Устройство для бортового диагностирования тормозных систем автомобиля по замедлению
Безопасность автомобильного транспорта
Устройство для бортового диагностирования тормозных систем автомобиля по времени торможения
Тормозные свойства транспортных средств оказывают наибольшее влияние на безопасность движения. Кроме того, чем лучше тормозные свойства, тем выше их средняя скорость движения и производительность. Основными показателями тормозных свойств являются: замедление при торможении, время торможения и тормозной путь. Их нормативные значения для подвижного состава без нагрузки на сухой асфальтной дороге регламентируются «Правилами дорожного движения» и стандартами. Их измерение осуществляется в режиме экстренного торможения, когда тормозные силы на колесах достигают своего максимального (по условию сцепления) значения. [1].
Уравнение движения автомобиля с колесной формулой 4х2 или 4х4 при экстренном торможении записывается в виде
 , (2.1)
, (2.1)
где Ри – сила инерции, действующая на автомобиль Н;
 – тормозные силы соответственно на передних и задних колесах автомобиля, Н.
– тормозные силы соответственно на передних и задних колесах автомобиля, Н.
Поскольку при экстренном торможении тормозные силы прямо пропорциональны произведениям нормальных реакций на колесах (  ) на коэффициент сцепления колес с дорогой φсц, то уравнение движения можно переписать
) на коэффициент сцепления колес с дорогой φсц, то уравнение движения можно переписать
 , (2.2)
, (2.2)
где Ga – вес автомобиля, Н;
g – ускорение свободного падения, м/с2;
j з – замедление при торможении, м/с2.
Так как  , то можно записать
, то можно записать
 , (2.3)
, (2.3)
отсюда
 . (2.4)
. (2.4)
Для определения времени торможения можно использовать формулу 2.4, представив в ней замедление как производную скорости движения v по времени t:
 , (2.5)
, (2.5)
отсюда
 . (2.6)
. (2.6)
Проинтегрировав выражение 2.6, получают формулу для определения полного времени торможения:
 , (2.7)
, (2.7)
где v н, v к – соответственно начальная и конечная скорость автомобиля при торможении (м/с).
Тормозной путь, проходимый автомобилем за время полного торможения (когда замедление принимает максимальное значение), можно определить, используя выражение 2.6, учитывая, что v = dS/dt, откуда dt = dS/v. Таким образом,
 и
и  . (2.8)
. (2.8)
Проинтегрировав это уравнение, получают формулу для определения полного тормозного пути:
 . (2.9)
. (2.9)
Перечисленные параметры эффективности торможения используются и при проведении диагностирования автомобилей.
Известно устройство для бортового диагностирования тормозной системы автомобиля, выполненное в виде цифрового преобразователя [11], и содержащее датчик перемещения тормозной педали с импульсным щелевым преобразователем, первую дифференцирующую цепь, восьмиразрядный суммирующий электронный счетчик с восемью выходами, входом установки нуля и счетным входом, восемь светоизлучающих диодов, каждый из которых соединен с одним из восьми выходов счетчика, резисторы, автоколебательный симметричный мультивибратор.
Однако в нем с недостаточной точностью измеряется такой диагностический параметр тормозной системы автомобиля как время торможения, определяемый как промежуток времени между моментом нажатия на педаль и моментом окончания процесса торможения, из-за этого безопасность вождения снижается
Объясняется это тем, что этот промежуток времени должен измеряться между моментом нажатия на педаль и моментом времени окончания процесса торможения. В известном же устройстве момент окончания процесса торможения определяется субъективно водителем, когда он отпускает педаль. Поэтому результат измерения времени торможения отличается погрешностью.
Вследствие этого известное устройство отличается недостаточной точностью определения диагностического параметра, неисправности в тормозной системе обнаруживаются не полностью, безопасность вождения снижается, возникает необходимость в его совершенствования.
Для модернизации устройства использовано известное свойство автомобиля, заключающееся в том, что в начале торможения автомобиля возникает сила инерции, под действием которой его кузов перемещается вверх относительно исходного состояния, а при окончании процесса торможения сила инерции становится равной нулю и кузов автомобиля перемещается вниз в исходное положение.
Используя это свойство автомобиля для модернизации известного устройства [1] в нем установлен датчик перемещения кузова автомобиля со вторым импульсным преобразователем для регистрации момента возвращения кузова в исходное положение в виде электрического импульса напряжения.
Этот датчик установлен на кронштейне на заднем мосту автомобиля, и выполнен в виде катушки индуктивности с магнитным сердечником и стержнем, первым своим концом установленным возле катушки индуктивности, а вторым закрепленным на кузове автомобиля с обеспечением возможности перемещения его при перемещении кузова автомобиля в процессе торможения автомобиля из нижнего положения в верхнее от катушки индуктивности с магнитным сердечником, а при окончании процесса торможения обеспечением возможности перемещения стержня из верхнего положения в нижнее до катушки индуктивности. Для записи и хранения цифрового кода, отображающего время торможения в устройстве установлен восьмиразрядный параллельный регистр, каждый разряд которого состоит из логического элемента И с двумя входами и выходом, первым входом соединенного с одним из выходов электронного суммирующего счетчика, а вторым соединенного посредством шины записи с выходом второй дифференцирующей цепи датчика перемещения кузова, и асинхронного RS – триггера, содержащего два входа: вход установки нуля и счетный вход.
Устройство содержит (рисунок 2.1) датчик 5 перемещения тормозной педали 4 с первым импульсным преобразователем 2, выполненным щелевым на кронштейне 3 возле тормозной педали 4 с обеспечением возможности перемещения педали 4 в щели преобразователя, восьмиразрядный электронный суммирующий счетчик 29 с восемью выходами 36, 37, 38, 39, 40, 41, 42, 43, входом 32 установки нуля и счетным входом 30, первую дифференцирующую цепь 19, выполненную на двух резисторах 12, 17, конденсаторе 11 и отсекающем диоде 18, входом соединенную с выходом первого импульсного преобразователя 2, восемь светоизлучающих диодов 52, 53, 54, 55, 56, 57, 58, 59, мультивибратор 16, выполненный автоколебательным симметричным на двух 9, 13 логических элементах, двух конденсаторах 7,8, двух резисторах 10, 15 и двух диодах 6, 14, входом соединенный посредством резистора 1 с выходом первого импульсного преобразователя 2, а выходом посредством резистора 31 со счетным входом 30 электронного суммирующего счетчика 29, датчик 35 перемещения кузова 20 со вторым импульсным преобразователем 23, установленным на кронштейне 28 на заднем мосту 27 автомобиля, и выполненным в виде катушки 22 индуктивности с магнитным сердечником и стержнем 21, первым своим концом установленным возле катушки 22 индуктивности, а вторым концом закрепленным на кузове 20 автомобиля с обеспечением возможности перемещения стержня 21 при перемещении кузова 20 автомобиля в процессе торможения из нижнего положения в верхнее от катушки 22 индуктивности с магнитным сердечником, а при окончании процесса торможения обеспечением возможности перемещения стержня 21 из верхнего положения в нижнее до катушки 22 индуктивности с магнитным сердечником.

Рисунок – 2.1 Схема устройства для бортового диагностирования тормозной системы автомобиля
Вторая дифференцирующая цепь 34, выполнена на двух резисторах 25, 26 конденсаторе 24 и отсекающем диоде 33, входом соединенную с выходом второго импульсного преобразователя 23, восьмиразрядный параллельный регистр 48, каждый разряд которого состоит из логического элемента И 47 с двумя входами 44, 45 и выходом 49, первым входом 44 соединенного с одним из выходов электронного суммирующего счетчика 29, а вторым входом 45 соединенного посредством шины 46 записи с выходом второй дифференцирующей цепи 34 датчика 35 перемещения кузова 20, и асинхронного RS-триггера 50, содержащего два входа: R, являющийся входом установки нуля и S, являющийся счетным входом, и выход 51, при этом вход S каждого триггера 50 регистра 48 соединен с выходом 49 логического элемента И 47, вход R установки нуля каждого триггера 50 регистра 48 и вход 32 установки нуля электронного суммирующего счетчика 29 соединены параллельно с выходом первой дифференцирующей цепи 19, а каждый из восьми светоизлучающих диодов 52, 53, 54, 55, 56, 57, 58, 59 соединен с одним из восьми выходов 51 регистра 48.
Устройство работает следующим образом. При нажатии на тормозную педаль 4 на выходе преобразователя 2 импульсного щелевого датчика 5 перемещения педали 4 формируется напряжение (рис. 2.2) постоянного уровня, прикладываемое посредством резистора 1 к автоколебательному мультивибратору 16, на выходе автоколебательного мультивибратора 16 появляются прямоугольные импульсы напряжения (рис. 2.3).

Рисунок – 2.2 Напряжение на выходе преобразователя импульсного щелевого датчика перемещения педали

Рисунок – 2.3 Прямоугольные импульсы напряжения на выходе автоколебательного мультивибратора
Происходит это следующим образом. Пусть логический элемент 9 закрыт, тогда второй логический элемент 13 открыт, это означает, что на выходе логического элемента 9 имеется высокий уровень напряжения (логическая единица) и конденсатор 8 заряжается через резистор 15. Когда напряжение на резисторе 15 достигнет порогового значения логический элемент 13 начнет закрываться. Увеличение напряжения на выходе логического элемента 13 через конденсатор 7 будет передано на вход логического элемента 9 и вызовет его отпирание. Из-за этого произойдет снижение напряжения на выходе логического элемента 9, которое через конденсатор 8 будет передано на вход логического элемента 13 и приведет к дальнейшему уменьшению протекающего через него тока.
Благодаря наличию этой положительной обратной связи с выхода одного логического элемента на вход другого логический элемент 9 окажется открытым, а логический элемент 13 закрытым. В результате этого начнется зарядка конденсатора 7 через резистор 10, и результате протекающих процессов разрядки и зарядки соответствующих конденсаторов окажется логический элемент 9 закрыт, а логический элемент 13 опять открыт. Таким образом, на выходе логического элемента 13 формируется прямоугольный импульс напряжения.
Далее таким же образом формируется второй и последующие импульсы. На выходе логического элемента 13 появляется последовательность прямоугольных импульсов. Период этих импульсов определяется произведением 1,4RC, где R – сопротивление каждого из резисторов автоколебательного симметричного мультивибратора; C – емкость каждого из конденсаторов автоколебательного симметричного мультивибратора. Величина этого произведения определяет точность цифрового преобразования времени торможения и может быть равна, например, 0,1 c, что означает за время торможения, равное, например, 5 с на счетчик 29 поступит 50 импульсов, и на выходе счетчика в этом случае будет код, равный 00110010.
Одновременно, при нажатии на педаль 4 водителем на входе первой дифференцирующей цепи 19 с отсекающим диодом 18 появляется напряжение от первого импульсного щелевого преобразователя 2, оно дифференцируется и на выходе цепи 19 появляется положительный импульс напряжения (рис. 2.4), который параллельно подается на вход 32 установки нуля электронного суммирующего счетчика и входы R установки нуля триггеров 50 параллельного регистра 48. Электронный суммирующий счетчик обнуляется и может осуществлять преобразование импульсов в цифровой код, которые поступят на счетный вход 30 счетчика. Также обнуляются все триггеры 50 регистра 48, после чего во все триггеры регистра можно записывать код.

Рисунок – 2.4 Положительный импульс напряжения на выходе первой дифференцирующей цепи с отсекающим диодом
Далее происходит подсчет импульсов счетчиком, поступающих от автоколебательного симметричного мультивибратора на счетный вход 30 счетчика и преобразование его в цифровой код. В процессе торможения возникает сила инерции, под действием которой кузов 20 автомобиля со стержнем 21 перемещается из нижнего положения в верхнее от катушки 22 индуктивности с магнитным сердечником, а при окончании процесса торможения кузов автомобиля со стержнем снова перемещается в исходное положение из верхнего положения в нижнее до катушки индуктивности.
При этом при перемещении кузова в верхнее положение на выходе второй дифференцирующей цепи 34 формируется отрицательный импульс напряжения (рисунок 2.5), который не пропускается отсекающим диодом на шину 46 записи регистра 48, а в конце процесса торможения при опускании кузова и стержня в исходное до торможения нижнее положение возле катушки 22 индуктивности на выходе второй дифференцирующей цепи 34 формируется положительный импульс напряжения (рисунок 2.5), который поступает посредством шины записи на входы 45 логического элемента И 47 и на выходе регистра формируется код, с помощью которого отображается время торможения автомобиля. Он запоминается и высвечивается с помощью светоизлучающих диодов 52, 53, 54, 55, 56, 57, 58, 59. После записи в регистр кода водитель может отпустить тормозную педаль.

Рисунок – 2.5 Импульсы напряжения на выходе второй дифференцирующей цепи
при перемещении кузова в процессе торможения автомобиля
Формирование кода с помощью параллельного регистра происходит следующим образом. Покажем это на примере упомянутого выше кода, равного 00110010, поэтому на первых входах 44 двух первых логических элементов И 47 регистра имеются нули. Поэтому, при подачи посредством шины записи импульс напряжения от второй дифференцирующей цепи на вторые входы 45 на выходе двух первых логических элементах И 47 имеются нули. Вследствие этого на обоих входах первых двух триггеров 50 имеются нули, а при подаче на оба входа асинхронного RS-триггера нулей на выходе его имеется ноль. Таким образом, в первые два триггеры 50 регистра 48 записаны первый и второй нули полученного на выходе электронного суммирующего счетчика 29.
Приведем теперь пример записи третьей единицы полученного кода, в этом случае на первом входе 44 третьего логического элемента И 47 регистра 48 имеется единица. Поэтому при подачи посредством шины записи импульс напряжения от второй дифференцирующей цепи 34 на второй вход 45 на выходе логического элемента И 47 имеется единица. Вследствие этого на первом входе S третьего триггера 50 имеется единица, а на втором входе R асинхронного RS-триггера имеется ноль, а при подаче на вход S единицы, а на вход R нуля асинхронного RS-триггера на его выходе устанавливается единица. Таким образом, в третий триггер 50 регистра 48 записана единица, полученного на выходе электронного суммирующего счетчика 29 кода.
На выходе параллельного регистра 48 появляется время торможения автомобиля в виде цифрового кода, от момента нажатия тормозной педали до окончания процесса торможения. При сравнении этого время торможения с нормативным временем торможения для данных условий движения принимается решение о техническом состоянии тормозной системы автомобиля. Если время торможения автомобиля превышает нормативное время торможения, принимается решение о наличии неисправности.
Таким образом, использование информации о возникшей неисправности в тормозной системе позволяет повысить безопасность вождения путем предотвращения эксплуатации автомобилей с неисправной тормозной системой, а также снизить расходы на ремонт автомобилей путем определения фактического технического состояния тормозной системы автомобилей непосредственно водителем в процессе их эксплуатации.
Устройство для бортового диагностирования тормозных систем автомобиля по замедлению
Устройство относится к транспортному машиностроению, а именно к бортовым устройствам для диагностирования тормозной системы автомобиля, и может быть использовано для повышения безопасности вождения и снижения расходов на ремонт автомобилей путем определения фактического технического состояния тормозной системы автомобилей непосредственно в процессе их эксплуатации и последующего устранения разрегулировок и неисправностей, если они обнаруживаются.
В результате проведения научно-исследовательских работ выявлено, что диагностирование тормозной системы автомобилей на известных инерционных стендах отличается большими погрешностями, так как недостаточно точно определяется на стенде такой диагностический параметр как замедление. Объясняется это тем, что условия диагностирования тормозной системы на стенде отличаются малой степенью приближения к реальным эксплуатационным условиям работы автомобиля. Это отличие происходит потому, что ведущие колеса автомобиля, установленного на стенд для диагностирования тормозной системы вращаются по поверхности роликов, а эта поверхность отличается от поверхности дороги. Кроме того, на создание и эксплуатацию стенда для диагностирования тормозной системы требуются большие затраты, в то время как на создание и оборудование автомобиля устройством для бортового диагностирования тормозной системы затраты уменьшаются в десятки раз.
Известен также переносной прибор – деселерометр, с помощью которого измеряется замедление, которое измеряют на ровном горизонтальном участке дороги, при этом автомобиль разгоняют до скорости 10 км/час, что соответствует идеальным условиям работы автомобиля, а не его естественным условиям работы, отличающимися работой по дорогам с неровностями, а они непрерывно изменяются. Поэтому точность определения замедления отличается большими погрешностями.
Устройство содержит (патент РБ 18937, 2015. 02) датчик 19 частоты вращения (рисунок 2.6) затормаживаемого колеса автомобиля, содержащий металлический диск 4 с прорезями и выступами, установленный на валу 2 затормаживаемого колеса 1 автомобиля, импульсный щелевой преобразователь 3, установленный вблизи диска 4 с обеспечением возможности вхождения выступов диска в щель преобразователя 3, первую дифференцирующую цепь 8, включающую в себя резисторы 5 и 7 и конденсатор 6, выпрямитель 14 на четырех импульсных диодах 10, 11, 12, 13, интегрирующую цепь, выполненную на резисторе 16 и конденсаторе 17, выходной резистор датчика 18, регулируемый источник 26 постоянного тока с реостатом 23 и движком 25, последовательно соединенные компаратор 29 с инвертирующим 27 и неинвертирующим 28 входами, повторитель 30 напряжения, диод 31, электрическую лампу 15, установленную на щитке 9 приборов в кабине 24 автомобиля, при этом неинвертирующий вход 28 компаратора 29 соединен с выходом регулируемого источника 26 постоянного тока, вторую дифференцирующую цепь 22, выполненную на резисторе 21 и конденсаторе 20, входом соединенную с выходом датчика 19 частоты вращения затормаживаемого колеса 1 автомобиля, выходом соединенную с инвертирующим 27 входом компаратора 29, величина напряжения, подаваемого на неинвертирующий 28 вход компаратора установлена равной нормативной величине замедления автомобиля, а постоянная времени второй дифференцирующей цепи 22 выбрана такой величины, чтобы был обеспечен на выходе второй дифференцирующей цепи уровень напряжения при исправной тормозной системе больше нормативного уровня, подаваемого на неинвертирующий 28 вход компаратора, при этом импульсный диод 31, включен в обратном направлении.
При торможении снижается частота вращения колеса 1, которая измеряется датчиком следующим образом. При вращении колеса выступы диска 4 проходят через щели преобразователя 3 и на резисторе 5 возникают прямоугольные импульсы напряжения, которые дифференцируются первой дифференцирующей цепью 8. На резисторе 7 возникают разнополярные экспоненциальные импульсы напряжения одинаковой формы и площади, при этом количество импульсов будет больше за одинаковый промежуток времени, и меньше, если частота вращения колеса снижается. С помощью выпрямителя 14, выполненного на четырех импульсных диодах, импульсы выпрямляются, а с помощью интегрирующей цепи импульсы сглаживаются. На выходном резисторе 18 формируется напряжение, уровень которого пропорционален частоте вращения колеса.
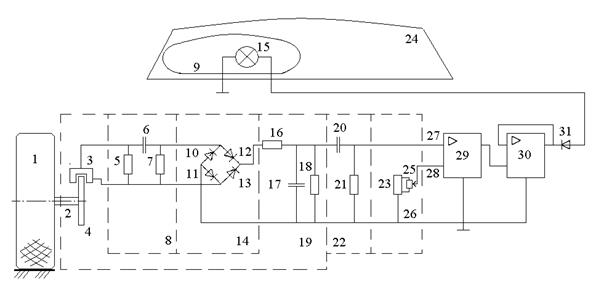
Рисунок – 2.6 Схема устройства для диагностирования автомобиля по времени торможения
Полученное напряжение на выходе датчика 19 непрерывно снижается при торможении автомобиля по экспоненциальному закону и подается на вход второй дифференцирующей цепи 22, на выходе которой появляется напряжение, пропорциональное производной от изменения частоты вращения колеса 1. Если тормозная система не имеет неисправностей, частота вращения падает быстрее, т.е. с меньшей постоянной времени. Поэтому наибольшее значение производной от падения частоты вращения колеса больше, чем в системе, имеющей неисправности. С помощью регулируемого источника 26 постоянного тока перемещением движка 25 реостата 23 устанавливается нормативное значение максимума производной от падения частоты вращения колеса при торможении автомобиля, которое меньше максимального значения производной от частоты вращения затормаживаемого колеса для тормозной системы, не имеющей неисправностей на некоторую заданную величину.
Диагностирование тормозной системы производится следующим образом. Если тормозная система автомобиля не имеет неисправностей, максимальное значение напряжения, подаваемое на инвертирующий вход 27 компаратора 29 больше, чем нормативное значение напряжения, подаваемое на неинвертирующий вход 28 компаратора от источника 26 постоянного тока. На выходе компаратора в соответствии с его передаточной характеристикой, изображенной на рисунке 2.7, формируется отрицательное напряжение, которое посредством повторителя 30, диода 31 прикладывается к электрической лампе 15, лампа загорается. Принимается решение, что тормозная система находится в хорошем техническом состоянии.
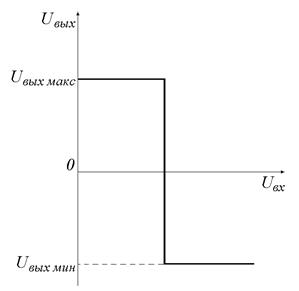
Рисунок – 2.7 Передаточная характеристика компаратора
Если диагностируемая тормозная система имеет неисправности, максимальное значение напряжения, подаваемое на инвертирующий вход 27 компаратора меньше, чем напряжение, подаваемое на неинвертирующий вход 28 компаратора от источника 26 постоянного тока. На выходе компаратора в соответствии с его передаточной характеристикой формируется положительное напряжение, которое посредством повторителя прикладывается к диоду 31. Диод заперт, лампа не загорается. Принимается решение, что тормозная система имеет неисправности. Необходимо прекратить эксплуатацию автомобиля и приступить к проведению работ по устранению возникшей неисправности.
Таким образом, использование информации о возникшей неисправности позволяет повысить безопасность вождения путем предотвращения эксплуатации автомобиля с неисправной тормозной системой, а также снизить расходы на ремонт автомобилей путем определения фактического технического состояния тормозной системы автомобилей непосредственно в процессе их эксплуатации.
Дата добавления: 2021-04-15; просмотров: 240; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!