться датчиком момента [4]. В зависимости от значения этого момента и формируются управляющие сигналы на изменение скорости движения.
Система управления содержит (рисунок 4.19) последовательно кинематически соединенные двигатель 10 внутреннего сгорания с педалью 1 управления подачей топлива, коробку 47 передач, главную передачу 48, ведущее колесо 46, сумматор 13 с двумя входами 11 и 14 и выходом 12, датчик 2 перемещения педали управления подачей топлива, выход 3 которого соединен с первым входом 11 сумматора 13; датчик 4 крутящего момента, установленный на упругом валу 31, соединяющем двигатель внутреннего сгорания с коробкой передач; последовательно соединенные усилитель 15 и электронный блок 22 управления; исполнительный элемент, выполненный в виде электромагнитной форсунки 32, ввернутой в камеру сгорания двигателя внутреннего сгорания, с обмоткой 33, соединенной с выходом электронного блока 22 управления; инвертор 23, выполненный на транзисторном усилителе 25 и резисторе 24 по схеме с общим эмиттером. При этом вход транзиторного усилителя 25 соединен с выходом датчика 4 крутящего момента, выход транзисторного усилителя 25 соединен со вторым входом 14 сумматора 13, а выход 12 сумматора 13 соединен с усилителем 15, образуя при этом соединении отрицательную жесткую обратную связь по моменту.
|
|
|
Датчик 4 крутящего момента состоит из установленных по концам упругого вала 31 двигателя внутреннего сгорания металлических дисков 21, 42 с радиальными прорезями и выступами; преобразователей 20, 41 импульсных, установленных с обеспечением возможности прохождения выступов и прорезей каждого из дисков 21, 42 возле соответствующего преобразователя 20, 41; дифференцирующих цепей 9, 40 с отсекающими диодами 8, 29, соединенных с выходами преобразователей 20, 41; триггера 19, выполненного на первом 18 и втором 28 транзисторах и четырех резисторах 16, 17, 26, 27, при этом базы транзисторов 18, 28 соединены с выходами дифференцирующих цепей 9, 40; последовательно соединенных эмиттерного повторителя 34, выполненного на транзисторе 35 и резисторе 37, входом соединенного с выходом триггера 19; интегрирующей цепи 43, выполненной на резисторе 36 и конденсаторе 44, выходного резистора 45.
|
|
|
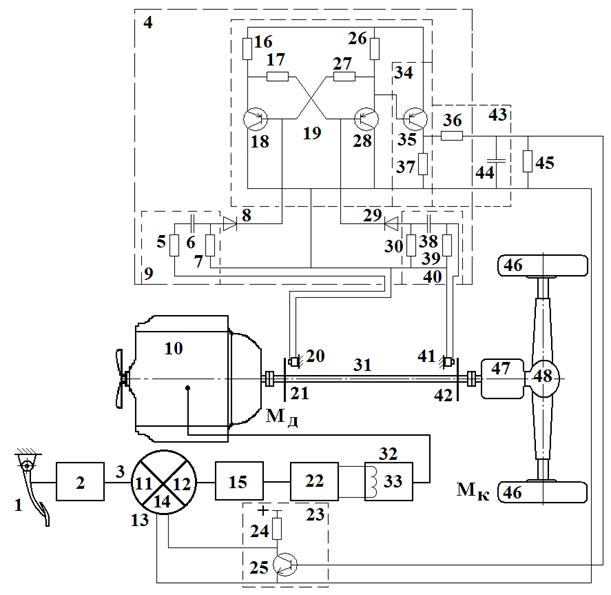
Рисунок 4.19 – Функциональная схема усовершенствованной автоматической системы управления скоростью движения автомобиля по моменту сопротивления движению:
Дифференцирующая цепь 9 включает в себя резисторы 5, 7 и конденсатор 6. Дифференцирующая цепь 40 включает в себя резисторы 30, 39 и конденсатор 38.
Крутящий момент на упругом валу 31 двигателя внутреннего сгорания измеряется следующим образом. В исходном состоянии транзистор 18 триггера 19 закрыт, а транзистор 28 открыт. Поэтому напряжение на коллекторе транзистора 28 равно нулю, а на коллекторе транзистора 18 принимает максимальное значение. При вращении вала 31 и нагружении его моментом диск 21 проходит выступом возле преобразователя 20 и на его выходе появляется первый импульс. Он дифференцируется цепью 9, на выходе которой образуются два разнополярных импульса. Выходной сигнал цепи 9 выпрямляется диодом 8, образуя положительный импульс, который подается на базу транзистора 18. Транзистор 18 открывается, а транзистор 28 закрывается, поэтому на коллекторе транзистора 28 появляется положительное напряжение.
При нагружении моментом упругий вал 31 закручивается на угол, пропорционально приложенному моменту. Поэтому диск 42 поворачивается относительно диска 21 и на выходе преобразователя 41 формируется импульс, имеющий фазовое смещение относительно первого импульса, сформированного преобразователем 20, он дифференцируется цепью 40, на выходе которой появляются два разнополярных импульса напряжения. Далее полученное напряжение выпрямляется диодом 29, образуя после диода положительный импульс, который подается на базу транзистора 28. Транзистор 28 открывается, а транзистор 18 закрывается. В результате происходит формирование на коллекторе транзистора 28 прямоугольного импульса, длительность которого пропорциональна величине крутящего момента в данный момент времени. Далее формирование прямоугольных импульсов (рисунок 4.20) на выходе триггера 19 происходит аналогично описанному выше.

Рисунок 4.20 – Напряжение на выходе транзистора 28 триггера 19
Полученные прямоугольные импульсы подаются на вход интегрирующей цепи 43 посредством эмиттерного повторителя 34, с помощью которого выполняется согласование высокого сопротивления на выходе триггера 19 с низким сопротивлением интегрирующей цепи 43. На выходе интегрирующей цепи 43 и на выходном резисторе 45 формируется напряжение (рисунок 4.21), уровень которого пропорционален крутящему моменту на валу двигателя 1 внутреннего сгорания.
С помощью датчика 4 крутящего момента, установленного на упругом валу 31, измеряется крутящий момент. А с помощью сумматора 13 непрерывно происходит операция вычитания напряжения с выхода датчика 2 перемещения педали из напряжения, подаваемого посредством транзисторного усилителя 25 на вход 14 сумматора 13. На выходе сумматора формируется управляющее напряжение рассогласования в виде разности этих напряжений.

Рисунок 4.21 – Напряжение на выходе датчика момента
При равенстве напряжения с выхода датчика 2 перемещения педали, подаваемого на вход 11 сумматора и напряжения с выхода транзисторного усилителя 25 на вход 14 сумматора, напряжение на выходе 12 сумматора равно нулю. Автомобиль при этом движется с постоянной скоростью, соответствующей частоте вращения двигателя nд (рисунок 4.22 прямая 1), так как прямоугольные импульсы напряжения, формируемые электронным блоком управления и подаваемые на обмотку 33 электромагнитной форсунки 32 имеют одинаковую длительность и этим обеспечивается постоянная по величине подача топлива hд (рисунок 4.23, прямая 1) в цилиндры двигателя. При этом вращающий момент Мд двигателя равен приведенному к валу двигателя моменту Мпс сопротивления (рисунок 4.24, прямая 1).
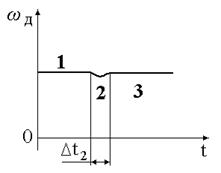
Рисунок 4.22 – Изменение угловой скорости вала двигателя при возрастании момента сопротивления движению автомобиля в предлагаемой системе управления
При увеличении момента Мк (рисунок 4.16) сопротивления движению автомобиля от внешних факторов, а, следовательно, и увеличении приведенного момента сопротивления Мпс (рисунок 4.24, кривая 2) на упругом валу 31 по отношению к вращающему моменту двигателя 10, на выходе датчика момента увеличивается напряжение. Оно прикладывается к входу транзиторного усилителя 25 инвертора 23. Поэтому на выходе транзисторного усилителя напряжение снижается, оно подается на вход 14 сумматора и вычитается из напряжения, подаваемого на вход 11 сумматора. На выходе сумматора появляется положительное напряжение, равное разности подаваемых на входы 11 и 14 напряжений, которое подается на усилитель 15.

Рисунок 4.23 – Зависимость увеличения количества подаваемого топлива во времени при возрастании момента сопротивления движению автомобиля в предлагаемой системе управления
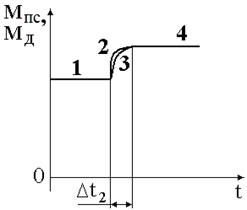
Рисунок 4.24 – Зависимость изменения моментов во времени при увеличении сопротивления движению автомобиля в предлагаемой системе управления
На выходе электронного блока управления 22 увеличится длительность формируемого им прямоугольного импульса, подача топлива hд (рисунок 4.23, кривая 2) увеличивается за время ∆t2, значительно меньшее, чем в известной системе управления автомобилем. По истечении этого времени вращающий момент Мд двигателя возрастает (рисунок 4.24, кривая 3) и становится равным новому увеличенному моменту сопротивления (рисунок 4.24, прямая 4). Угловая скорость вращения вала двигателя практически не снижается (рисунок 4.22, кривая 2) и далее становится постоянной (рисунок 4.22, прямая 3).
Таким образом, за счет оперативного практически без замедления увеличения вращающего момента двигателя при увеличении приведенного к его валу момента сопротивления движению автомобиля с применением отрицательной жесткой обратной связи, содержащей инвертор, повышается проходимость и производительность автомобиля с предлагаемой системой управления.
Экономический эффект получается за счет повышения производительности и проходимости автомобиля путем увеличения быстродействия системы управления за счет использования для управления двигателем внутреннего сгорания такого информационного параметра как приведенный момент сопротивления к валу двигателя.
Дата добавления: 2021-04-15; просмотров: 93; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!