Устройство управления скоростью движения
Повышение проходимости транспортных средств
Устройство повышения проходимости
Применяемые системы автоматического управления скоростью движения грузовых автомобилей отличаются тем, что обеспечивают достаточный уровень таких эксплуатационных свойств, как проходимость и производительность, только при постоянном нагрузочном режиме эксплуатации. В то же время момент сопротивления движению автомобиля Мк является динамическим, а уровень проходимости и производительности при переменных режимах эксплуатации, как наиболее нагруженных, снижается из-за недостаточного быстродействия существующей системы автоматического управления скоростью движения.
Объясняется это тем, что при увеличении момента сопротивления движению на ведущих колесах транспортного средства в процессе его эксплуатации увеличивается и приведенный момент сопротивления на валу двигателя внутреннего сгорания по отношению к вращающему моменту двигателя внутреннего сгорания, вследствие чего снижается его частота вращения. Известно, что снижение частоты вращения n дн двигателя происходит по апериодической кривой первого порядка, т. е. с задержкой во времени, равной ∆t1 (рисунок 4.1).
В процессе снижения частоты вращения увеличивается количество подаваемого топлива h дн в цилиндры двигателя, но из-за медленного снижения частоты вращения двигателя это происходит за время, также равное ∆t1 (рисунок 4.2), т. е. медленно. Поэтому вращающий момент на валу двигателя возрастает медленно. Транспортное средство очень медленно преодолевает возросшее сопротивление движению, при этом снижаются его производительность и проходимость. Возникает необходимость в совершенствовании известной системы автоматического регулирования путем увеличения ее быстродействия.
|
|
|
|
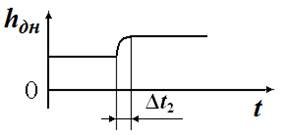
Рисунок 4.1 – Увеличение количества подаваемого топлива при возрастании момента сопротивления движению в традиционных системах управления
|
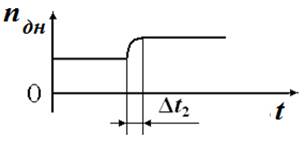
Рисунок 4.2 – Снижение частоты вращения двигателя при возрастании момента сопротивления движению транспортного средства в известных системах управления
В результате выполнения научно-исследовательских работ для решения данной задачи был разработан метод повышения проходимости и производительности транспортного средства за счет увеличения быстродействия системы автоматического управления двигателем внутреннего сгорания при увеличении момента сопротивления движению и предложена система автоматического управления для его реализации.
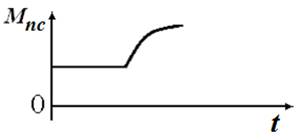
Сущность метода заключается в том, что приведенный момент Мпс сопротивления на валу двигателя непрерывно измеряют в процессе эксплуатации автомобиля (рисунок 4.3), производят его дифференцирование и при его увеличении получают его производную dМпс/dt cо знаком плюс на выходе дифференцирующей цепи (рисунок 4.4) с помощью диода, включенного в прямом направлении. Далее подают эту производную приведенного момента сопротивления положительной гибкой обратной связью на дополнительный вход системы автоматического управления автомобилем, таким образом получая управляющий сигнал, который подается на усилитель.
|
|
|
При наличии напряжения на выходе усилителя электронным блоком управления формируется напряжение в виде прямоугольного импульса с большей длительностью, чем ранее до увеличения момента сопротивления движению транспортного средства. Поэтому с помощью форсунки подается больше топлива h дн (рисунок 4.5), и это происходит быстрее за счет введения в систему управления гибкой положительной обратной связи, т. к. задержка во времени в установке нового значения подачи топлива, равная ∆t2, в предлагаемой системе управления значительно меньше, чем в известной системе управления.
|
|
|
|
|
Рисунок 4.3 – Увеличение приведенного к валу двигателя момента Мпс сопротивления валу двигателя при увеличении момента сопротивления движению транспортного средства
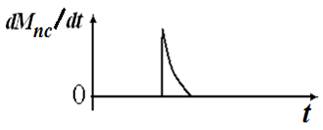
Рисунок 4.4 – Импульс напряжения на выходе дифференцирующей цепи
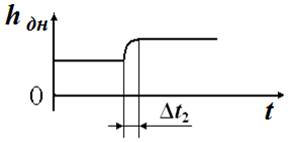
Рисунок 4.5 – Увеличение количества подаваемого топлива h дн при возрастании момента сопротивления движению транспортного средства в предлагаемой системе управления
Момент, развиваемый двигателем, возрастает быстрее и становится равным увеличенному приведенному к валу двигателя внутреннего сгорания моменту сопротивления более быстро, а частота вращения n дн двигателя внутреннего сгорания, а следовательно, и частота вращения ведущего колеса претерпевают незначительное снижение (рисунок 4.6).
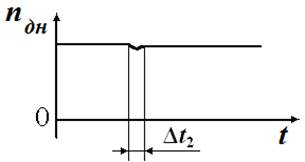
Рисунок 4.6 – Изменение частоты вращения n дн двигателя при возрастании момента сопротивления движению транспортного средства в предлагаемой системе управления
Система автоматического управления содержит (рисунок 4.7) последовательно кинематически соединенные двигатель 1 внутреннего сгорания с педалью 2 управления подачей топлива, коробкой 3 передач, главную передачу 4, ведущее колесо 5, первый сумматор 6 с двумя входами 7 и 8 и выходом 9, датчик 10 перемещения педали 2 управления подачей топлива, выход 11 которого соединен с первым входом 7 первого сумматора 6, датчик 12 частоты вращения двигателя 1 внутреннего сгорания, выход которого соединен со вторым входом 8 первого сумматора 6, образуя при этом соединении жесткую обратную отрицательную связь 13, датчик 14 крутящего момента, установленный на упругом валу 15, соединяющим двигатель 1 внутреннего сгорания с коробкой 3 передач, последовательно соединенные усилитель 16 и электронный блок 17 управления, исполнительный элемент, выполненный в виде электромагнитной форсунки 18, ввернутой в камеру сгорания двигателя 1 внутреннего сгорания, с обмоткой 19, соединенной с выходом электронного блока 17 управления, второй сумматор 20 с двумя входами 21 и 22 и выходом 23, первый вход 21 которого соединен с выходом 9 первого сумматора 6, а выход 23 второго сумматора 20 – с усилителем 16, дифференцирующую цепь 24, включающую в себя конденсатор 25 и резистор 26, последовательно соединенный с дифференцирующей цепью 24, диод 27, включенный в прямом направлении, при этом выход датчика 14 крутящего момента соединен со входом дифференцирующей цепи 24, а выход дифференцирующей цепи 24 с диодом 27, включенном в прямом направлении, – со вторым входом 22 второго сумматора 20, образуя при этом соединении гибкую обратную положительную связь 28.
|
|
|
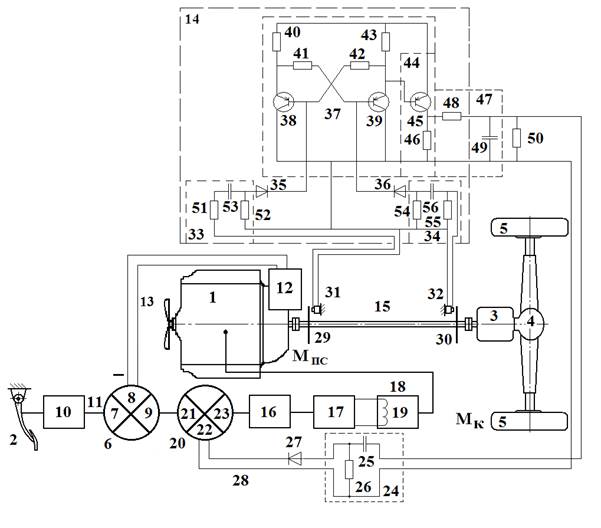
Рисунок 4.7 – Схема системы управления
Датчик 14 крутящего момента включает в себя установленные по концам упругого вала 15 двигателя 1 металлические диски 29, 30 с радиальными прорезями и выступами, преобразователи 31, 32 импульсные, установленные с обеспечением возможности прохождения выступов и прорезей каждого из дисков 29, 30 возле соответствующего преобразователя 31, 32, соединенные с выходами преобразователей 31, 32 дифференцирующие цепи 33, 34 с отсекающими диодами 35, 36, триггер 37, выполненный на первом 38 и втором 39 транзисторах и четырех резисторах 40, 41, 42, 43 (при этом базы транзисторов 38, 39 соединены с выходами дифференцирующих цепей 33, 34), последовательно соединенные эмиттерный повторитель 44, выполненный на транзисторе 45 и резисторе 46, входом соединенный с выходом триггера 37, интегрирующую цепь 47, выполненную на резисторе 48 и конденсаторе 49, выходной резистор 50.
Дифференцирующая цепь 33 включает в себя резисторы 51, 52 и конденсатор 53. Дифференцирующая цепь 34 включает в себя резисторы 54, 55 и конденсатор 56.
Крутящий момент на валу двигателя 1 измеряется следующим образом. В исходном состоянии транзистор 38 триггера 37 закрыт, а транзистор 39 открыт. Поэтому напряжение на коллекторе транзистора 39 равно нулю, а на коллекторе транзистора 38 принимает максимальное значение. При вращении вала 15 и нагружении его моментом диск 29 проходит выступом возле преобразователя 31, и на выходе преобразователя 31 появляется первый импульс. Он дифференцируется цепью 33, на выходе которой образуются два разнополярных импульса. Выходной сигнал цепи 33 выпрямляется диодом 35, образуя положительный импульс, который подается на базу транзистора 38. Транзистор 38 открывается, а транзистор 39 закрывается, поэтому на коллекторе транзистора 39 появляется положительное напряжение.
При нагружении моментом вал 15 закручивается на угол пропорционально приложенному моменту. Поэтому диск 30 закручивается относительно диска 29 и на выходе преобразователя 32 образуется импульс, имеющий фазовое смещение относительно первого импульса, сформированного преобразователем 31.
Этот импульс дифференцируется цепью 34, выходной сигнал цепи 34 выпрямляется диодом 36, образуя положительный импульс, который подается на базу транзистора 39. Транзистор 39 открывается, а транзистор 38 закрывается. На коллекторе транзистора 39 опять устанавливается напряжение, равное нулю. В результате происходит формирование на коллекторе второго транзистора 39 прямоугольного импульса, длительность которого пропорциональна величине крутящего момента в данный момент времени. Далее образование прямоугольных импульсов на выходе второго транзистора 39 происходит аналогично описанному выше. Полученные прямоугольные импульсы подаются на вход интегрирующей цепи 47 посредством эмиттерного повторителя 44, с помощью которого выполняется согласование высокого сопротивления на выходе триггера 37 с низким сопротивлением интегрирующей цепи 47. На выходе интегрирующей цепи 47 и на выходном резисторе 50 формируется напряжение, уровень которого пропорционален крутящему моменту на валу двигателя 1.
При движении транспортного средства с помощью датчика 10 перемещения педали управления подачей топлива задается скоростной режим двигателя 1, с помощью датчика 12 частоты вращения двигателя измеряется его частота вращения. При сравнении напряжений на выходе датчика 10 и датчика 12 первым сумматором 6 формируется управляющее напряжение на его выходе в виде разности этих напряжений.
При равенстве напряжения с выхода датчика 10 перемещения педали и напряжения с выхода датчика 12 частоты вращения двигателя, подаваемых на входы 7 и 8 первого сумматора 6, напряжение на выходе 9 первого сумматора 6 равно нулю, транспортное средство при этом движется с постоянной скоростью, т. к. прямоугольные импульсы напряжения, формируемые электронным блоком 17 управления и подаваемые на обмотку 19 электромагнитной форсунки 18, имеют одинаковую длительность, и этим обеспечивается постоянная по величине подача топлива в цилиндры двигателя.
При увеличении момента Мк сопротивления движению транспортного средства от внешней среды, а следовательно, и увеличении приведенного момента сопротивления на упругом валу 15 по отношению к вращающему моменту двигателя частота вращения двигателя внутреннего сгорания начинает снижаться. На выходе датчика 12 частоты вращения двигателя 1 внутреннего сгорания начинает уменьшаться напряжение, а на выходе 9 первого сумматора 6 появляется напряжение.
Одновременно на выходе датчика момента, установленного на валу двигателя внутреннего сгорания, напряжение увеличивается, оно дифференцируется цепью 24, вследствие чего на ее выходе формируется положительное напряжение, пропорциональное производной от увеличения момента сопротивления на валу двигателя внутреннего сгорания.
Посредством диода 27, включенного в прямом направлении, полученное положительное напряжение подается на второй вход 22 второго сумматора 20 по цепи обратной положительной гибкой связи 28, содержащей дифференцирующую цепь 24 и диод 27. Далее производится сложение его с выходным напряжением первого сумматора 6. Результат в виде положительного напряжения с выхода 23 второго сумматора 20 подается на усилитель 16.
На выходе электронного блока 17 управления увеличится длительность формируемого им прямоугольного импульса, подача топлива h дн (см. рисунок 4.5) повысится, момент двигателя возрастет и станет равным новому увеличенному моменту сопротивления, а частота вращения двигателя прекратит снижаться. За счет оперативного, почти без замедления, увеличения вращающего момента двигателя по цепи положительной гибкой обратной связи 28 повышаются проходимость и производительность транспортного средства с предлагаемой системой управления.
При уменьшении момента сопротивления движению транспортного средства, а следовательно, и уменьшении приведенного момента сопротивления на упругом валу 15 по отношению к вращающему моменту двигателя внутреннего сгорания на выходе датчика 14 момента напряжение снижается, оно дифференцируется цепью 24, на ее выходе формируется отрицательное напряжение, пропорциональное производной от снижения момента сопротивления упругом валу 15.
Однако посредством диода 27, включенного в прямом направлении, полученное отрицательное напряжение не подается на второй вход 22 второго сумматора 20. Поэтому коррекции подаваемого количества топлива не происходит.
Экономический эффект получается за счет повышения производительности и проходимости транспортного средства путем использования для управления двигателем внутреннего сгорания такого информационного параметра, как производная от увеличения момента сопротивления на валу двигателя при повышении момента сопротивления движению транспортного средства.
Устройство управления скоростью движения
Используемые системы автоматического управления скоростью движения автомобиля включают в себя, как правило, датчик перемещения 2 (рисунок 4.8), педали управления подачей топлива 1, сумматор 4, первым входом 3 соединенный с выходом датчика перемещения педали управления подачей топлива, датчик частоты вращения 12 двигателя внутреннего сгорания 9, выход 11 которого соединен обратной отрицательной жесткой связью 5 со вторым входом 6 сумматора, а выход 7 сумматора с последовательно соединенными усилителем 8, электронным блоком управления 10, электромагнитной форсункой 14, ввернутой в камеру сгорания двигателя внутреннего сгорания, c обмоткой 13, соединенной с выходом электронного блока управления.
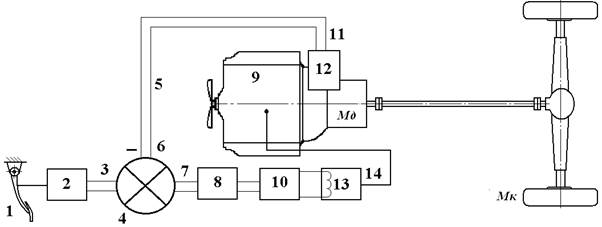
Рисунок 4.8 – Схема системы управления скоростью движения автомобиля
Эти системы отличаются тем, что обеспечивают требуемый уровень таких эксплуатационных свойств, как проходимость и производительность, только при постоянном нагрузочном режиме эксплуатации автомобиля. В то же время момент сопротивления движению автомобиля Мк является динамическим, и уровень проходимости и производительности при переменных режимах эксплуатации автомобиля, как наиболее нагруженных, снижается из-за недостаточного быстродействия существующей системы автоматического управления скоростью движения автомобиля.
При постоянном скоростном режиме работы автомобиля на выходе датчика 2 перемещения педали управления подачей топлива формируется напряжение U1, пропорциональное перемещению педали управления подачей топлива и поступающее на первый вход сумматора 4, а на выходе датчика частоты вращения 12 двигателя внутреннего сгорания – напряжение, пропорциональное частоте вращения двигателя внутреннего сгорания, поступающее на второй вход сумматора U2. При постоянном скоростном режиме работы автомобиля указанные напряжения равны между собой, а т. к. сумматор непрерывно производит операцию вычитания напряжения, поступающего на его второй вход, из напряжения, поступающего на его первый вход, то на выходе сумматора появляется управляющее напряжение, равное разности указанных напряжений  U. Поэтому при постоянном скоростном режиме работы автомобиля управляющее напряжение на выходе сумматора и входное напряжение, поступающее на усилитель, равны нулю. Электронным блоком управления формируются прямоугольные импульсы постоянной длительности, и количество топлива подается в цилиндры двигателя одинаковым.
U. Поэтому при постоянном скоростном режиме работы автомобиля управляющее напряжение на выходе сумматора и входное напряжение, поступающее на усилитель, равны нулю. Электронным блоком управления формируются прямоугольные импульсы постоянной длительности, и количество топлива подается в цилиндры двигателя одинаковым.
При увеличении момента Мк сопротивления движению автомобиля увеличивается и момент Мд сопротивления на валу двигателя внутреннего сгорания по отношению к имеющемуся на валу двигателя вращающему моменту, вследствие чего происходит снижение частоты вращения двигателя. Известно, что снижение частоты вращения n дн двигателя происходит по апериодической кривой первого порядка, т. е. с задержкой во времени, равной t1 (рисунок 4.9).
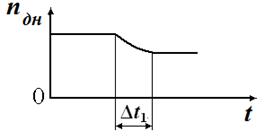
Рисунок 4.9 – Изменение частоты вращения вала двигателя внутреннего сгорания во времени при возрастании момента сопротивления движению автомобиля в используемой системе управления
В процессе снижения частоты вращения вала двигателя происходит увеличение количества подаваемого топлива h дн в его цилиндры. Но это из-за медленного снижения частоты вращения происходит за такое же время t1 (рисунок 4.10), т. е. медленно. В процессе снижения частоты вращения двигателя происходит уменьшение напряжения U2 на выходе датчика частоты вращения, поступающего на второй вход сумматора по цепи отрицательной жесткой обратной связи. На выходе сумматора появляется управляющее напряжение, равное разности поступающих напряжений на входы сумматора, которое передается посредством усилителя на вход электронного блока управления.
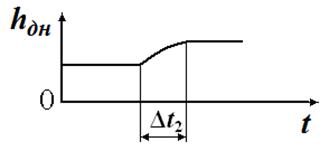
Рисунок 4.10 – Зависимость увеличения количества подаваемого топлива при возрастании момента сопротивления движению автомобиля в используемой системе управления
На выходе блока управления появляются прямоугольные импульсы с увеличенной длительностью. Топлива подается больше, и вращающий момент на валу двигателя внутреннего сгорания возрастает. Но так как при увеличении момента сопротивления движению автомобиля частота вращения двигателя снижается медленно, то и увеличение вращающего момента двигателя происходит с задержкой во времени, что снижает быстродействие системы. Автомобиль медленно преодолевает сопротивление движению, при этом ухудшаются его производительность и проходимость. Может даже возникать необходимость в переключении передачи на более низшую по отношению к исходной, что дополнительно снижает быстродействие.
Таким образом, требуется совершенствование системы автоматического регулирования путем повышения ее быстродействия.
В результате проведенных теоретических и экспериментальных исследований с существующими автомобильными системами управления авторами разработана усовершенствованная система. В ней при увеличении момента сопротивления движению автомобиля производится дифференцирование (рисунок 4.11) снижающейся частоты вращения двигателя и результат дифференцирования (рисунок 4.12) подается посредством диода, включенного в обратном направлении, на второй вход второго сумматора, а первый вход второго сумматора соединен с выходом первого сумматора, при этом выход второго сумматора соединен со входом усилителя. Таким образом, в систему управления скоростью движения автомобиля необходимо ввести вторую гибкую отрицательную связь, повышающую быстродействие системы управления при увеличении момента сопротивления движению автомобиля.
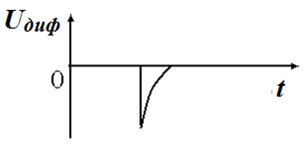
Рисунок 4.11 – Напряжение на выходе дифференцирующей цепи в усовершенствованной системе при увеличении момента сопротивления движению автомобиля
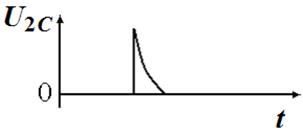
Рисунок 4.12 – Напряжение на выходе второго сумматора в усовершенствованной системе управления при увеличении момента сопротивления движению автомобиля
Электронным блоком управления формируется напряжение в виде прямоугольных импульсов с большей длительностью, чем ранее до увеличения момента сопротивления движению автомобиля. Поэтому с помощью форсунки подается больше топлива h дн (рисунок 4.13), и это происходит быстрее за счет введения в систему управления гибкой отрицательной обратной связи. Это приводит к уменьшению задержки во времени в установке нового значения подачи топлива, равной t2 в усовершенствованной системе управления, в сравнении со временем в известной системе управления, равной t1. Изменение частоты вращения вала при этом (рисунок 4.14) незначительно.
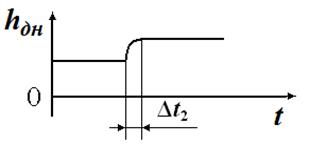
Рисунок 4.13 – Процесс быстрого увеличения количества подаваемого топлива при возрастании момента сопротивления движению автомобиля в усовершенствованной системе управления
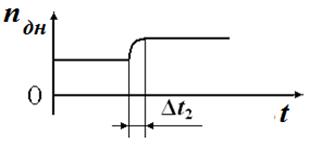
Рисунок 4.14 – Изменение частоты вращения вала двигателя внутреннего сгорания во времени при возрастании момента сопротивления движению автомобиля в усовершенствованной системе управления
Усовершенствованная система содержит (рисунок 4.15) последовательно кинематически соединенные двигатель внутреннего сгорания 4 с педалью управления подачей топлива 2, коробку передач 32, главную передачу 49, ведущее колесо 48, первый сумматор 5 с первым 7 и вторым 8 входами и выходом 9, датчик 1 перемещения педали 2 управления подачей топлива, выход 6 которого соединен с первым входом 7 первого сумматора 5, датчик 47 частоты вращения двигателя внутреннего сгорания 4, выход которого соединен со вторым 8 входом первого сумматора 5, образуя при этом соединении жесткую обратную отрицательную связь 3, последовательно соединенные усилитель 33, электронный блок управления 34, электромагнитную форсунку 36, ввернутую в камеру сгорания двигателя внутреннего сгорания 4, с обмоткой 35, соединенной с выходом электронного блока управления 34, второй сумматор 10 с первым входом 11, соединенным с выходом 9 первого сумматора 5, и выходом 12, соединенным с усилителем 33, первую дифференцирующую цепь 41, включающую в себя резистор 40 и конденсатор 38, и последовательно соединенный с ней диод 37, включенный в обратном направлении.
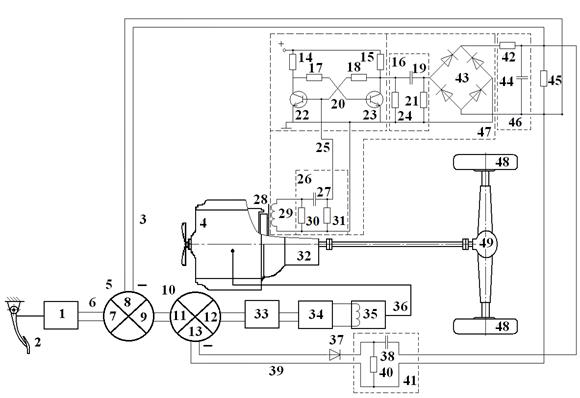
Рисунок 4.15 – Функциональная схема усовершенствованной системы управления скоростью движения автомобиля
Выход датчика 47 частоты вращения дополнительно соединен со входом первой дифференцирующей цепи 21, а выход первой дифференцирующей цепи 41 с диодом 37, включенным в обратном направлении, – со вторым входом 13 второго сумматора 10, образуя при этом соединении гибкую обратную отрицательную связь 39.
Датчик 47 частоты вращения двигателя внутреннего сгорания содержит металлический диск 28 с выступами и прорезями, установленный на валу двигателя внутреннего сгорания, катушку 29 индуктивности с магнитным сердечником, установленную возле металлического диска 28, последовательно соединенные вторую дифференцирующую цепь 26, выполненную на резисторах 30, 31 и конденсаторе 27, триггер 20 с одним входом 25, выполненный на первом 22 и втором 23 транзисторах и четырех резисторах 14, 17, 18, 15, третью дифференцирующую цепь 16, выполненную на двух резисторах 24, 21 и конденсаторе 19, выпрямитель 43, интегрирующую цепь 46, выполненную на резисторе 42 и конденсаторе 44, выходной резистор 45.
Датчик 47 частоты вращения двигателя работает следующим образом. При работе двигателя выступы и прорези металлического диска 28 проходят возле катушки индуктивности 29 с магнитным сердечником, на выходе которой возникает разнополярная периодическая последовательность импульсов, которая формируется второй дифференцирующей цепью 26 и подается входом 25 на базу транзистора 22 триггера 20.
На выходе триггера 20 образуются положительные прямоугольные импульсы различной длительности при изменении частоты вращения двигателя внутреннего сгорания. Для формирования одинаковых импульсов при различной частоте вращения двигателя внутреннего сгорания с выхода триггера последовательность импульсов подается на третью дифференцирующую цепь 16, на выходе которой образуются экспоненциальные разнополярные одинаковые по площади импульсы. Они выпрямляются выпрямителем 43 и сглаживаются интегрирующей цепью 46.
На выходе резистора 49 формируется уровень напряжения, пропорциональный частоте вращения двигателя внутреннего сгорания.
При эксплуатации автомобиля с помощью датчика 1 перемещения педали управления подачей топлива задается скоростной режим двигателя внутреннего сгорания, а с помощью датчика 47 измеряется его частота вращения. Так как обратная связь отрицательная, то непрерывно с помощью сумматора 5 происходит вычитание напряжения на выходе датчика 47 из напряжения на выходе датчика 1 и на выходе 9 сумматора 5 формируется управляющее напряжение в виде разности указанных напряжений.
При равенстве напряжения с выхода датчика 1 перемещения педали и напряжения с выхода датчика 47 частоты вращения двигателя, подаваемых соответственно на входы 7 и 8 первого сумматора 5, напряжение на выходе 9 первого сумматора 5 и одновременно на первом входе 11 второго сумматора 10 равно нулю. А так как момент сопротивления движению автомобиля при постоянном скоростном режиме его работы не изменяется, то на выходе первой дифференцирующей цепи 41 и одновременно на втором входе 13 второго сумматора 10 напряжение также равно нулю. Поэтому на выходе 12 второго сумматора 10 и одновременно на входе электронного усилителя 33 управляющее напряжение отсутствует. Автомобиль при этом движется с постоянной скоростью, т. к. прямоугольные импульсы напряжения, формируемые электронным блоком управления 34 и подаваемые на обмотку 35 электромагнитной форсунки 36, имеют постоянную длительность, а этим обеспечивается одинаковая подача топлива в цилиндры двигателя внутреннего сгорания.
При увеличении момента сопротивления движению Мк автомобиля от внешней среды, а следовательно, и увеличении момента Мд сопротивления на валу двигателя внутреннего сгорания по отношению к вращающему моменту двигателя внутреннего сгорания частота вращения двигателя начинает снижаться.
На выходе датчика 47 частоты вращения двигателя внутреннего сгорания начинает уменьшаться напряжение. Оно дифференцируется первой дифференцирующей цепью 41.
На выходе дифференцирующей цепи 41 формируется отрицательное напряжение, пропорциональное производной от снижения частоты вращения двигателя внутреннего сгорания.
Посредством диода 37, включенного в обратном направлении, полученное отрицательное напряжение подается на второй вход 13 второго сумматора 10 по цепи обратной отрицательной гибкой связи 39, содержащей дифференцирующую цепь 41 и диод 37. Далее производится вычитание его из выходного напряжения первого сумматора 5, которое до увеличения момента сопротивления движению автомобиля равно нулю. Вычитание сумматором 10 из нуля отрицательного импульса напряжения, поступающего на второй вход 13 второго сумматора 10, дает результат в виде положительного импульса напряжения, которое подается на усилитель 33.
На выходе электронного блока управления 34 увеличивается длительность формируемого им прямоугольного импульса, и подача топлива быстро повышается. Вращающий момент на валу двигателя возрастает до тех пор, пока не станет равным новому, увеличенному приведенному к валу двигателя моменту сопротивления, а частота вращения вала двигателя внутреннего сгорания прекратит снижаться. За счет оперативного, почти без замедления, регулирования вращающего момента двигателя внутреннего сгорания по цепи отрицательной гибкой обратной связи 39 повышаются проходимость и производительность автомобиля с усовершенствованной системой управления.
При уменьшении момента сопротивления движению автомобиля от внешней среды, а следовательно, и уменьшении момента сопротивления на валу двигателя по отношению к вращающему моменту частота вращения двигателя начинает увеличиваться.
На выходе датчика 47 частоты вращения двигателя внутреннего сгорания начинает увеличиваться напряжение. Оно дифференцируется первой дифференцирующей цепью 41, на выходе которой формируется пропорциональное производной от увеличения частоты вращения двигателя внутреннего сгорания положительное напряжение, которое не подается на второй вход сумматора 10, и коррекции величины подаваемого топлива при снижении момента сопротивления движению автомобиля не происходит.
Экономический эффект достигается повышением производительности и проходимости автомобиля путем увеличения быстродействия за счет использования для управления двигателем внутреннего сгорания такого информационного параметра, как производная от снижения частоты вращения двигателя при повышении момента сопротивления движению автомобиля.
Дата добавления: 2021-04-15; просмотров: 195; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!