Основные задачи теории управления
Пояснение некоторых понятий
Автоматическое управление - управление без участия человека.
Автоматизированное управление - управление человеком при помощи каких-либо устройств.
Кибернетика - общая теория управления.
Техническая кибернетика - связана с изучением вопросов управления в технических системах.
Предмет технической кибернетики - анализ информационных процессов управления техническими объектами, синтез алгоритмов управления ими и создание системы управления, реализующей эти алгоритмы.
Система автоматического управления (САУ) - совокупность объекта управления, управляющей и информационно-измерительной подсистем.
Теория автоматического управления (ТАУ) - занимается изучением свойств, разработкой метода анализа и синтеза систем автоматического управления.
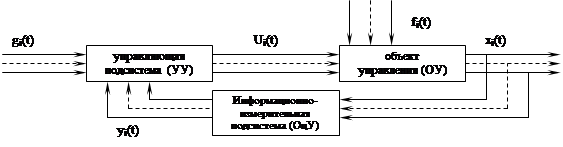
Рис 1.1. Общая схема САУ
На рисунке 1.1 приведена общая схема САУ, где:
ОцУ - блок оценивающего управления,
xi (t) (где i=1..n ) - фазовые координаты (переменные состояния), характеризуют состояние объекта управления в пространстве времени.
Ui (t) ( где i=1..m ) - управляющие переменные (управляющие воздействия).
gi(t) ( где i=1..k ) - задающие внешние входные воздействия.
yi(t) ( где i=1..r ) - измеряемые (наблюдаемые) переменные.
fi(t) ( где i=1..p ) - возмущающие воздействия.
В современной теории управления к объекту управления относят кроме собственно объекта его исполнительные органы, предшествующие им усилители и чувствительные элементы измерительного устройства.
|
|
|
1.2 Принципы действия систем
Все системы автоматического управления разделяются в зависимости от принципа формирования управляющего воздействия на системы разомкнутого типа и системы замкнутого типа
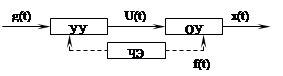
Рис 1.2 Схема САУ разомкнутого типа.
ЧЭ - чувствительный элемент.
ОУ – объект управления
Выходная переменная X(t) не контролируется, управление формируется по заранее рассчитанной программе g(t) или на основании компенсации измеренного возмущающего воздействия f(t).
Недостатком САУ разомкнутого типа является возможность удовлетворительно функционировать только при постоянстве характеристик объекта, управления и в условиях низкого возмущения.
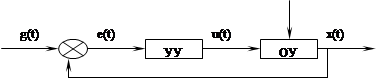
Рис 1.3 Схема САУ замкнутого типа.
Система автоматического управления замкнутого типа работает по принципу отрицательной обратной связи, в них реализуются измерение и контроль отклонения управляемой переменной X(t) от задающего воздействия g(t). Цель управления - изменение ошибки e(t):
e(t)=g(t)-x(t)
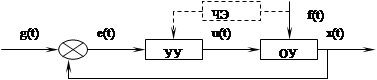
Рис 1.4 Схема САУ комбинированного типа.
Эта схема обладает наилучшими свойствами и чаще других используется как для слежения, так и для стабилизации и программного управления при решении задач, в которых требуется получить высокие точность и быстродействие. Возмущение измеряется непосредственно или косвенно и подается на регулятор для коррекции управляющей величины, что позволяет быстро в значительной мере компенсировать влияние возмущения на управляемую величину. Недокомпенсацию существенно уменьшает контур управления по отклонению, который в итоге и обеспечивает требуемую точность слежения.
|
|
|
В зависимости от вида задающего воздействия g(t), определяющего желание изменения x(t) различают следующие классы САУ:
1) Система стабилизации g(t)=const (примером является автопилот самолёта).
2) Система программного управления g(t) - заданная функция от времени.
3) Следящие системы g(t) - заранее неизвестная функция от времени, определяется по ходу происшествия событий (примером является следящая система зенитных установок).
1.3 Функциональные схемы. Способы классификаций
Функциональная схема - это условное изображение САУ, отражающее состав и порядок взаимодействия входящих в неё элементов. Элементы на схеме соединяются в той же последовательности, в которой они работают в действительности.
|
|
|

Типичная схема САУ.
I- измерительный элемент,
II- вычислительный блок,
III- привод регулирующего органа,
IV- объединенный объект управления,.
1- задающий элемент,
2- чувствительный элемент (измеряет перемещение, перегрузку),
3- датчик-преобразователь,
4- элемент сравнения,
5- преобразующий элемент,
6- усилительный блок,
7- управляющий элемент,
8- исполнительный механизм,
9- регулирующий орган,
10- корректирующее устройство для улучшения динамических свойств системы управления.
В системах автоматического управления имеется главная отрицательно-обратная связь, и могут быть дополнительные внутренние обратные связи. Сигнал обратной связи может суммироваться, тогда связь положительная, главная обратная связь всегда отрицательная.
 Обозначения:
Обозначения:
Во многих случаях элементы системы управления обладают детектирующим свойством, т.е. передают воздействия в одном направлении, поэтому каждый последующий элемент практически не оказывает влияния на предыдущий. Для каждого элемента можно составлять уравнение динамики независимо от остальных элементов включенных в цепь.
Способы классификации САУ
1. По принципам управления.
|
|
|
А) Разомкнутые.
В) Замкнутые.
С) Комбинированные.
2. По способу противодействия вредным влияниям (возмущениям).
А) Адаптивные.
В) Неадаптивные.
Адаптивные – это системы, которые автоматически приспосабливаются к изменяющимся внешним условиям работы и к изменениям свойств объекта. Эти системы могут улучшать свою работу в процессе накопления опыта. Это достигается путем изменения алгоритма управления или структуры системы.
3. По характеру изменения во времени сигнала.
А) Непрерывного действия.
В) Дискретного действия.
В системах непрерывного действия входной и выходной сигналы непрерывны. В дискретных системах регулярно размыкаются цепи или скачкообразно изменяются коэффициенты передачи сигналов. Системы управления дискретного действия разделяются на:
А) Релейные (содержит релейный элементы).
В) Импульсные (содержит импульсный элемент).
С) Цифровые (содержат цифровую управляющую машину).
4. По свойствам параметра.
А) Стационарные (все параметры стационарные).
В) Нестационарные (хотя бы один параметр системы изменяется во времени).
5.По виду дифференциальных уравнений.
А) Линейные.
В) Нелинейные.
Линейной называется система, если после упрощения она описывается линейным дифференциальным уравнением. Для линейной системы справедлив принцип суперпозиции: реакция системы на совместные действия приложенных воздействий равна сумме реакций системы на каждое из этих воздействий в отдельности.
P . S . Возможны другие способы классификации системы.
1.4 Законы управления
Законом управления называется закон формирования управляющего воздействия функции управляемой переменной и внешних воздействий.
U= (x,g,f,).
Рассмотрим наиболее простые законы управления.
1. Релейный.
u=c, l<b
u=0, l<b
u=-c, l<b
где l=g-x - ошибка (отклонение).
2b – величина зоны нечувствительности.
2. Пропорциональный закон.
U=k*l
где k коэффициент передачи (усиление).
3. Пропорционально-дифференциальный закон.
4. Интегральный закон.
5. Пропорционально-интегральный закон.
6. Пропорционально-интегрально-дифференциальный закон.
Основные задачи теории управления
ТАУ изучает наиболее общие присущие автоматическим устройствам и системам закономерности и поведение в установившихся и переходных режимах.
Установившийся режим – система работает в одном режиме.
Переходный режим – переходит от одного режима к другому.
Предмет ТАУ изучает методы анализа и синтеза систем автоматического управления.
Замечание:
1. Задачи, решаемые в ТАУ, в большей мере являются математическими. В основе исследования лежат математические модели, а необходимым условием является адекватность (соответствие) математической модели. Составление уравнений математической модели требует знаний о физических явлениях и особенностях процессов, протекающих в конкретных системах управления и поэтому, как правило, выходит за рамки ТАУ.
2. Значения коэффициентов уравнений (параметров модели) часто вычисляются на основании экспериментальных данных. Эта задача называется задачей идентификации.
В общем случае наличие случайных погрешностей, неопределенностей и возмущений предопределяют стохастическую природу задач синтеза систем управления. Для упрощения задача разделяется на следующие самостоятельные подзадачи.
1. Задача детерминированного управления заключается в разработке закона (или алгоритма) управления в предположении абсолютной точности математической модели объекта управления, отсутствие погрешности измерения, преобразования сигналов.
2. Задача стохастическая заключается в разработке закона (или алгоритма) управления, обеспечивающего максимальную близость математического ожидания оценки состояния объекта управления желаемому значению в условиях случайного характера возмущений, неопределенности знаний параметров объекта измерительного устройства.
3. Задача оптимального управления заключается в определении закона (или алгоритма) управления, при котором достигается экстремум выбранного функционала (критерия оптимальности) с учетом ограничений на параметры состояния и управлений.
Замечание: Если речь идет об оптимальном управлении.
4. Задача адаптивного управления заключается в разработке закона (или алгоритма) управления, обеспечивающего близость оценки состояния к желаемому в условиях переменности характеристик объекта управления. При этом задача управления и идентификации решается совместно.
II МАТЕМАТИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ САУ
2.1 Методики составления математических моделей
При составлении математической модели САУ представляется в виде совокупности элементов, которые рассматриваются с точки зрения их динамических свойств. При этом элементы (звенья) рассматриваются самостоятельно. В общем случае элементы или звенья системы могут быть устройствами любой физической природы и назначения.
Методика построения математической модели каждого конкретного элемента СУ, включая объект управления, является предметом изучения соответствующих наук.
Рассмотрим общие принципы: существуют два принципиально разных подхода к составлению математической модели:
1. Теоретический.
2. Эмпирический.
I. Теоретический
При этом подходе математическая модель строится на основании общих законов, которыми описываются процессы в звене. Эти законы записываются с помощью системы уравнений, связывающей входные переменные, а именно управляющие и возмущающие воздействия, с выходными. Обычно это уравнения баланса массы, энергии, количества движения.
В таком варианте математическая модель получается в виде системы неоднородных нелинейных дифференциальных уравнений, не имеющей общего решения. При этом исходная математическая модель очень сложна для анализа, т.к. существуют только частные решения, и провести обобщение практически невозможно.
Иногда задачу интегрирования нелинейных уравнений удаётся свести к более простой задаче: решение линейных дифференциальных уравнений. Достаточным условием для проведения линеаризации является отсутствие неразрывных, неоднозначных функций.
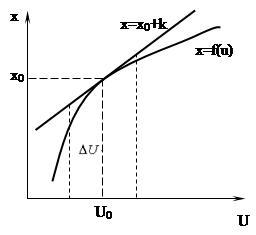
Линеаризация основана на положении, что непрерывная и имеющая все производные в окрестности некоторой точки функция может быть разложена в ряд Тейлора по степеням малых отклонений элемента:


Если отклонение аргумента DU мало, то можно ограничится первыми линейными членами разложения и рассматривать вместо нелинейной функции x=f(u) линейную. Опуская символ приращения D, получим:
 , где
, где
k – коэффициент усиления звена.
В результате линеаризации получим линеаризованную математическую модель, которую обычно называют линейной математической моделью звена или системы.
В зависимости от необходимой точности можно брать различные DU, но на практике встречаются случаи, когда линеаризацию провести нельзя. Обычно это связанно с наличием в системе элементов с зонами нечувствительности, насыщения, ограничениями по положению и скорости, а так же релейных элементов. В этих случаях используют нелинейную модель, а при анализе и синтезе специальные методы.
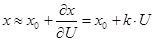
II. Эмпирический
При построении эмпирической модели не обязательно знать природу процессов, протекающих в звене, достаточно иметь сведения об их внешних проявлениях. Достаточно исследовать реакции выходных переменных на известные входные воздействия. В результате выбирается общий вид функциональной зависимости между входным и выходным воздействием, затем определяются численные коэффициенты или параметры модели.
 Ограничения: решение задачи основано на конкретном эксперименте, что делает невозможным применение к другим системам.
Ограничения: решение задачи основано на конкретном эксперименте, что делает невозможным применение к другим системам.
Дата добавления: 2021-04-05; просмотров: 128; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!