Физический смысл Кориолисовa ускорения
Скорости и ускорения точек вращающегося тела.
Установив характеристики движения всего тела в целом, перейдем к изучению движения отдельных его точек.
1. Скорости точек тела. Рассмотрим какую-нибудь точку М твердого тела, находящуюся на расстоянии h от оси вращения (см. рис.9). При вращении тела точка М будет описывать окружность радиуса h, плоскость которой перпендикулярна оси вращения, а центр С лежит на самой оси. Если за время dt происходит элементарный поворот тела на угол dφ, то точка М при этом совершает вдоль своей траектории элементарное перемещение ds=hdφ. Тогда числовое значение скорости точки будет равно отношению ds к dt, т.е

Скорость  в отличие от угловой скорости тела называют иногда еще линейной или окружной скоростью точки М.
в отличие от угловой скорости тела называют иногда еще линейной или окружной скоростью точки М.
Таким образом, числовое значение скорости точки вращающегося твердого тела равно произведению угловой скорости тела на расстояние от этой точки до оси вращения.
Направлена скорость по касательной к описываемой точкой окружности или перпендикулярно плоскости, проходящей через ось вращения и точку М.
Так как для всех точек тела  имеет в данный момент времени одно и то же значение, то скорости точек вращающегося тела пропорциональны их расстояниям от оси вращения.
имеет в данный момент времени одно и то же значение, то скорости точек вращающегося тела пропорциональны их расстояниям от оси вращения.
Рис.11 Рис. 12
2. Ускорения точек тела. Для нахождения ускорения точки М воспользуемся формулами
В нашем случае ρ=h. Подставляя значение v в выражения aτ и an, получим:
|
|
|
или окончательно:

Касательная составляющая ускорения aτ направлена по касательной к траектории (в сторону движения при ускоренном вращении тела и в обратную сторону при, замедленном); нормальная составляющая an всегда направлена по радиусу МС к оси вращения (рис.12). Полное ускорение точки М будет

Отклонение вектора полного ускорения от радиуса описываемой точкой окружности определяется углом μ, который вычисляется по формуле

Подставляя сюда значения aτ и an, получаем

Так как ω и ε имеют в данный момент времени для всех точек тела одно и то же значение, то ускорения всех точек вращающегося твердого тела пропорциональны их расстояниям от оси вращения и образуют в данный момент времени один и тот же угол μ с радиусами описываемых ими окружностей. Поле ускорений точек вращающегося твердого тела имеет вид, показанный на рис.14.
Рис.13 Рис.14
3. Векторы скорости и ускорения точек тела. Чтобы найти выражения непосредственно для векторов v и a, проведем из произвольной точки О оси АВ радиус-вектор  точки М (рис. 13). Тогда h=r∙sinα и по формуле
точки М (рис. 13). Тогда h=r∙sinα и по формуле

Таким образом, модуль векторного произведения  равен модулю скорости точки М. Направления векторов и v тоже совпадают (оба они перпендикулярны плоскости ОМВ) и размерности их одинаковы. Следовательно,
равен модулю скорости точки М. Направления векторов и v тоже совпадают (оба они перпендикулярны плоскости ОМВ) и размерности их одинаковы. Следовательно,  - формула Эйлера, т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки.
- формула Эйлера, т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки.
|
|
|
7. Плоскопараллельное движение. Теорема о скоростях точек плоской фигуры.
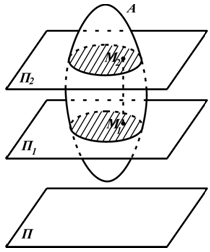
Плоскопараллельным (плоским) движением (ППД) твердого тела называется такое движение, при котором все точки тела перемещаются в плоскостях параллельных некоторой неподвижной плоскости (рисунок 2.11).
При таком движении точки, лежащие в разных плоскостях на одном отрезке, перпендикулярном неподвижной плоскости (например M1M2 ) совершают одинаковые движения.
Теорема о скоростях точек
Скорость любой точки плоской фигуры равна геометрической сумме скорости выбранного полюса и скорости точки во вращательном движении фигуры вокруг полюса.
Производная от вектора AM, постоянного по величине и переменного по направлению, численно равна скорости точки М при вращении ее вокруг точки А.
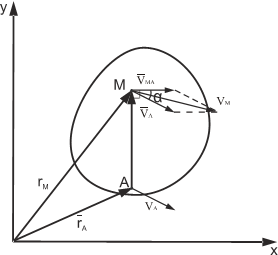
Рис. 1.3
Вектор VMA= ω⋅AM перпендикулярен отрезку АМ.
Численную величину скорости точки М можно получить, если воспользоваться теоремой косинусов
|
|
|

или спроецировать векторное равенство (1) на выбранные оси координат
8. Мгновенный центр скоростей и его применение при решении задач.
Мгнове́нный центр скоросте́й — при плоскопараллельном движении абсолютно твёрдого тела точка, связанная с этим телом, которая обладает следующими свойствами: а) её скорость в данный момент времени равна нулю; б) относительно неё в данный момент времени вращается тело. Она существует в любой момент времени, но её положение меняется со временем за исключением одного случая — вращательного движения.
Теорема Эйлера-Шаля доказывает, что любое непоступательное перемещение фигуры в плоскости можно осуществить поворотом вокруг некоторого неподвижного центра. В соответствии с этим легко доказывается, что при плоско-параллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нолю. Эту точку называют мгновенным центром скоростей (МЦС). В учебниках эту точку пишут с индексом V, например PV, CV.
При определении положения МЦС скорость любой точки может быть записана:VM=VCV+VMCV , где точка СV выбрана за полюс. Поскольку это МЦС и VCV=0 , то скорость любой точки определяется как скорость вращении вокруг мгновенного центра скоростей.
|
|
|
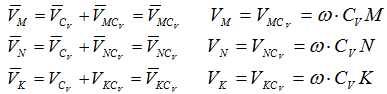
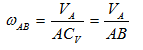
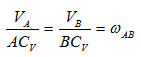
Из рис. 1.5 видно, что мгновенный центр скоростей лежит в точке пересечения перпендикуляров, проведенных к скоростям точек, при этом всегда справедливо соотношение
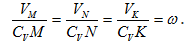
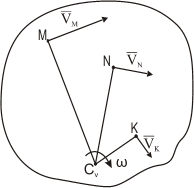
Рис. 1.5
На нижеприведенных рисунках показаны примеры определения положения мгновенного центра скоростей и приведены формулы для расчета скоростей точек.
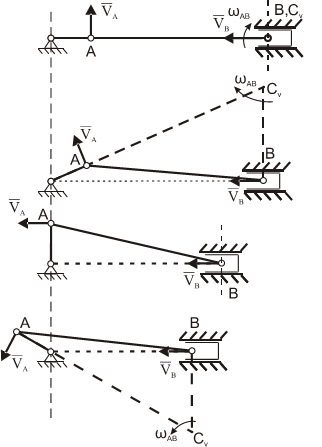
Для рисунка 1.6:
1. СV совпадает с точкой В VB=0. Шатун АВ вращается вокруг точки В
2.
3. МЦС лежит в «бесконечности»
4.
Рис. 1.6
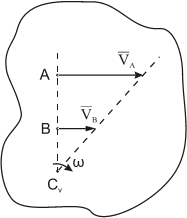
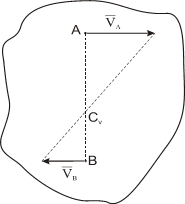
Рис. 1.7
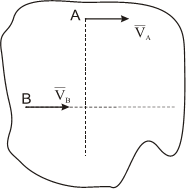
Рис. 1.8
здесь VB II VA
В этом случае МЦС находится в “бесконечности” , т.е
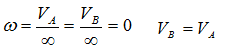

Рис. 1.9
Формулы справедливы при отсутствии проскальзывания в точке СV.
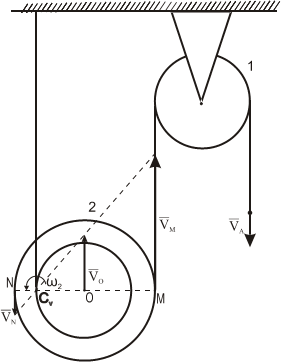
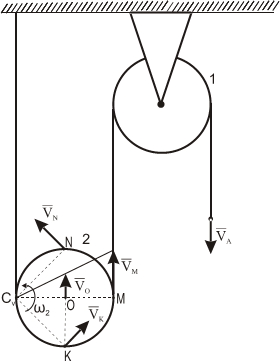

Рис. 1.10
9. Теорема об ускорениях точек плоской фигуры.
Покажем, что ускорение любой точки М плоской фигуры (так же, как и скорость) складывается из ускорений, которые точка получает при поступательном и вращательном движениях этой фигуры. Положение точки М по отношению к осям О xy (см.рис.30) определяется радиусом-вектором  где
где  . Тогда
. Тогда
В правой части этого равенства первое слагаемое есть ускорение  полюса А, а второе слагаемое определяет ускорение
полюса А, а второе слагаемое определяет ускорение  , которое точка м получает при вращении фигуры вокруг полюса A. следовательно,
, которое точка м получает при вращении фигуры вокруг полюса A. следовательно,
 .
.
Значение , как ускорения точки вращающегося твердого тела, определяется как
 ,
,
где  и
и  - угловая скорость и угловое ускорение фигуры, а
- угловая скорость и угловое ускорение фигуры, а  - угол между вектором
- угол между вектором  и отрезком МА (рис.41).
и отрезком МА (рис.41).
Таким образом, ускорение любой точки М плоской фигуры геометрически складывается из ускорения какой-нибудь другой точки А, принятой за полюс, и ускорения, которое точка М получает при вращении фигуры вокруг этого полюса. Модуль и направление ускорения  , находятся построением соответствующего параллелограмма (рис.23).
, находятся построением соответствующего параллелограмма (рис.23).
Однако вычисление  с помощью параллелограмма, изображенного на рис.23, усложняет расчет, так как предварительно надо будет находить значение угла
с помощью параллелограмма, изображенного на рис.23, усложняет расчет, так как предварительно надо будет находить значение угла  , а затем - угла между векторами
, а затем - угла между векторами  и
и  , Поэтому при решении задач удобнее вектор заменять его касательной
, Поэтому при решении задач удобнее вектор заменять его касательной  и нормальной
и нормальной  составляющими и представить в виде
составляющими и представить в виде
 .
.
При этом вектор  направлен перпендикулярно АМ в сторону вращения, если оно ускоренное, и против вращения, если оно замедленное; вектор
направлен перпендикулярно АМ в сторону вращения, если оно ускоренное, и против вращения, если оно замедленное; вектор  всегда направлен от точки М к полюсу А (рис.42). Численно же
всегда направлен от точки М к полюсу А (рис.42). Численно же
 .
.
Если полюс А движется не прямолинейно, то его ускорение можно тоже представить как сумму касательной  и нормальной
и нормальной  составляющих, тогда
составляющих, тогда
 .
.
Рис.41 Рис.42
Наконец, когда точка М движется криволинейно и ее траектория известна, то  можно заменить суммой
можно заменить суммой  .
.
10. Сложное движение точки. Теорема о сложении скоростей.
Сложное движение точки
Законы Ньютона сформулированы для движения точки по отношению к инерциальным системам отсчета. Для определения кинематических параметров точки при движении относительно произвольно движущейся системы отсчета вводится теория сложного движения.
Сложным называют движение точки по отношению к двум или нескольким системам отсчета.
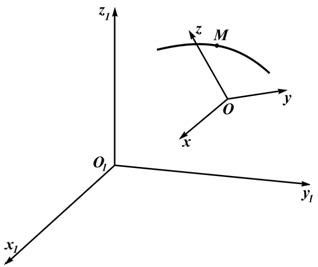
Рисунок 3.1
На рисунке 3.1 показаны:
- условно принимаемая за неподвижную система отсчета O1x1y1z1;
- движущаяся относительно неподвижной система отсчета Oxyz;
- точка M, перемещающаяся по отношению к подвижной системе отсчета.
Движение точки M в данном случае является сложным. Её движение по отношению к подвижной системе отсчета называют относительным движением.
Теоре́ма о сложе́нии скоросте́й — одна из теорем кинематики, связывает между собой скорости материальной точки в различных системах отсчёта. Утверждает, что при сложном движении материальной точки её абсолютная скорость равна сумме относительной и переносной скоростей
11. Теорема Кориолиса. Физический смысл кориолисова ускорения.
Теорема Кариолиса
Теорема о разложении абсолютного ускорения. Если точка движется в системе отсчета, которая в свою очередь движется относительно некоторой абсолютной системы отсчета, принимаемой за неподвижную, то абсолютное ускорение точки аа является суммой трех ускорений: относительного ускорения ar в движущейся системе отсчета; переносного ускорения аt, т. е. ускорения той точки движущейся системы отсчета, с которой совпадает в данный момент движущаяся точка; дополнительного, так называемого поворотного ускорения, или ускорения Кориолиса аc, обусловленного взаимным влиянием вращательного движения подвижной системы отсчета и относительного движения самой точки. При этом
 где Ω — угловая скорость подвижной системы отсчета и Vr — относительная скорость рассматриваемой точки.
где Ω — угловая скорость подвижной системы отсчета и Vr — относительная скорость рассматриваемой точки.
|
Физический смысл Кориолисовa ускорения
Или
Таким образом,
Дата добавления: 2021-03-18; просмотров: 92; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!